 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Illumination-Invariant Loss for Monocular 3D Pose Estimation
Nov 28, 2013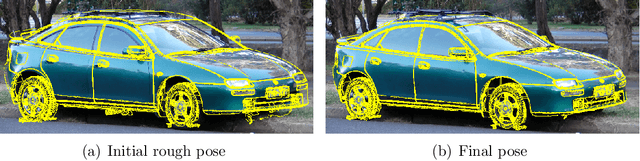
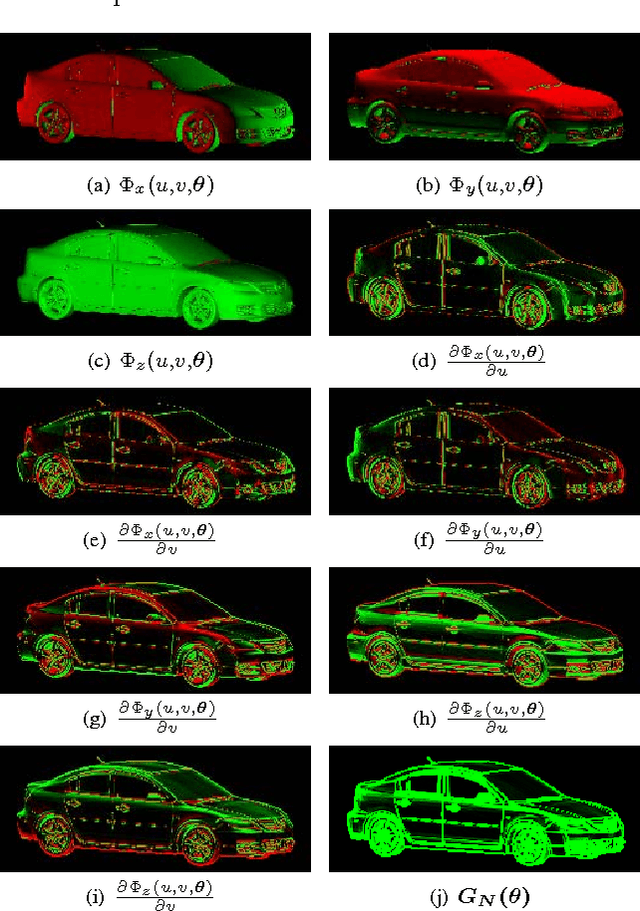
The problem of identifying the 3D pose of a known object from a given 2D image has important applications in Computer Vision. Our proposed method of registering a 3D model of a known object on a given 2D photo of the object has numerous advantages over existing methods. It does not require prior training, knowledge of the camera parameters, explicit point correspondences or matching features between the image and model. Unlike techniques that estimate a partial 3D pose (as in an overhead view of traffic or machine parts on a conveyor belt), our method estimates the complete 3D pose of the object. It works on a single static image from a given view under varying and unknown lighting conditions. For this purpose we derive a novel illumination-invariant distance measure between the 2D photo and projected 3D model, which is then minimised to find the best pose parameters. Results for vehicle pose detection in real photographs are presented.
3D Model Assisted Image Segmentation
Feb 09, 2012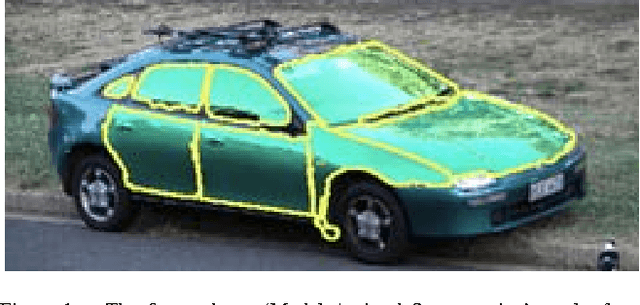
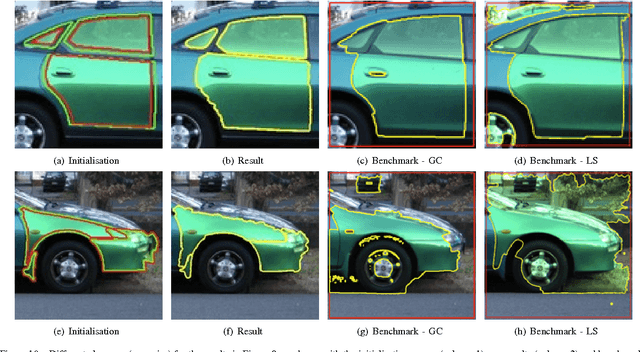
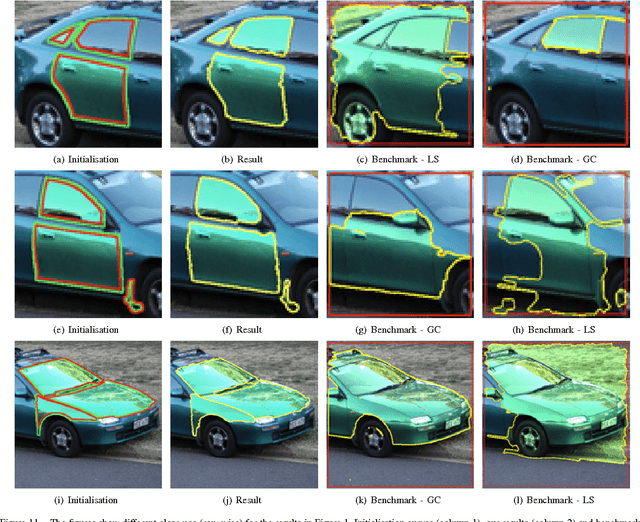
The problem of segmenting a given image into coherent regions is important in Computer Vision and many industrial applications require segmenting a known object into its components. Examples include identifying individual parts of a component for process control work in a manufacturing plant and identifying parts of a car from a photo for automatic damage detection. Unfortunately most of an object's parts of interest in such applications share the same pixel characteristics, having similar colour and texture. This makes segmenting the object into its components a non-trivial task for conventional image segmentation algorithms. In this paper, we propose a "Model Assisted Segmentation" method to tackle this problem. A 3D model of the object is registered over the given image by optimising a novel gradient based loss function. This registration obtains the full 3D pose from an image of the object. The image can have an arbitrary view of the object and is not limited to a particular set of views. The segmentation is subsequently performed using a level-set based method, using the projected contours of the registered 3D model as initialisation curves. The method is fully automatic and requires no user interaction. Also, the system does not require any prior training. We present our results on photographs of a real car.
* 18 LaTeX pages, 11 figures, 1 algorithm, 1 table
Featureless 2D-3D Pose Estimation by Minimising an Illumination-Invariant Loss
Nov 03, 2010
The problem of identifying the 3D pose of a known object from a given 2D image has important applications in Computer Vision ranging from robotic vision to image analysis. Our proposed method of registering a 3D model of a known object on a given 2D photo of the object has numerous advantages over existing methods: It does neither require prior training nor learning, nor knowledge of the camera parameters, nor explicit point correspondences or matching features between image and model. Unlike techniques that estimate a partial 3D pose (as in an overhead view of traffic or machine parts on a conveyor belt), our method estimates the complete 3D pose of the object, and works on a single static image from a given view, and under varying and unknown lighting conditions. For this purpose we derive a novel illumination-invariant distance measure between 2D photo and projected 3D model, which is then minimised to find the best pose parameters. Results for vehicle pose detection are presented.
* 18 LaTeX pages, 7 figures