 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Illumination-Invariant Loss for Monocular 3D Pose Estimation
Nov 28, 2013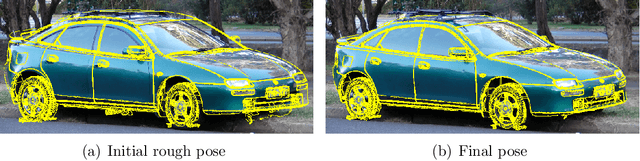
The problem of identifying the 3D pose of a known object from a given 2D image has important applications in Computer Vision. Our proposed method of registering a 3D model of a known object on a given 2D photo of the object has numerous advantages over existing methods. It does not require prior training, knowledge of the camera parameters, explicit point correspondences or matching features between the image and model. Unlike techniques that estimate a partial 3D pose (as in an overhead view of traffic or machine parts on a conveyor belt), our method estimates the complete 3D pose of the object. It works on a single static image from a given view under varying and unknown lighting conditions. For this purpose we derive a novel illumination-invariant distance measure between the 2D photo and projected 3D model, which is then minimised to find the best pose parameters. Results for vehicle pose detection in real photographs are presented.
Featureless 2D-3D Pose Estimation by Minimising an Illumination-Invariant Loss
Nov 03, 2010
The problem of identifying the 3D pose of a known object from a given 2D image has important applications in Computer Vision ranging from robotic vision to image analysis. Our proposed method of registering a 3D model of a known object on a given 2D photo of the object has numerous advantages over existing methods: It does neither require prior training nor learning, nor knowledge of the camera parameters, nor explicit point correspondences or matching features between image and model. Unlike techniques that estimate a partial 3D pose (as in an overhead view of traffic or machine parts on a conveyor belt), our method estimates the complete 3D pose of the object, and works on a single static image from a given view, and under varying and unknown lighting conditions. For this purpose we derive a novel illumination-invariant distance measure between 2D photo and projected 3D model, which is then minimised to find the best pose parameters. Results for vehicle pose detection are presented.
* 18 LaTeX pages, 7 figures
Matching 2-D Ellipses to 3-D Circles with Application to Vehicle Pose Estimation
Dec 18, 2009
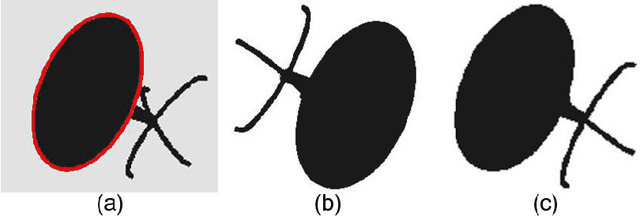

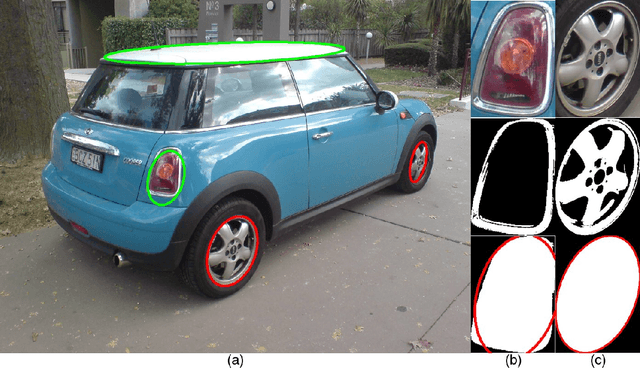
Finding the three-dimensional representation of all or a part of a scene from a single two dimensional image is a challenging task. In this paper we propose a method for identifying the pose and location of objects with circular protrusions in three dimensions from a single image and a 3d representation or model of the object of interest. To do this, we present a method for identifying ellipses and their properties quickly and reliably with a novel technique that exploits intensity differences between objects and a geometric technique for matching an ellipse in 2d to a circle in 3d. We apply these techniques to the specific problem of determining the pose and location of vehicles, particularly cars, from a single image. We have achieved excellent pose recovery performance on artificially generated car images and show promising results on real vehicle images. We also make use of the ellipse detection method to identify car wheels from images, with a very high successful match rate.
* 16 LaTeX pages, 5 figures