 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHITNet: Hierarchical Iterative Tile Refinement Network for Real-time Stereo Matching
Jul 23, 2020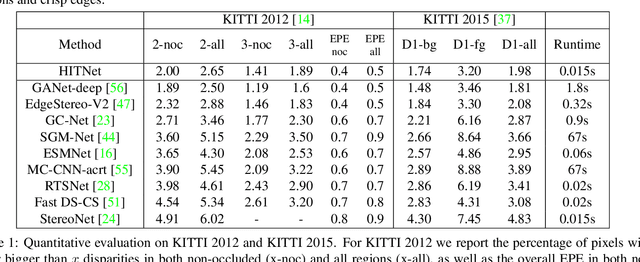
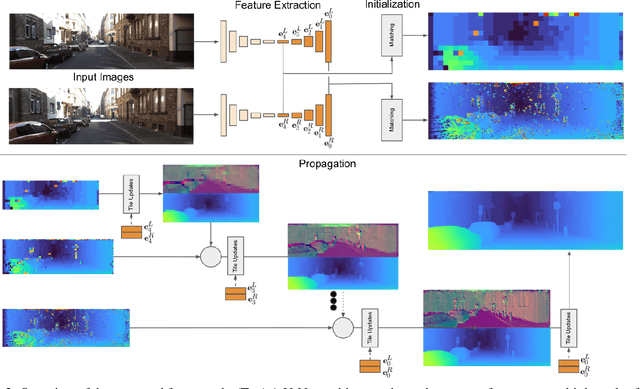

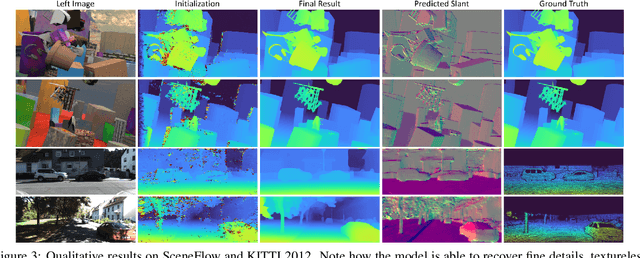
This paper presents HITNet, a novel neural network architecture for real-time stereo matching. Contrary to many recent neural network approaches that operate on a full cost volume and rely on 3D convolutions, our approach does not explicitly build a volume and instead relies on a fast multi-resolution initialization step, differentiable 2D geometric propagation and warping mechanisms to infer disparity hypotheses. To achieve a high level of accuracy, our network not only geometrically reasons about disparities but also infers slanted plane hypotheses allowing to more accurately perform geometric warping and upsampling operations. Our architecture is inherently multi-resolution allowing the propagation of information at different levels. Multiple experiments prove the effectiveness of the proposed approach at a fraction of the computation required by recent state-of-the-art methods. At time of writing, HITNet ranks 1st-3rd on all the metrics published on the ETH3D website for two view stereo and ranks 1st on the popular KITTI 2012 and 2015 benchmarks among the published methods faster than 100ms.
Deep Implicit Volume Compression
May 18, 2020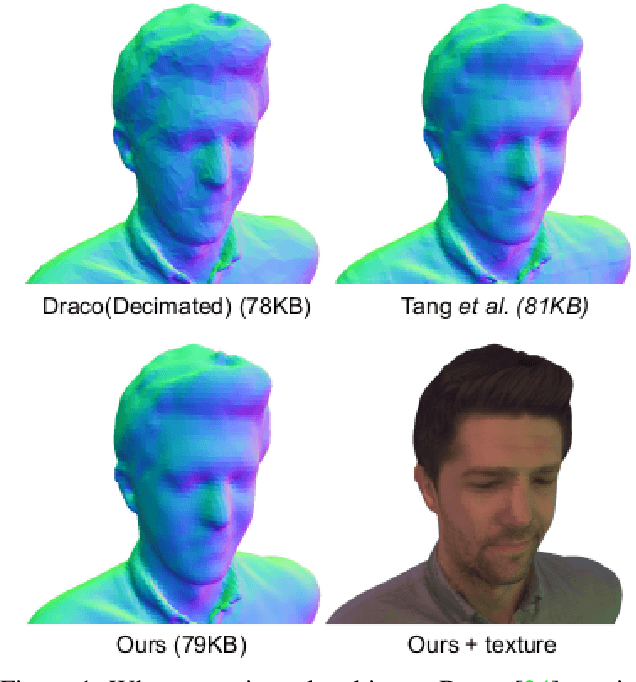
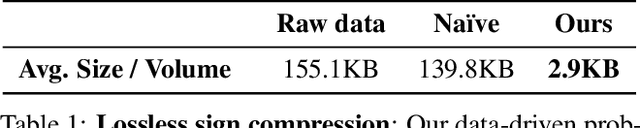
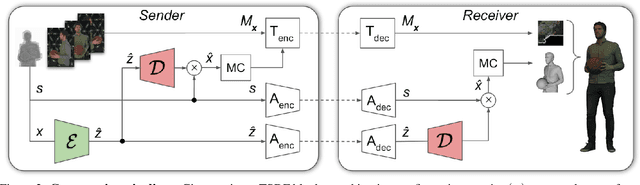
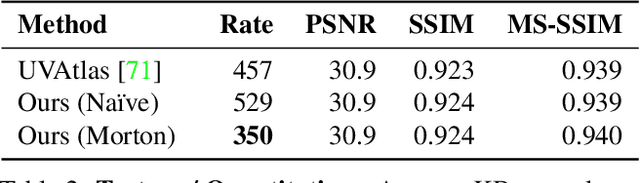
We describe a novel approach for compressing truncated signed distance fields (TSDF) stored in 3D voxel grids, and their corresponding textures. To compress the TSDF, our method relies on a block-based neural network architecture trained end-to-end, achieving state-of-the-art rate-distortion trade-off. To prevent topological errors, we losslessly compress the signs of the TSDF, which also upper bounds the reconstruction error by the voxel size. To compress the corresponding texture, we designed a fast block-based UV parameterization, generating coherent texture maps that can be effectively compressed using existing video compression algorithms. We demonstrate the performance of our algorithms on two 4D performance capture datasets, reducing bitrate by 66% for the same distortion, or alternatively reducing the distortion by 50% for the same bitrate, compared to the state-of-the-art.
RePose: Learning Deep Kinematic Priors for Fast Human Pose Estimation
Feb 10, 2020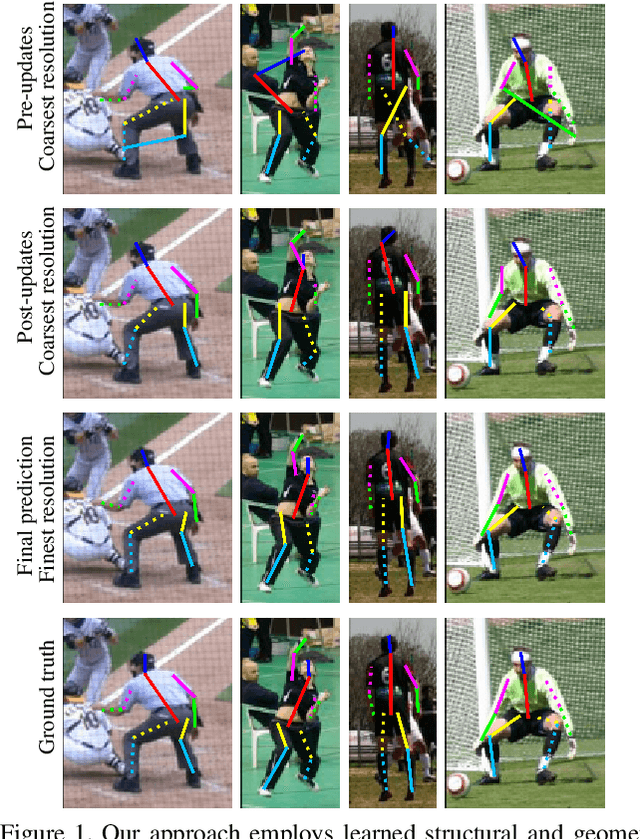
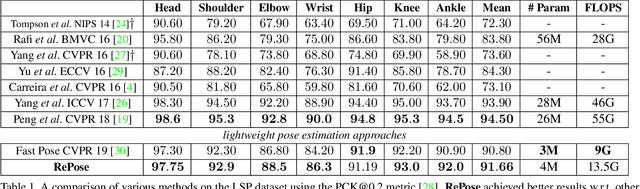
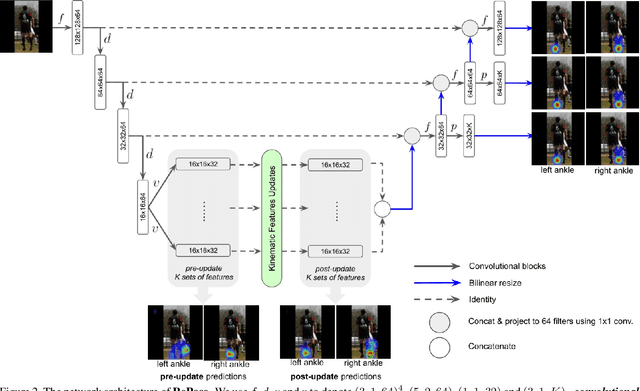
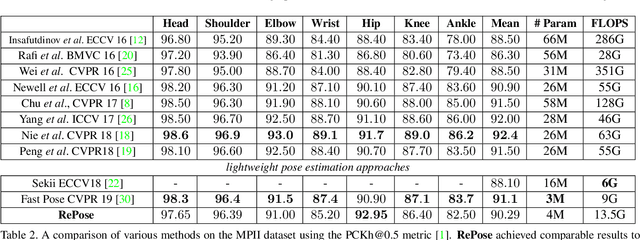
We propose a novel efficient and lightweight model for human pose estimation from a single image. Our model is designed to achieve competitive results at a fraction of the number of parameters and computational cost of various state-of-the-art methods. To this end, we explicitly incorporate part-based structural and geometric priors in a hierarchical prediction framework. At the coarsest resolution, and in a manner similar to classical part-based approaches, we leverage the kinematic structure of the human body to propagate convolutional feature updates between the keypoints or body parts. Unlike classical approaches, we adopt end-to-end training to learn this geometric prior through feature updates from data. We then propagate the feature representation at the coarsest resolution up the hierarchy to refine the predicted pose in a coarse-to-fine fashion. The final network effectively models the geometric prior and intuition within a lightweight deep neural network, yielding state-of-the-art results for a model of this size on two standard datasets, Leeds Sports Pose and MPII Human Pose.
CvxNets: Learnable Convex Decomposition
Sep 12, 2019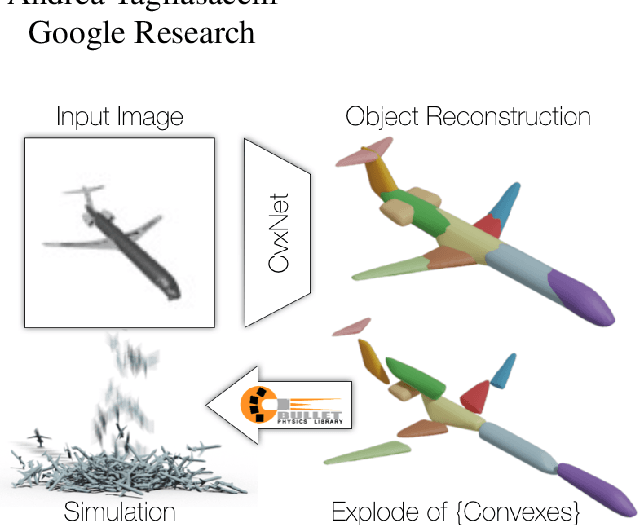
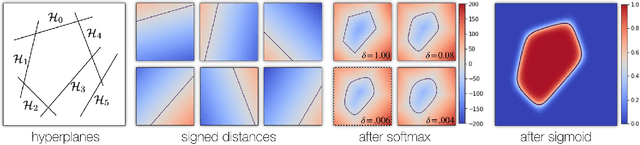
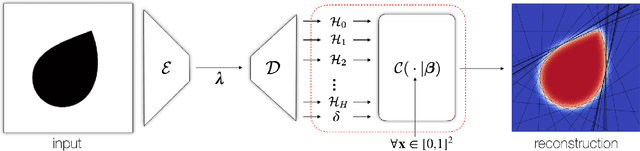
Any solid object can be decomposed into a collection of convex polytopes (in short, convexes). When a small number of convexes are used, such a decomposition can be thought of as a piece-wise approximation of the geometry. This decomposition is fundamental to real-time physics simulation in computer graphics, where it creates a unifying representation of dynamic geometry for collision detection. A convex object also has the property of being simultaneously an explicit and implicit representation: one can interpret it explicitly as a mesh derived by computing the vertices of a convex hull, or implicitly as the collection of half-space constraints or support functions. Their implicit representation makes them particularly well suited for neural network training, as they abstract away from the topology of the geometry they need to represent. We introduce a network architecture to represent a low dimensional family of convexes. This family is automatically derived via an autoencoding process. We investigate the applications of the network including automatic convex decomposition, image to 3D reconstruction, and part-based shape retrieval.
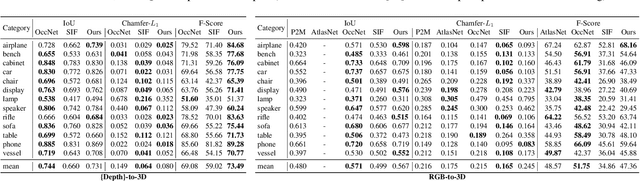
Multiview Aggregation for Learning Category-Specific Shape Reconstruction
Jul 01, 2019
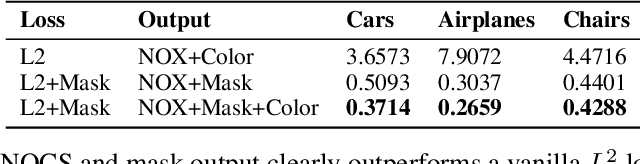
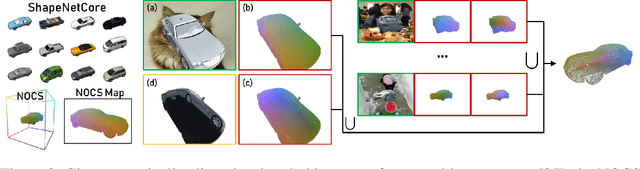
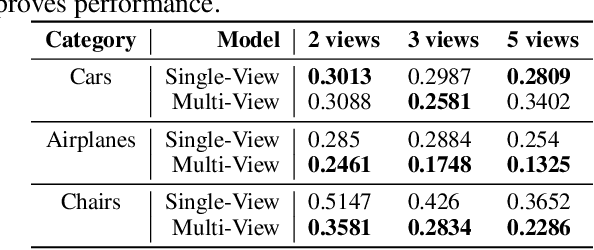
We investigate the problem of learning category-specific 3D surface shape reconstruction from a variable number of RGB views of previously unobserved object instances. Most approaches for multiview shape reconstruction operate on sparse shape representations, or assume a fixed number of views. We present a method that can estimate dense 3D shape, and aggregate shape across multiple and varying number of input views. Given a single input view of an object instance, we propose a representation that encodes the dense shape of the visible object surface parts as well as the surface behind line of sight and occluded by the visible surface. When multiple input views are available, the shape representation is designed to be aggregated into a single 3D shape using an inexpesive union operation. We train a 2D CNN to learn to predict this representation from a variable number of views (1 or more). We further aggregate multiview information by using permutation equivariant layers that promote order-agnostic view information exchange at the feature level. Experiments show that our approach is able to produce dense reconstructions of objects, and is able to produce better results as more views are added.