 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInversion of biological strategies in engineering technology: in case underwater soft robot
Apr 16, 2025This paper proposes a biomimetic design framework based on biological strategy inversion, aiming to systematically map solutions evolved in nature to the engineering field. By constructing a "Function-Behavior-Feature-Environment" (F-B-Cs in E) knowledge model, combined with natural language processing (NLP) and multi-criteria decision-making methods, it achieves efficient conversion from biological strategies to engineering solutions. Using underwater soft robot design as a case study, the effectiveness of the framework in optimizing drive mechanisms, power distribution, and motion pattern design is verified. This research provides scalable methodological support for interdisciplinary biomimetic innovation.
Underwater Soft Robotic Hand with Multi-Source Coupling Bio-Inspired Soft Palm and Six Fingers Driven by Water Hydraulic
Jun 13, 2021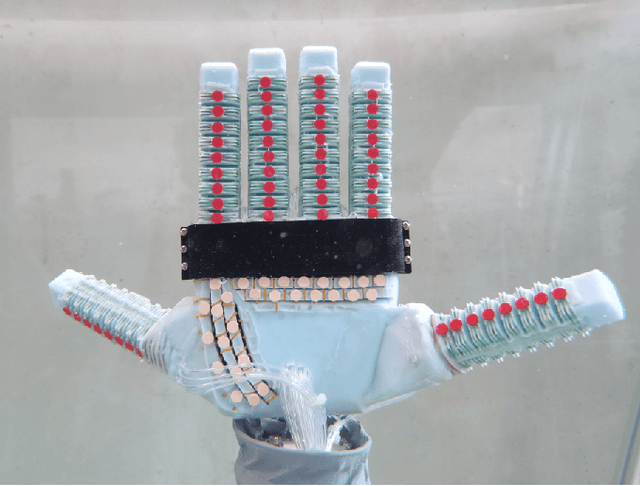
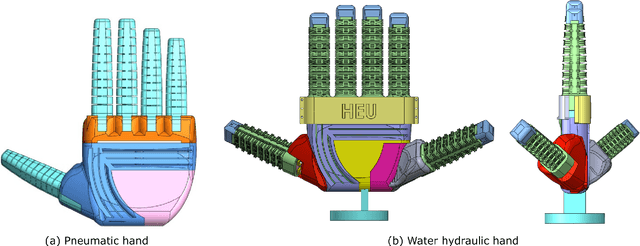
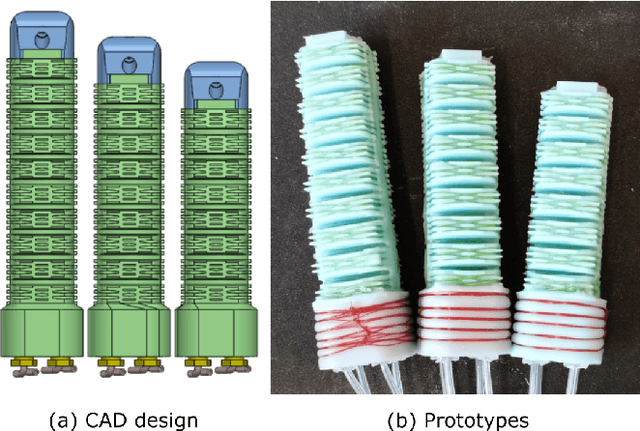
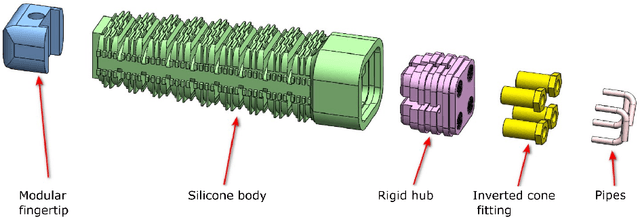
A new fluid-driven soft robot hand in this study uses the idea of the bionics and has the anthropomorphic form, which is oriented to the flexible grasp function. The soft robot hand is composed of a new kind of multi-freedom soft finger and soft palm, which realizes the characteristic grasping function of forehand and backhand. Combined with the fine fluid control system, the soft hand can realize flexible grasping under high pressure, so as to realize flexible grasping operation for different types of target objects in the underwater environment. The soft robot hand was controlled based on water hydraulic platform, Finally, the soft robot hand and the fine fluid control system were connected to form the underwater soft robot hand experiment platform.
Augmented Reality on the Large Scene Based on a Markerless Registration Framework
Mar 07, 2020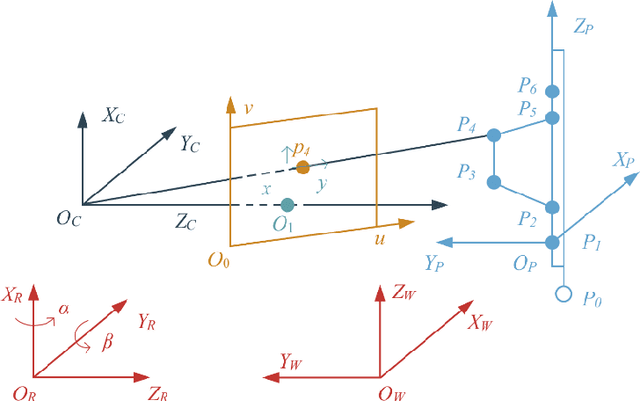

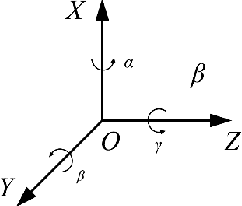
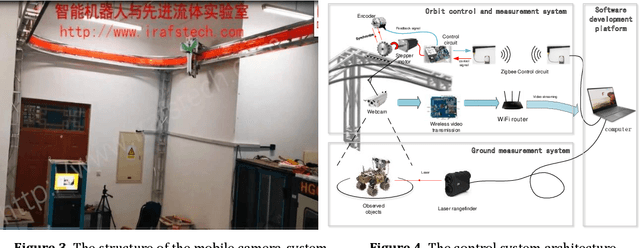
In this paper, a mobile camera positioning method based on forward and inverse kinematics of robot is proposed, which can realize far point positioning of imaging position and attitude tracking in large scene enhancement. Orbit precision motion through the framework overhead cameras and combining with the ground system of sensor array object such as mobile robot platform of various sensors, realize the good 3 d image registration, solve any artifacts that is mobile robot in the large space position initialization problem, effectively implement the large space no marks augmented reality, human-computer interaction, and information summary. Finally, the feasibility and effectiveness of the method are verified by experiments.