 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Set-Theoretic Approach to Multi-Task Execution and Prioritization
Mar 06, 2020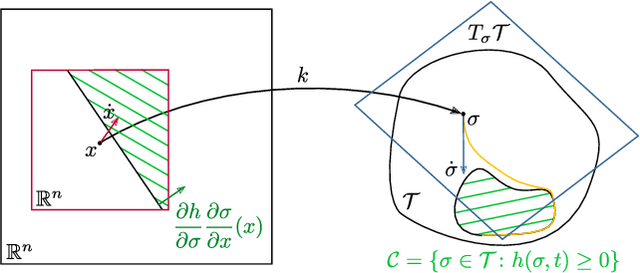
Executing multiple tasks concurrently is important in many robotic applications. Moreover, the prioritization of tasks is essential in applications where safety-critical tasks need to precede application-related objectives, in order to protect both the robot from its surroundings and vice versa. Furthermore, the possibility of switching the priority of tasks during their execution gives the robotic system the flexibility of changing its objectives over time. In this paper, we present an optimization-based task execution and prioritization framework that lends itself to the case of time-varying priorities as well as variable number of tasks. We introduce the concept of extended set-based tasks, encode them using control barrier functions, and execute them by means of a constrained-optimization problem, which can be efficiently solved in an online fashion. Finally, we show the application of the proposed approach to the case of a redundant robotic manipulator.
An Optimal Task Allocation Strategy for Heterogeneous Multi-Robot Systems
Mar 20, 2019

For a team of heterogeneous robots executing multiple tasks, we propose a novel algorithm to optimally allocate tasks to robots while accounting for their different capabilities. Motivated by the need that robot teams have in many real-world applications of remaining operational for long periods of time, we allow each robot to choose tasks taking into account the energy consumed by executing them, besides the global specifications on the task allocation. The tasks are encoded as constraints in an energy minimization problem solved at each point in time by each robot. The prioritization of a task over others -- effectively signifying the allocation of the task to that particular robot -- occurs via the introduction of slack variables in the task constraints. Moreover, the suitabilities of certain robots towards certain tasks are also taken into account to generate a task allocation algorithm for a team of robots with heterogeneous capabilities. The efficacy of the developed approach is demonstrated both in simulation and on a team of real robots.
Voluntary Retreat for Decentralized Interference Reduction in Robot Swarms
Mar 10, 2019
In densely-packed robot swarms operating in confined regions, spatial interference -- which manifests itself as a competition for physical space -- forces robots to spend more time navigating around each other rather than performing the primary task. This paper develops a decentralized algorithm that enables individual robots to decide whether to stay in the region and contribute to the overall mission, or vacate the region so as to reduce the negative effects that interference has on the overall efficiency of the swarm. We develop this algorithm in the context of a distributed collection task, where a team of robots collect and deposit objects from one set of locations to another in a given region. Robots do not communicate and use only binary information regarding the presence of other robots around them to make the decision to stay or retreat. We illustrate the efficacy of the algorithm with experiments on a team of real robots.
A Study of a Class of Vibration-Driven Robots: Modeling, Analysis, Control and Design of the Brushbot
Mar 02, 2019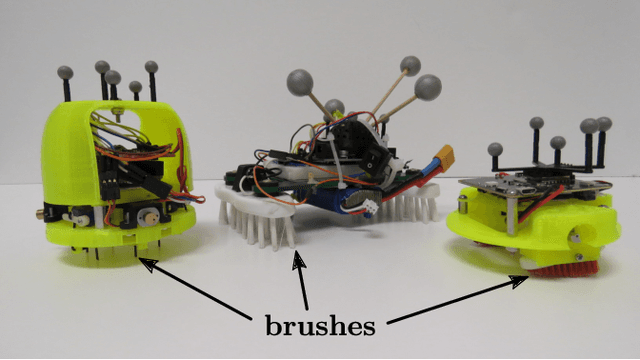

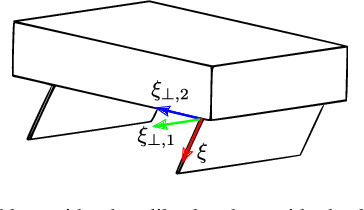
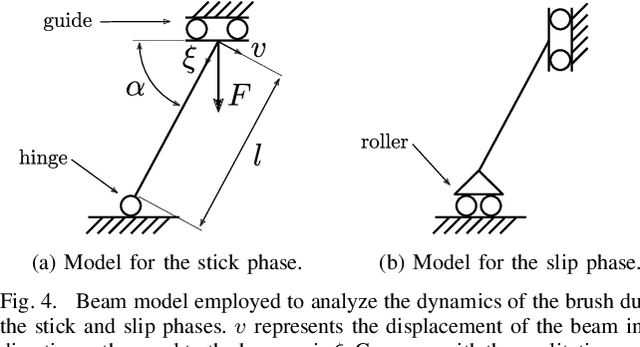
In this paper we present a study of a specific class of vibration-driven robots: the brushbots. In a bottom-up fashion, we start by deriving dynamic models of the brushes and we discuss the conditions under which these models can be employed to describe the motion of brushbots. Then, we present two designs of brushbots: a fully-actuated platform and a differential-drive-like one. The former is employed to experimentally validate both the developed theoretical models and the devised motion control algorithms. Finally, a coordinated-control algorithm is implemented on a swarm of differential-drive-like brushbots in order to demonstrate the design simplicity and robustness that can be achieved employing a vibration-based locomotion strategy.
Non-Uniform Robot Densities in Vibration Driven Swarms Using Phase Separation Theory
Mar 02, 2019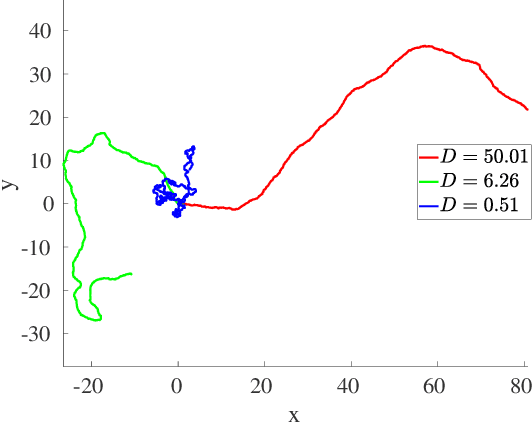
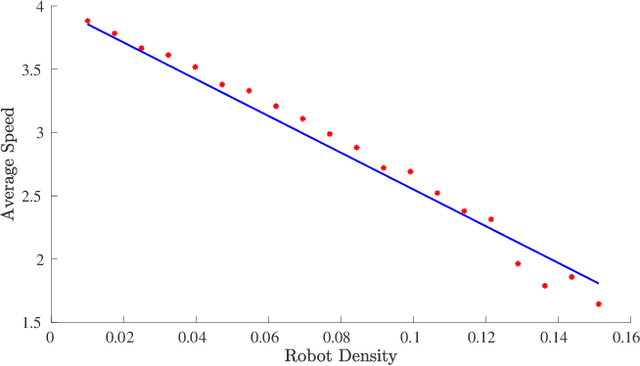
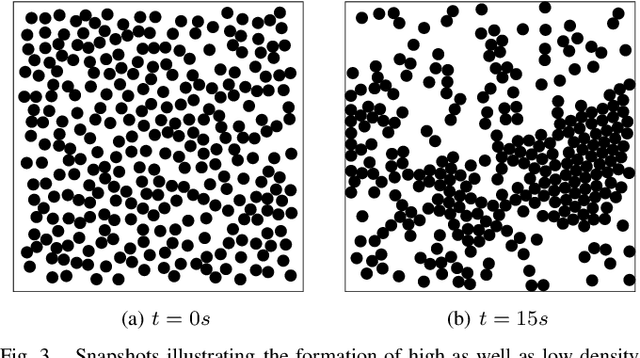
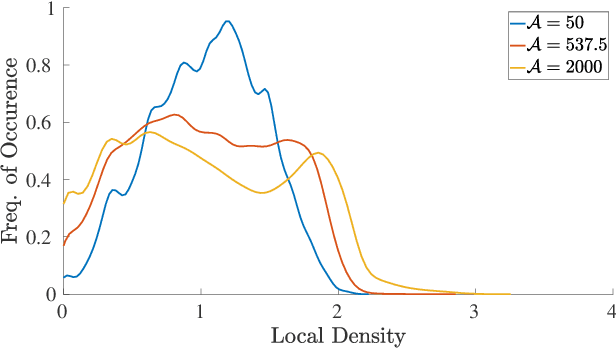
In robot swarms operating under highly restrictive sensing and communication constraints, individuals may need to use direct physical proximity to facilitate information exchange. However, in certain task-related scenarios, this requirement might conflict with the need for robots to spread out in the environment, e.g., for distributed sensing or surveillance applications. This paper demonstrates how a swarm of minimally-equipped robots can form high-density robot aggregates which coexist with lower robot densities in the domain. We envision a scenario where a swarm of vibration-driven robots---which sit atop bristles and achieve directed motion by vibrating them---move somewhat randomly in an environment while colliding with each other. Theoretical techniques from the study of far-from-equilibrium collectives and statistical mechanics clarify the mechanisms underlying the formation of these high and low density regions. Specifically, we capitalize on a transformation that connects the collective properties of a system of self-propelled particles with that of a well-studied molecular fluid system, thereby inheriting the rich theory of equilibrium thermodynamics. This connection is a formal one and is a relatively recent result in studies of motility induced phase separation; it is previously unexplored in the context of robotics. Real robot experiments as well as simulations illustrate how inter-robot collisions can precipitate the formation of non-uniform robot densities in a closed and bounded region.
Safe Open-Loop Strategies for Handling Intermittent Communications in Multi-Robot Systems
Feb 11, 2017
In multi-robot systems where a central decision maker is specifying the movement of each individual robot, a communication failure can severely impair the performance of the system. This paper develops a motion strategy that allows robots to safely handle critical communication failures for such multi-robot architectures. For each robot, the proposed algorithm computes a time horizon over which collisions with other robots are guaranteed not to occur. These safe time horizons are included in the commands being transmitted to the individual robots. In the event of a communication failure, the robots execute the last received velocity commands for the corresponding safe time horizons leading to a provably safe open-loop motion strategy. The resulting algorithm is computationally effective and is agnostic to the task that the robots are performing. The efficacy of the strategy is verified in simulation as well as on a team of differential-drive mobile robots.