 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHome Health System Deployment Experience for Geriatric Care Remote Monitoring
Jan 24, 2026To support aging-in-place, adult children often provide care to their aging parents from a distance. These informal caregivers desire plug-and-play remote care solutions for privacy-preserving continuous monitoring that enabling real-time activity monitoring and intuitive, actionable information. This short paper presents insights from three iterations of deployment experience for remote monitoring system and the iterative improvement in hardware, modeling, and user interface guided by the Geriatric 4Ms framework (matters most, mentation, mobility, and medication). An LLM-assisted solution is developed to balance user experience (privacy-preserving, plug-and-play) and system performance.
RARR : Robust Real-World Activity Recognition with Vibration by Scavenging Near-Surface Audio Online
Aug 28, 2025



One in four people dementia live alone, leading family members to take on caregiving roles from a distance. Many researchers have developed remote monitoring solutions to lessen caregiving needs; however, limitations remain including privacy preserving solutions, activity recognition, and model generalizability to new users and environments. Structural vibration sensor systems are unobtrusive solutions that have been proven to accurately monitor human information, such as identification and activity recognition, in controlled settings by sensing surface vibrations generated by activities. However, when deploying in an end user's home, current solutions require a substantial amount of labeled data for accurate activity recognition. Our scalable solution adapts synthesized data from near-surface acoustic audio to pretrain a model and allows fine tuning with very limited data in order to create a robust framework for daily routine tracking.
A Survey of Foundation Models for IoT: Taxonomy and Criteria-Based Analysis
Jun 13, 2025


Foundation models have gained growing interest in the IoT domain due to their reduced reliance on labeled data and strong generalizability across tasks, which address key limitations of traditional machine learning approaches. However, most existing foundation model based methods are developed for specific IoT tasks, making it difficult to compare approaches across IoT domains and limiting guidance for applying them to new tasks. This survey aims to bridge this gap by providing a comprehensive overview of current methodologies and organizing them around four shared performance objectives by different domains: efficiency, context-awareness, safety, and security & privacy. For each objective, we review representative works, summarize commonly-used techniques and evaluation metrics. This objective-centric organization enables meaningful cross-domain comparisons and offers practical insights for selecting and designing foundation model based solutions for new IoT tasks. We conclude with key directions for future research to guide both practitioners and researchers in advancing the use of foundation models in IoT applications.
Graph-Based Physics-Guided Urban PM2.5 Air Quality Imputation with Constrained Monitoring Data
Jun 07, 2025This work introduces GraPhy, a graph-based, physics-guided learning framework for high-resolution and accurate air quality modeling in urban areas with limited monitoring data. Fine-grained air quality monitoring information is essential for reducing public exposure to pollutants. However, monitoring networks are often sparse in socioeconomically disadvantaged regions, limiting the accuracy and resolution of air quality modeling. To address this, we propose a physics-guided graph neural network architecture called GraPhy with layers and edge features designed specifically for low-resolution monitoring data. Experiments using data from California's socioeconomically disadvantaged San Joaquin Valley show that GraPhy achieves the overall best performance evaluated by mean squared error (MSE), mean absolute error (MAE), and R-square value (R2), improving the performance by 9%-56% compared to various baseline models. Moreover, GraPhy consistently outperforms baselines across different spatial heterogeneity levels, demonstrating the effectiveness of our model design.
* Accepted by ACM Transactions on Sensor Networks (TOSN) 2025
LaNet: Real-time Lane Identification by Learning Road SurfaceCharacteristics from Accelerometer Data
Apr 06, 2020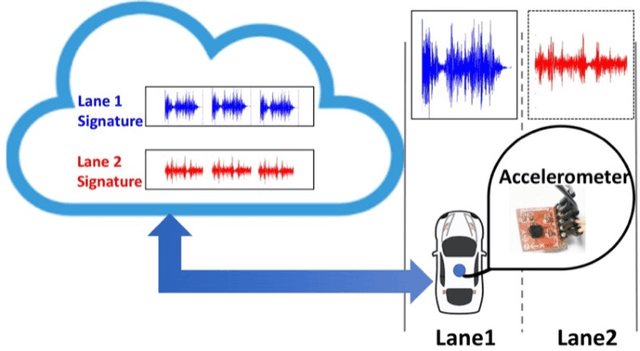
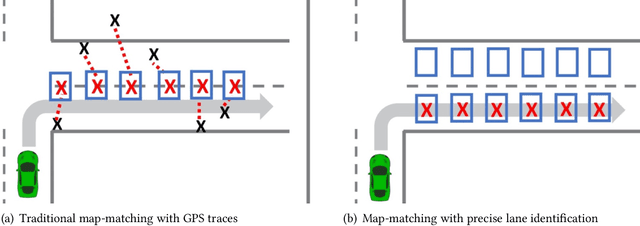
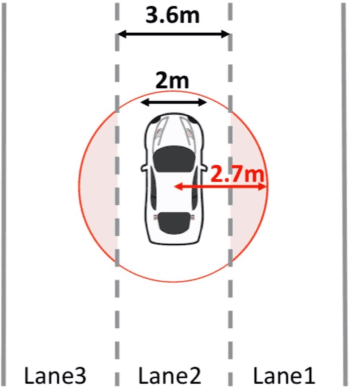
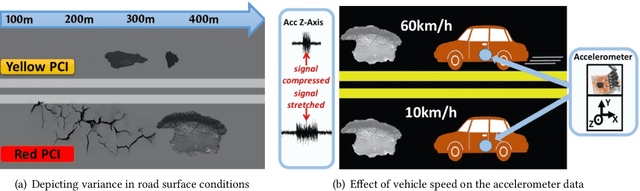
The resolution of GPS measurements, especially in urban areas, is insufficient for identifying a vehicle's lane. In this work, we develop a deep LSTM neural network model LaNet that determines the lane vehicles are on by periodically classifying accelerometer samples collected by vehicles as they drive in real time. Our key finding is that even adjacent patches of road surfaces contain characteristics that are sufficiently unique to differentiate between lanes, i.e., roads inherently exhibit differing bumps, cracks, potholes, and surface unevenness. Cars can capture this road surface information as they drive using inexpensive, easy-to-install accelerometers that increasingly come fitted in cars and can be accessed via the CAN-bus. We collect an aggregate of 60 km driving data and synthesize more based on this that capture factors such as variable driving speed, vehicle suspensions, and accelerometer noise. Our formulated LSTM-based deep learning model, LaNet, learns lane-specific sequences of road surface events (bumps, cracks etc.) and yields 100% lane classification accuracy with 200 meters of driving data, achieving over 90% with just 100 m (correspondingly to roughly one minute of driving). We design the LaNet model to be practical for use in real-time lane classification and show with extensive experiments that LaNet yields high classification accuracy even on smooth roads, on large multi-lane roads, and on drives with frequent lane changes. Since different road surfaces have different inherent characteristics or entropy, we excavate our neural network model and discover a mechanism to easily characterize the achievable classification accuracies in a road over various driving distances by training the model just once. We present LaNet as a low-cost, easily deployable and highly accurate way to achieve fine-grained lane identification.