 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe First Challenge on Remote Sensing Infrared Image Super-Resolution at NTIRE 2026: Benchmark Results and Method Overview
Apr 23, 2026This paper presents the NTIRE 2026 Remote Sensing Infrared Image Super-Resolution (x4) Challenge, one of the associated challenges of NTIRE 2026. The challenge aims to recover high-resolution (HR) infrared images from low-resolution (LR) inputs generated through bicubic downsampling with a x4 scaling factor. The objective is to develop effective models or solutions that achieve state-of-the-art performance for infrared image SR in remote sensing scenarios. To reflect the characteristics of infrared data and practical application needs, the challenge adopts a single-track setting. A total of 115 participants registered for the competition, with 13 teams submitting valid entries. This report summarizes the challenge design, dataset, evaluation protocol, main results, and the representative methods of each team. The challenge serves as a benchmark to advance research in infrared image super-resolution and promote the development of effective solutions for real-world remote sensing applications.
GridNet-HD: A High-Resolution Multi-Modal Dataset for LiDAR-Image Fusion on Power Line Infrastructure
Jan 19, 2026This paper presents GridNet-HD, a multi-modal dataset for 3D semantic segmentation of overhead electrical infrastructures, pairing high-density LiDAR with high-resolution oblique imagery. The dataset comprises 7,694 images and 2.5 billion points annotated into 11 classes, with predefined splits and mIoU metrics. Unimodal (LiDAR-only, image-only) and multi-modal fusion baselines are provided. On GridNet-HD, fusion models outperform the best unimodal baseline by +5.55 mIoU, highlighting the complementarity of geometry and appearance. As reviewed in Sec. 2, no public dataset jointly provides high-density LiDAR and high-resolution oblique imagery with 3D semantic labels for power-line assets. Dataset, baselines, and codes are available: https://huggingface.co/collections/heig-vd-geo/gridnet-hd.
CrossLoc: Scalable Aerial Localization Assisted by Multimodal Synthetic Data
Dec 16, 2021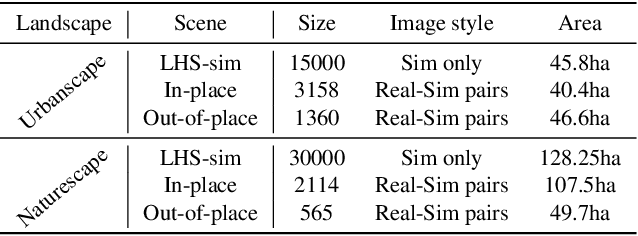
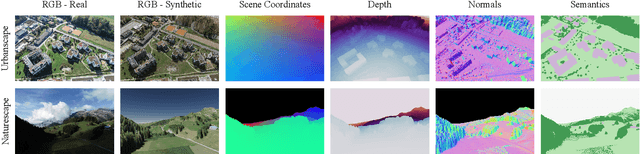
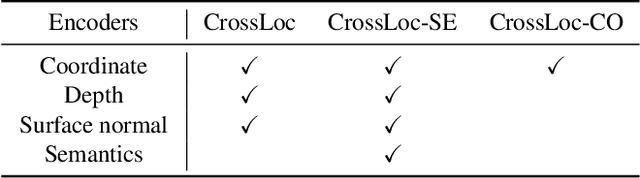
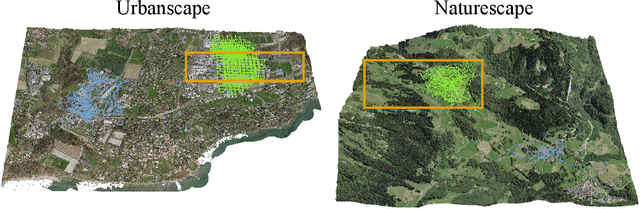
We present a visual localization system that learns to estimate camera poses in the real world with the help of synthetic data. Despite significant progress in recent years, most learning-based approaches to visual localization target at a single domain and require a dense database of geo-tagged images to function well. To mitigate the data scarcity issue and improve the scalability of the neural localization models, we introduce TOPO-DataGen, a versatile synthetic data generation tool that traverses smoothly between the real and virtual world, hinged on the geographic camera viewpoint. New large-scale sim-to-real benchmark datasets are proposed to showcase and evaluate the utility of the said synthetic data. Our experiments reveal that synthetic data generically enhances the neural network performance on real data. Furthermore, we introduce CrossLoc, a cross-modal visual representation learning approach to pose estimation that makes full use of the scene coordinate ground truth via self-supervision. Without any extra data, CrossLoc significantly outperforms the state-of-the-art methods and achieves substantially higher real-data sample efficiency. Our code is available at https://github.com/TOPO-EPFL/CrossLoc.