 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Evaluation of Human Arm Operations Using IMU Sensors with a Spring-Damper-Mass Predictive Model
Feb 13, 2025This paper presents a novel approach to real-time safety monitoring in human-robot collaborative manufacturing environments through a wrist-mounted Inertial Measurement Unit (IMU) system integrated with a Predictive Safety Model (PSM). The proposed system extends previous PSM implementations through the adaptation of a spring-damper-mass model specifically optimized for wrist motions, employing probabilistic safety assessment through impedance-based computations. We analyze our proposed impedance-based safety approach with frequency domain methods, establishing quantitative safety thresholds through comprehensive comparative analysis. Experimental validation across three manufacturing tasks - tool manipulation, visual inspection, and pick-and-place operations. Results show robust performance across diverse manufacturing scenarios while maintaining computational efficiency through optimized parameter selection. This work establishes a foundation for future developments in adaptive risk assessment in real-time for human-robot collaborative manufacturing environments.
A Survey on Path Planning Problem of Rolling Contacts: Approaches, Applications and Future Challenges
Jan 08, 2025This paper explores an eclectic range of path-planning methodologies engineered for rolling surfaces. Our focus is on the kinematic intricacies of rolling contact systems, which are investigated through a motion planning lens. Beyond summarizing the approaches to single-contact rotational surfaces, we explore the challenging domain of spin-rolling multi-contact systems. Our work proposes solutions for the higher-dimensional problem of multiple rotating objects in contact. Venturing beyond kinematics, these methodologies find application across a spectrum of domains, including rolling robots, reconfigurable swarm robotics, micro/nano manipulation, and nonprehensile manipulations. Through meticulously examining established planning strategies, we unveil their practical implementations in various real-world scenarios, from intricate dexterous manipulation tasks to the nimble manoeuvring of rolling robots and even shape planning of multi-contact swarms of particles. This study introduces the persistent challenges and unexplored frontiers of robotics, intricately linked to both path planning and mechanism design. As we illuminate existing solutions, we also set the stage for future breakthroughs in this dynamic and rapidly evolving field by highlighting the critical importance of addressing rolling contact problems.
Development of Underactuated Geometric Compliant (UGC) Module with Variable Radial for Robotic Applications
Nov 08, 2024This paper introduces a novel underactuated geometric compliant (UGC) robot and investigates the behaviors of underactuated compliant modules with variable radial stiffness, aiming to enhance the versatility and functionality of UGC robots. We initiate the study by designing and fabricating various compliant semi-rigid geometric joints, each tailored to a specific design objective. These joints undergo physical testing to validate their stiffness characteristics and returnable angles as durability factors. Subsequently, we develop a mathematical model based on Gaussian process regression to incorporate the different geometric joint characteristics, including thickness, facilitating the development of fully functional prototypes with easy-to-3D print models. After analyzing individual joints, we present various configurational combinations to construct the overall UGC module for robotics applications. Our final prototype UGC can dynamically alter its radius, reducing to 80-85\% of its original value while maintaining structural integrity and operational efficiency. This study discusses potential abilities, challenges, and limitations associated with employing UGC modules, offering valuable insights for future research and developments in UGC robotics.
Novel Non-Prehensile Rolling Problem: Modelling and Balance Control of Pendulum-Driven Reconfigurable Disks Motion with Magnetic Coupling in Simulation
Nov 06, 2024This paper presents a novel type of mobile rolling robot designed as a modular platform for non-prehensile manipulation, highlighting the associated control challenges in achieving balancing control of the robotic system. The developed rolling disk modules incorporate an innovative internally actuated magnetic-pendulum coupling mechanism, which introduces a compelling control problem due to the frictional and sliding interactions, as well as the magnetic effects between each module. In this paper, we derive the nonlinear dynamics of the robot using the Euler-Lagrange formulation. Then, through simulation, the motion behavior of the system is studied and analyzed, providing critical insights for future investigations into control methods for complex non-prehensile motion between robotic modules. Also, we study the balancing of this new platform and introduce a new motion pattern of lifting. This research aims to enhance the understanding and implementation of modular self-reconfigurable robots in various scenarios for future applications.
MonoRollBot: 3-DOF Spherical Robot with Underactuated Single Compliant Actuator Design
Nov 06, 2024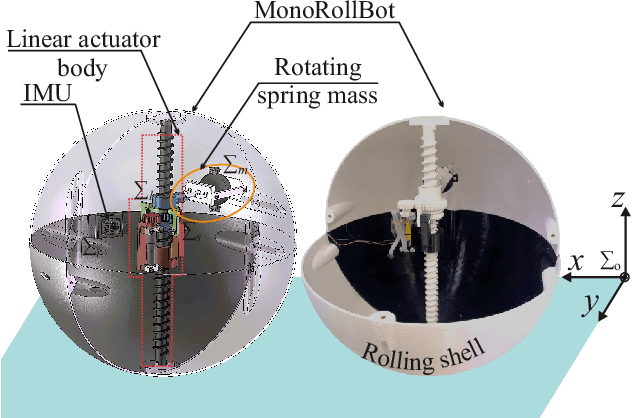
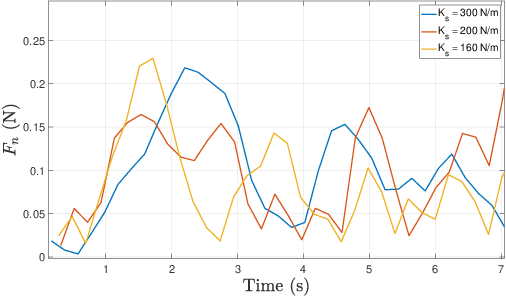
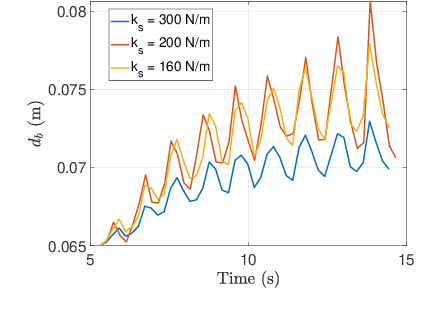
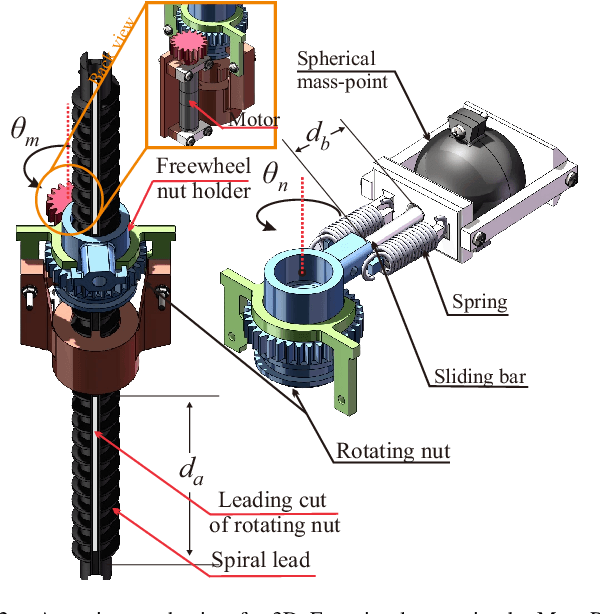
Spherical rolling robots have garnered significant attention in the field of mobile robotics for applications such as inspection and space exploration. Designing underactuated rolling robots poses challenges in achieving multi-directional propulsion with high degrees of freedom while utilizing a limited number of actuators. This paper presents the MonoRollBot, a novel 3-degree-of-freedom (DOF) spherical robot that utilizes an underactuated mechanism driven by only a single spring-motor system. Unlike conventional spherical robots, MonoRollBot employs a minimalist actuation approach, relying on only one motor and a passive spring to control its locomotion. The robot achieves 3-DOF motion through an innovative coupling of spring dynamics and motor control. In this work, we detail the design of the MonoRollBot and evaluate its motion capabilities through design studies. We also do studies on its locomotion behaviours based on changes in rotating mass and stiffness properties.
Design and Motion Analysis of a Reconfigurable Pendulum-Based Rolling Disk Robot with Magnetic Coupling
Oct 30, 2024Reconfigurable robots are at the forefront of robotics innovation due to their unmatched versatility and adaptability in addressing various tasks through collaborative operations. This paper explores the design and implementation of a novel pendulum-based magnetic coupling system within a reconfigurable disk robot. Diverging from traditional designs, this system emphasizes enhancing coupling strength while maintaining the compactness of the outer shell. We employ parametric optimization techniques, including magnetic array simulations, to improve coupling performance. Additionally, we conduct a comprehensive analysis of the rolling robot's motion to assess its operational effectiveness in the coupling mechanism. This examination reveals intriguing new motion patterns driven by frictional and sliding effects between the rolling disk modules and the ground. Furthermore, the new setup introduces a novel problem in the area of nonprehensile manipulation.
AutomaChef: A Physics-informed Demonstration-guided Learning Framework for Granular Material Manipulation
Jun 13, 2024Due to the complex physical properties of granular materials, research on robot learning for manipulating such materials predominantly either disregards the consideration of their physical characteristics or uses surrogate models to approximate their physical properties. Learning to manipulate granular materials based on physical information obtained through precise modelling remains an unsolved problem. In this paper, we propose to address this challenge by constructing a differentiable physics simulator for granular materials based on the Taichi programming language and developing a learning framework accelerated by imperfect demonstrations that are generated via gradient-based optimisation on non-granular materials through our simulator. Experimental results show that our method trains three policies that, when chained, are capable of executing the task of transporting granular materials in both simulated and real-world scenarios, which existing popular deep reinforcement learning models fail to accomplish.
PSM: A Predictive Safety Model for Body Motion Based On the Spring-Damper Pendulum
Jul 29, 2022
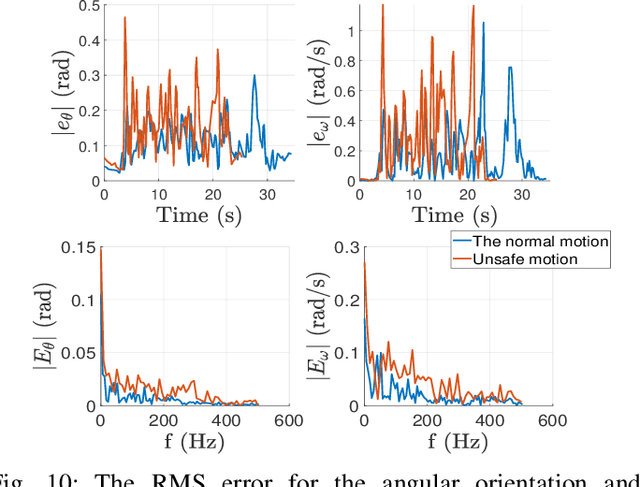
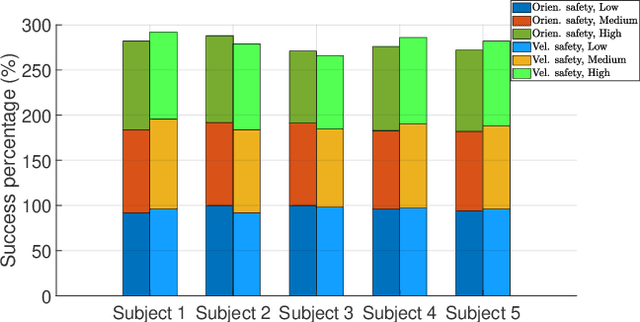
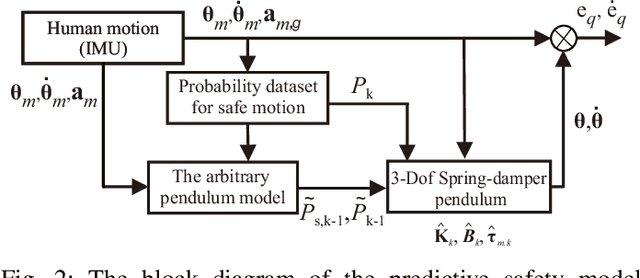
Quantifying the safety of the human body orientation is an important issue in human-robot interaction. Knowing the changing physical constraints on human motion can improve inspection of safe human motions and bring essential information about stability and normality of human body orientations with real-time risk assessment. Also, this information can be used in cooperative robots and monitoring systems to evaluate and interact in the environment more freely. Furthermore, the workspace area can be more deterministic with the known physical characteristics of safety. Based on this motivation, we propose a novel predictive safety model (PSM) that relies on the information of an inertial measurement unit on the human chest. The PSM encompasses a 3-Dofs spring-damper pendulum model that predicts human motion based on a safe motion dataset. The estimated safe orientation of humans is obtained by integrating a safety dataset and an elastic spring-damper model in a way that the proposed approach can realize complex motions at different safety levels. We did experiments in a real-world scenario to verify our novel proposed model. This novel approach can be used in different guidance/assistive robots and health monitoring systems to support and evaluate the human condition, particularly elders.
Discretization and Stabilization of Energy-Based Controller for Period Switching Control and Flexible Scheduling
Jun 13, 2022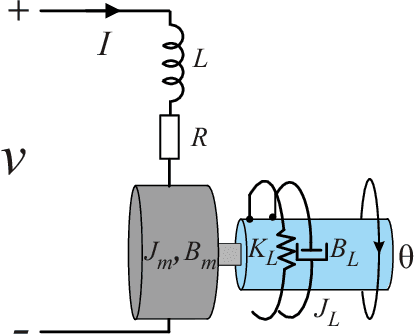
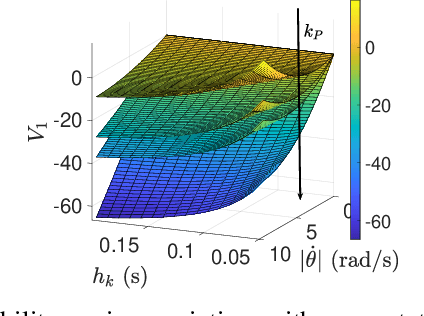
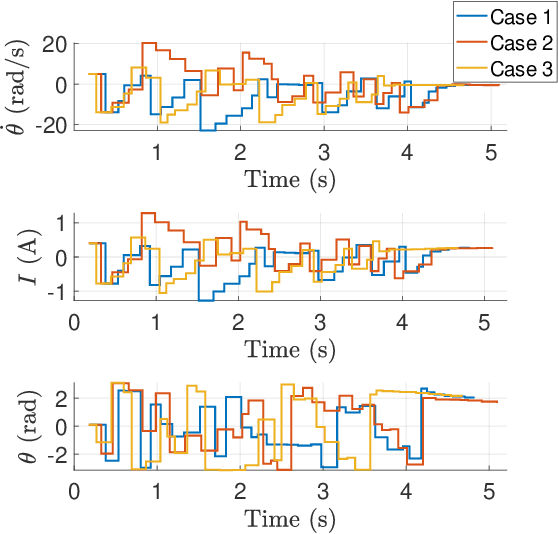
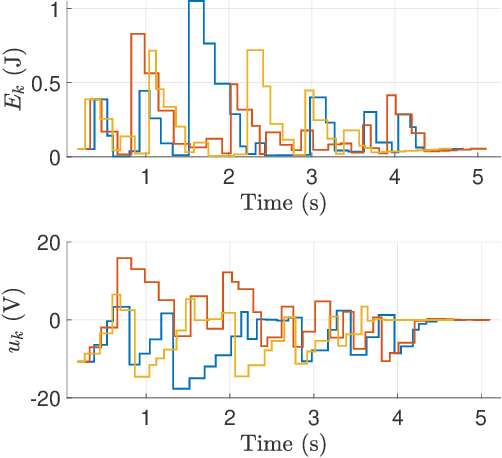
Emerging advanced control applications, with increased complexity in software but limited computing resources, suggest that real-time controllers should have adaptable designs. These control strategies also should be designed with consideration of the run-time behavior of the system. One of such research attempts is to design the controller along with the task scheduler, known as control-scheduling co-design, for more predictable timing behavior as well as surviving system overloads. Unlike traditional controller designs, which have equal-distance sampling periods, the co-design approach increases the system flexibility and resilience by explicitly considering timing properties, for example using an event-based controller or with multiple sampling times (non-uniform sampling and control). Within this context, we introduce the first work on the discretization of an energy-based controller that can switch arbitrarily between multiple periods and adjust the control parameters accordingly without destabilizing the system. A digital controller design based on this paradigm for a DC motor with an elastic load as an example is introduced and the stability condition is given based on the proposed Lyapunov function. The method is evaluated with various computer-based simulations which demonstrate its effectiveness.
A Novel Assistive Controller Based on Differential Geometry for Users of the Differential-Drive Wheeled Mobile Robots
Feb 04, 2022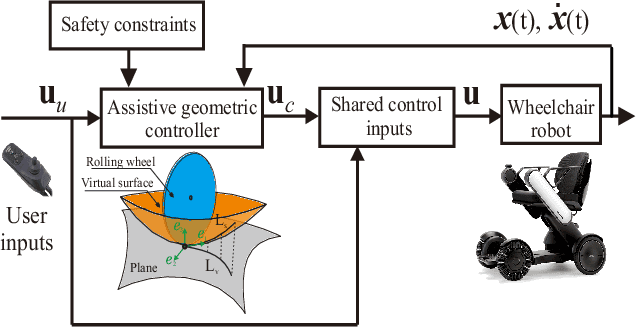
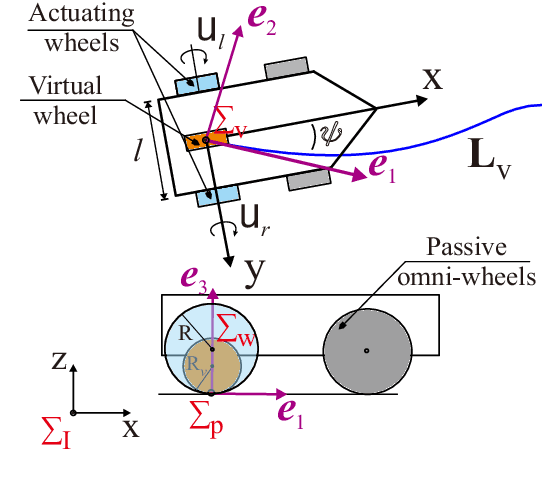
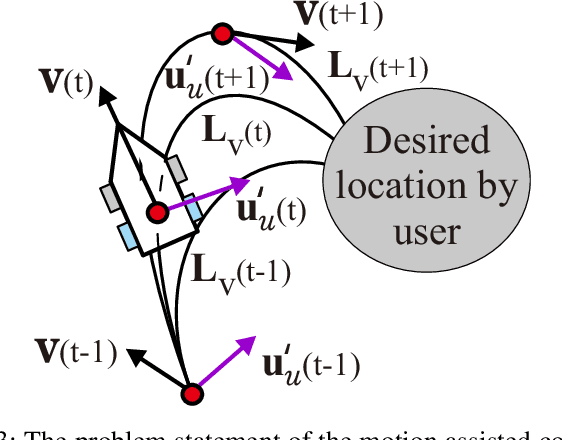
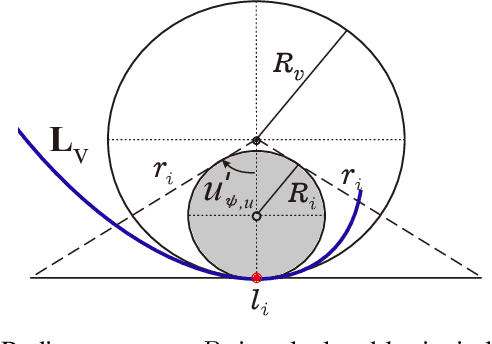
Certain wheeled mobile robots e.g., electric wheelchairs, can operate through indirect joystick controls from users. Correct steering angle becomes essential when the user should determine the vehicle direction and velocity, in particular for differential wheeled vehicles since the vehicle velocity and direction are controlled with only two actuating wheels. This problem gets more challenging when complex curves should be realized by the user. A novel assistive controller with safety constraints is needed to address these problems. Also, the classic control methods mostly require the desired states beforehand which completely contradicts human's spontaneous decisions on the desired location to go. In this work, we develop a novel assistive control strategy based on differential geometry relying on only joystick inputs and vehicle states where the controller does not require any desired states. We begin with explaining the vehicle kinematics and our designed Darboux frame kinematics on a contact point of a virtual wheel and plane. Next, the geometric controller using the Darboux frame kinematics is designed for having smooth trajectories under certain safety constraints. We experiment our approach with different participants and evaluate its performance in various routes.