 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhase-Conditioned Imitation Learning with Autonomous Failure Recovery for Robust Deformable Object Manipulation
May 28, 2026This paper presents a phase-conditioned, force-aware framework for robust deformable object manipulation. Standard imitation learning policies such as Action Chunking with Transformers (ACT) rely on a Markovian assumption at inference, causing state aliasing when visually similar observations require contradictory actions and preventing autonomous recovery from execution failures. We address this with a closed-loop hierarchical architecture. A FiLM-conditioned ACT encoder modulates feature extraction based on the current task phase, enabling a single unified policy to produce phase-specific behaviors while sharing action dynamics across phases. A multi-modal phase predictor fusing visual, force, and pose feedback estimates the phase in real time, detecting contact failures that are invisible to vision alone and autonomously triggering recovery trajectories. The system is completed by a hybrid impedance controller for compliant execution and a haptic teleoperation interface for force-aware data collection. Ablation studies show that FiLM-based modulation significantly outperforms both unconditioned and token-level conditioned baselines, and t-SNE analysis confirms that FiLM induces well-separated, phase-specific feature representations. Validated on hanging and removing a T-shirt with dual arms, the closed-loop system improves the hanging success rate from 56\% to 87\% through autonomous error recovery. Code and videos: https://leledeyuan00.github.io/phaser/
Perception of Social Robots as Communication Partners in Healthcare for Older Adults
May 20, 2026Addressing the global caregiver shortage through socially assistive robots necessitates a deep understanding of their psychological and physiological impacts on older adults during human-robot interaction (HRI). This study addresses whether social robots can serve as effective interaction partners compared to humans, and if "positive prompts" can similarly enhance these interactions. We conducted a comparative study with 35 participants (aged 70+). Our multi-modal analysis, integrating facial expression data, heart rate variability, and subjective questionnaires, revealed no significant differences in overall stress levels between human and robot interactions. Facial expression analysis confirmed that the robot was accepted as a valid interaction partner, while physiological data showed slightly lower heart rates during robot interactions, suggesting a more relaxed state compared to human-led sessions. These findings indicate that social robots can engage older adults without inducing psychological strain and are capable of alleviating caregiver burden by performing structured tasks, such as health-sensing surveys. Future work should address the identified "appearance-content mismatch" in robot design to facilitate even more natural and effective interactions.
A Standing Support Mobility Robot for Enhancing Independence in Elderly Daily Living
Aug 27, 2025



This paper presents a standing support mobility robot "Moby" developed to enhance independence and safety for elderly individuals during daily activities such as toilet transfers. Unlike conventional seated mobility aids, the robot maintains users in an upright posture, reducing physical strain, supporting natural social interaction at eye level, and fostering a greater sense of self-efficacy. Moby offers a novel alternative by functioning both passively and with mobility support, enabling users to perform daily tasks more independently. Its main advantages include ease of use, lightweight design, comfort, versatility, and effective sit-to-stand assistance. The robot leverages the Robot Operating System (ROS) for seamless control, featuring manual and autonomous operation modes. A custom control system enables safe and intuitive interaction, while the integration with NAV2 and LiDAR allows for robust navigation capabilities. This paper reviews existing mobility solutions and compares them to Moby, details the robot's design, and presents objective and subjective experimental results using the NASA-TLX method and time comparisons to other methods to validate our design criteria and demonstrate the advantages of our contribution.
Context-Aware Risk Estimation in Home Environments: A Probabilistic Framework for Service Robots
Aug 27, 2025



We present a novel framework for estimating accident-prone regions in everyday indoor scenes, aimed at improving real-time risk awareness in service robots operating in human-centric environments. As robots become integrated into daily life, particularly in homes, the ability to anticipate and respond to environmental hazards is crucial for ensuring user safety, trust, and effective human-robot interaction. Our approach models object-level risk and context through a semantic graph-based propagation algorithm. Each object is represented as a node with an associated risk score, and risk propagates asymmetrically from high-risk to low-risk objects based on spatial proximity and accident relationship. This enables the robot to infer potential hazards even when they are not explicitly visible or labeled. Designed for interpretability and lightweight onboard deployment, our method is validated on a dataset with human-annotated risk regions, achieving a binary risk detection accuracy of 75%. The system demonstrates strong alignment with human perception, particularly in scenes involving sharp or unstable objects. These results underline the potential of context-aware risk reasoning to enhance robotic scene understanding and proactive safety behaviors in shared human-robot spaces. This framework could serve as a foundation for future systems that make context-driven safety decisions, provide real-time alerts, or autonomously assist users in avoiding or mitigating hazards within home environments.
Enhancing Object Search in Indoor Spaces via Personalized Object-factored Ontologies
Jun 17, 2025Personalization is critical for the advancement of service robots. Robots need to develop tailored understandings of the environments they are put in. Moreover, they need to be aware of changes in the environment to facilitate long-term deployment. Long-term understanding as well as personalization is necessary to execute complex tasks like prepare dinner table or tidy my room. A precursor to such tasks is that of Object Search. Consequently, this paper focuses on locating and searching multiple objects in indoor environments. In this paper, we propose two crucial novelties. Firstly, we propose a novel framework that can enable robots to deduce Personalized Ontologies of indoor environments. Our framework consists of a personalization schema that enables the robot to tune its understanding of ontologies. Secondly, we propose an Adaptive Inferencing strategy. We integrate Dynamic Belief Updates into our approach which improves performance in multi-object search tasks. The cumulative effect of personalization and adaptive inferencing is an improved capability in long-term object search. This framework is implemented on top of a multi-layered semantic map. We conduct experiments in real environments and compare our results against various state-of-the-art (SOTA) methods to demonstrate the effectiveness of our approach. Additionally, we show that personalization can act as a catalyst to enhance the performance of SOTAs. Video Link: https://bit.ly/3WHk9i9
SIS: Seam-Informed Strategy for T-shirt Unfolding
Sep 12, 2024Seams are information-rich components of garments. The presence of different types of seams and their combinations helps to select grasping points for garment handling. In this paper, we propose a new Seam-Informed Strategy (SIS) for finding actions for handling a garment, such as grasping and unfolding a T-shirt. Candidates for a pair of grasping points for a dual-arm manipulator system are extracted using the proposed Seam Feature Extraction Method (SFEM). A pair of grasping points for the robot system is selected by the proposed Decision Matrix Iteration Method (DMIM). The decision matrix is first computed by multiple human demonstrations and updated by the robot execution results to improve the grasping and unfolding performance of the robot. Note that the proposed scheme is trained on real data without relying on simulation. Experimental results demonstrate the effectiveness of the proposed strategy. The project video is available at https://github.com/lancexz/sis.
Preferential Multi-Target Search in Indoor Environments using Semantic SLAM
Sep 26, 2023



In recent years, the demand for service robots capable of executing tasks beyond autonomous navigation has grown. In the future, service robots will be expected to perform complex tasks like 'Set table for dinner'. High-level tasks like these, require, among other capabilities, the ability to retrieve multiple targets. This paper delves into the challenge of locating multiple targets in an environment, termed 'Find my Objects.' We present a novel heuristic designed to facilitate robots in conducting a preferential search for multiple targets in indoor spaces. Our approach involves a Semantic SLAM framework that combines semantic object recognition with geometric data to generate a multi-layered map. We fuse the semantic maps with probabilistic priors for efficient inferencing. Recognizing the challenges introduced by obstacles that might obscure a navigation goal and render standard point-to-point navigation strategies less viable, our methodology offers resilience to such factors. Importantly, our method is adaptable to various object detectors, RGB-D SLAM techniques, and local navigation planners. We demonstrate the 'Find my Objects' task in real-world indoor environments, yielding quantitative results that attest to the effectiveness of our methodology. This strategy can be applied in scenarios where service robots need to locate, grasp, and transport objects, taking into account user preferences. For a brief summary, please refer to our video: https://tinyurl.com/PrefTargetSearch
PSM: A Predictive Safety Model for Body Motion Based On the Spring-Damper Pendulum
Jul 29, 2022
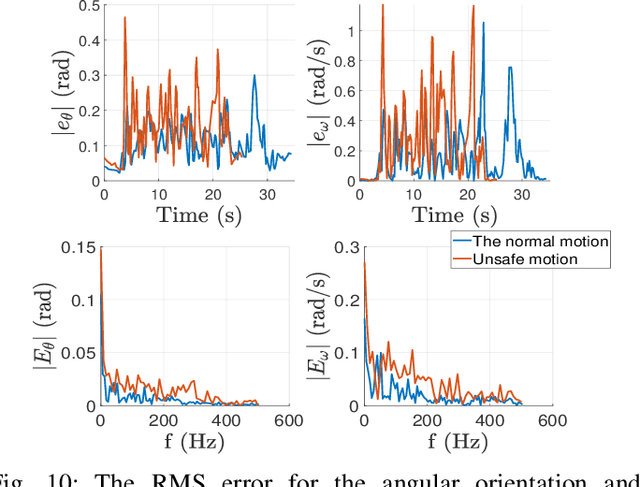
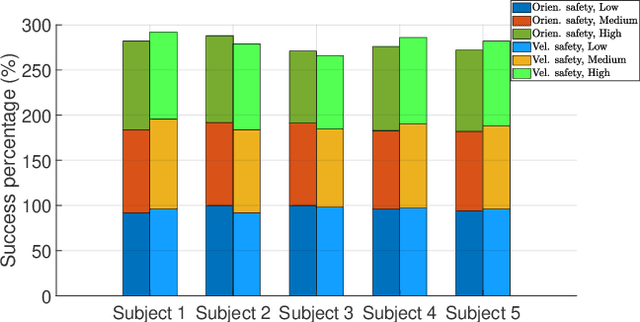
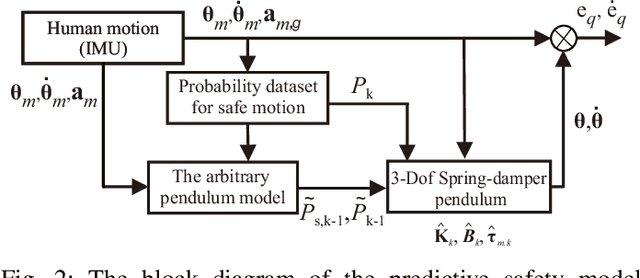
Quantifying the safety of the human body orientation is an important issue in human-robot interaction. Knowing the changing physical constraints on human motion can improve inspection of safe human motions and bring essential information about stability and normality of human body orientations with real-time risk assessment. Also, this information can be used in cooperative robots and monitoring systems to evaluate and interact in the environment more freely. Furthermore, the workspace area can be more deterministic with the known physical characteristics of safety. Based on this motivation, we propose a novel predictive safety model (PSM) that relies on the information of an inertial measurement unit on the human chest. The PSM encompasses a 3-Dofs spring-damper pendulum model that predicts human motion based on a safe motion dataset. The estimated safe orientation of humans is obtained by integrating a safety dataset and an elastic spring-damper model in a way that the proposed approach can realize complex motions at different safety levels. We did experiments in a real-world scenario to verify our novel proposed model. This novel approach can be used in different guidance/assistive robots and health monitoring systems to support and evaluate the human condition, particularly elders.
Discretization and Stabilization of Energy-Based Controller for Period Switching Control and Flexible Scheduling
Jun 13, 2022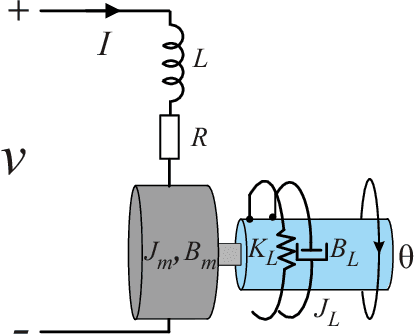
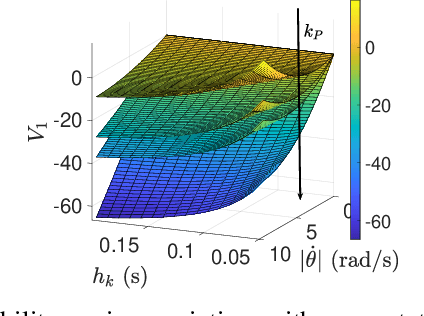
Emerging advanced control applications, with increased complexity in software but limited computing resources, suggest that real-time controllers should have adaptable designs. These control strategies also should be designed with consideration of the run-time behavior of the system. One of such research attempts is to design the controller along with the task scheduler, known as control-scheduling co-design, for more predictable timing behavior as well as surviving system overloads. Unlike traditional controller designs, which have equal-distance sampling periods, the co-design approach increases the system flexibility and resilience by explicitly considering timing properties, for example using an event-based controller or with multiple sampling times (non-uniform sampling and control). Within this context, we introduce the first work on the discretization of an energy-based controller that can switch arbitrarily between multiple periods and adjust the control parameters accordingly without destabilizing the system. A digital controller design based on this paradigm for a DC motor with an elastic load as an example is introduced and the stability condition is given based on the proposed Lyapunov function. The method is evaluated with various computer-based simulations which demonstrate its effectiveness.
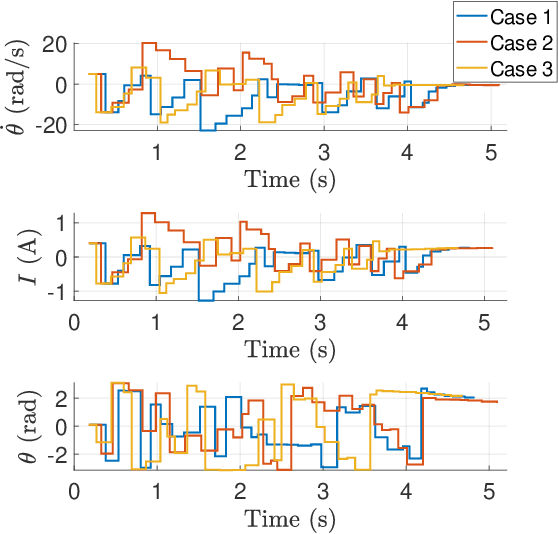
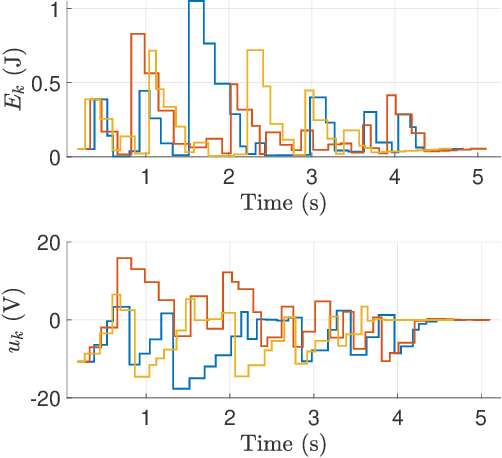
A Novel Assistive Controller Based on Differential Geometry for Users of the Differential-Drive Wheeled Mobile Robots
Feb 04, 2022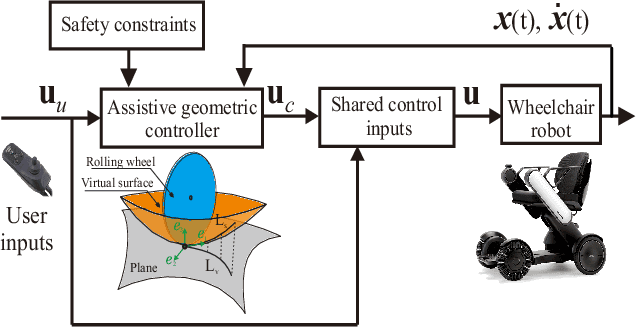
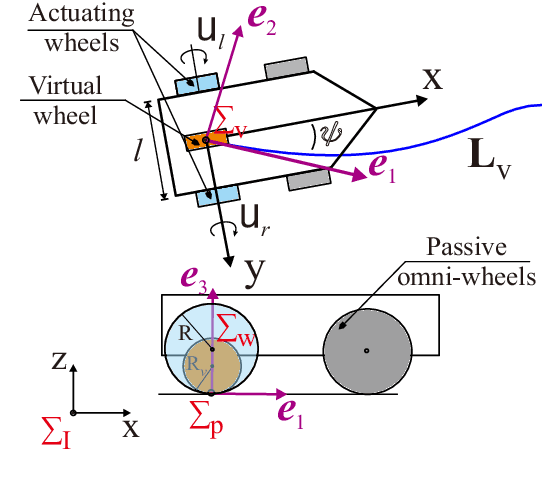
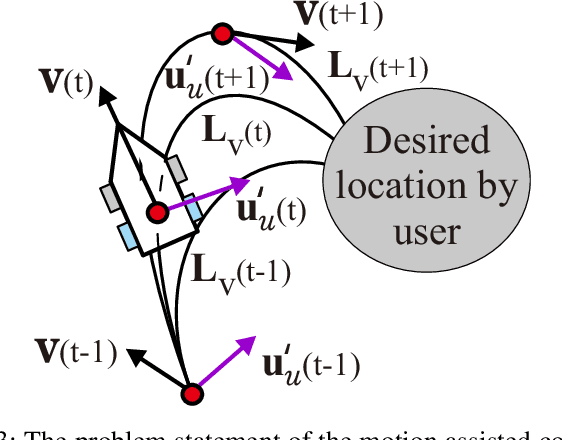
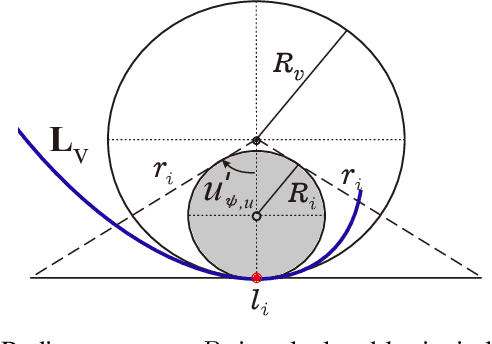
Certain wheeled mobile robots e.g., electric wheelchairs, can operate through indirect joystick controls from users. Correct steering angle becomes essential when the user should determine the vehicle direction and velocity, in particular for differential wheeled vehicles since the vehicle velocity and direction are controlled with only two actuating wheels. This problem gets more challenging when complex curves should be realized by the user. A novel assistive controller with safety constraints is needed to address these problems. Also, the classic control methods mostly require the desired states beforehand which completely contradicts human's spontaneous decisions on the desired location to go. In this work, we develop a novel assistive control strategy based on differential geometry relying on only joystick inputs and vehicle states where the controller does not require any desired states. We begin with explaining the vehicle kinematics and our designed Darboux frame kinematics on a contact point of a virtual wheel and plane. Next, the geometric controller using the Darboux frame kinematics is designed for having smooth trajectories under certain safety constraints. We experiment our approach with different participants and evaluate its performance in various routes.