 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Object Learning and Dual-arm Coordination for Cluttered Stowing, Picking, and Packing
Oct 06, 2018
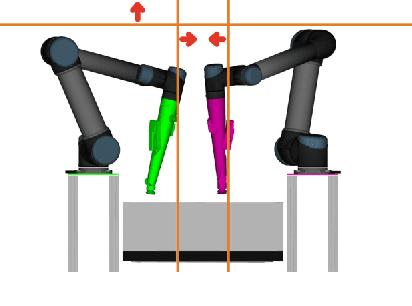
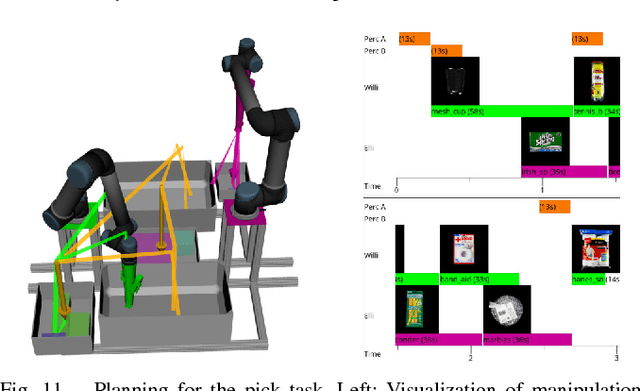
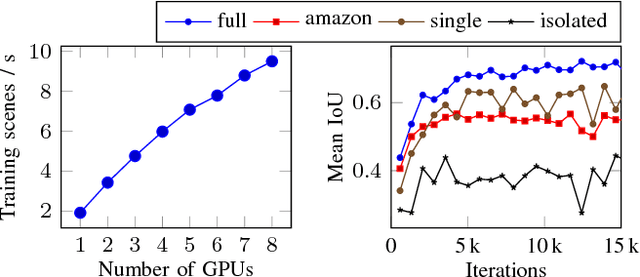
Robotic picking from cluttered bins is a demanding task, for which Amazon Robotics holds challenges. The 2017 Amazon Robotics Challenge (ARC) required stowing items into a storage system, picking specific items, and packing them into boxes. In this paper, we describe the entry of team NimbRo Picking. Our deep object perception pipeline can be quickly and efficiently adapted to new items using a custom turntable capture system and transfer learning. It produces high-quality item segments, on which grasp poses are found. A planning component coordinates manipulation actions between two robot arms, minimizing execution time. The system has been demonstrated successfully at ARC, where our team reached second places in both the picking task and the final stow-and-pick task. We also evaluate individual components.
KittingBot: A Mobile Manipulation Robot for Collaborative Kitting in Automotive Logistics
Sep 14, 2018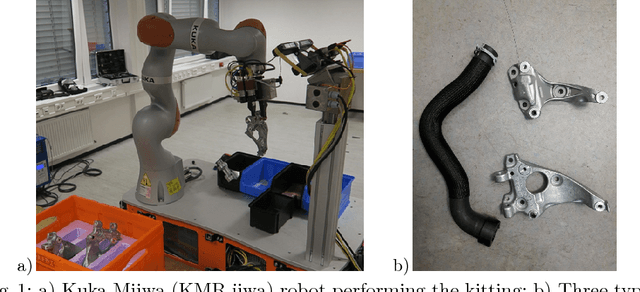
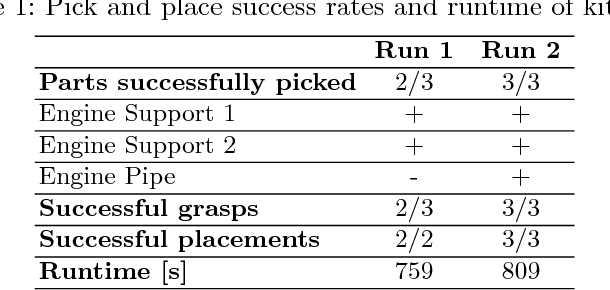
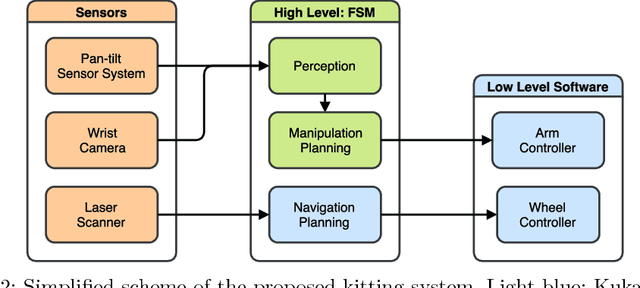
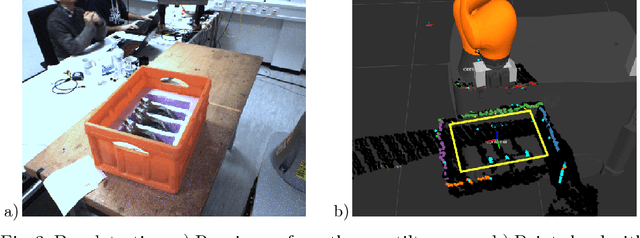
Individualized manufacturing of cars requires kitting: the collection of individual sets of part variants for each car. This challenging logistic task is frequently performed manually by warehouseman. We propose a mobile manipulation robotic system for autonomous kitting, building on the Kuka Miiwa platform which consists of an omnidirectional base, a 7 DoF collaborative iiwa manipulator, cameras, and distance sensors. Software modules for detection and pose estimation of transport boxes, part segmentation in these containers, recognition of part variants, grasp generation, and arm trajectory optimization have been developed and integrated. Our system is designed for collaborative kitting, i.e. some parts are collected by warehouseman while other parts are picked by the robot. To address safe human-robot collaboration, fast arm trajectory replanning considering previously unforeseen obstacles is realized. The developed system was evaluated in the European Robotics Challenge 2, where the Miiwa robot demonstrated autonomous kitting, part variant recognition, and avoidance of unforeseen obstacles.
Transferring Grasping Skills to Novel Instances by Latent Space Non-Rigid Registration
Sep 14, 2018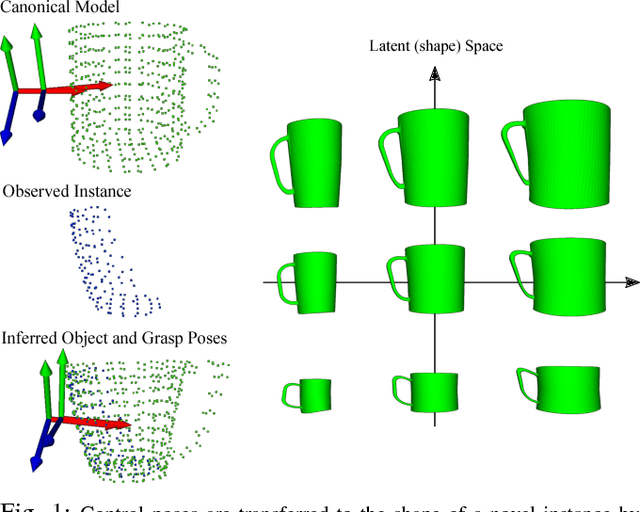
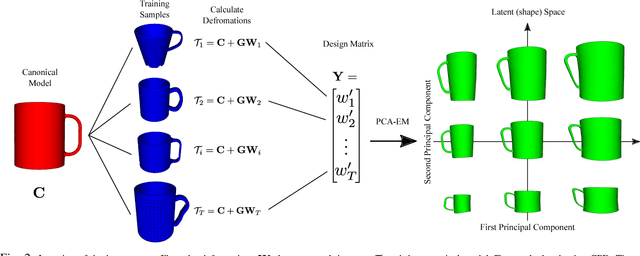
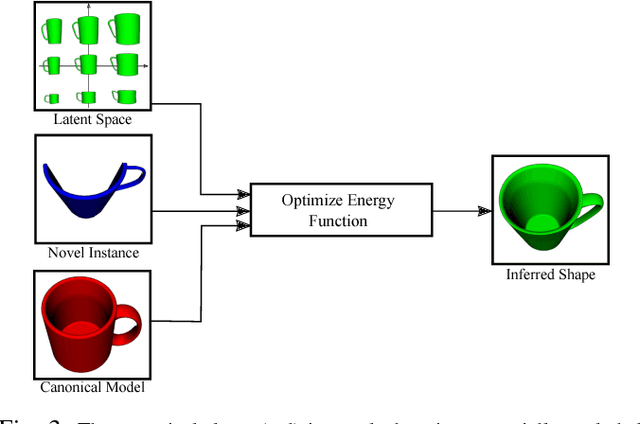
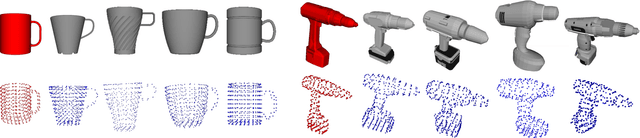
Robots acting in open environments need to be able to handle novel objects. Based on the observation that objects within a category are often similar in their shapes and usage, we propose an approach for transferring grasping skills from known instances to novel instances of an object category. Correspondences between the instances are established by means of a non-rigid registration method that combines the Coherent Point Drift approach with subspace methods. The known object instances are modeled using a canonical shape and a transformation which deforms it to match the instance shape. The principle axes of variation of these deformations define a low-dimensional latent space. New instances can be generated through interpolation and extrapolation in this shape space. For inferring the shape parameters of an unknown instance, an energy function expressed in terms of the latent variables is minimized. Due to the class-level knowledge of the object, our method is able to complete novel shapes from partial views. Control poses for generating grasping motions are transferred efficiently to novel instances by the estimated non-rigid transformation.