 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Reinforcement Learning for Collective Navigation of Robotic Swarms
Feb 02, 2022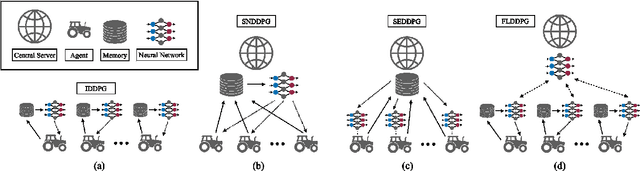
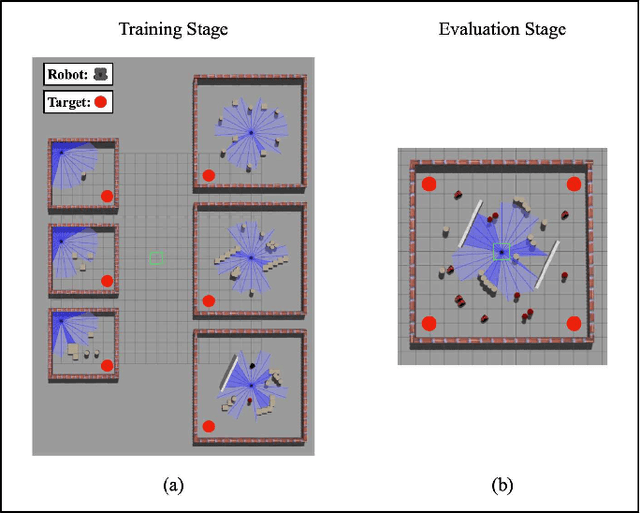
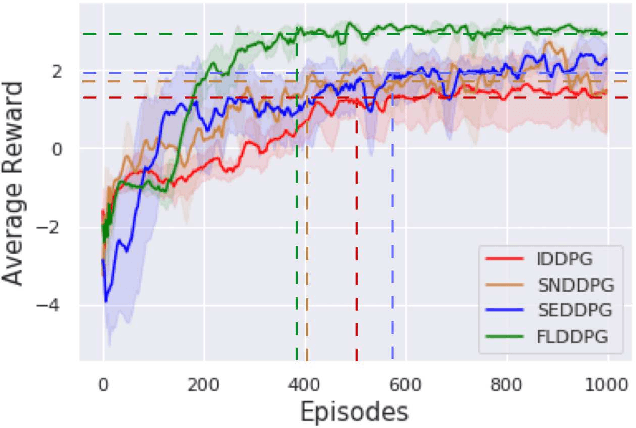
The recent advancement of Deep Reinforcement Learning (DRL) contributed to robotics by allowing automatic controller design. Automatic controller design is a crucial approach for designing swarm robotic systems, which require more complex controller than a single robot system to lead a desired collective behaviour. Although DRL-based controller design method showed its effectiveness, the reliance on the central training server is a critical problem in the real-world environments where the robot-server communication is unstable or limited. We propose a novel Federated Learning (FL) based DRL training strategy for use in swarm robotic applications. As FL reduces the number of robot-server communication by only sharing neural network model weights, not local data samples, the proposed strategy reduces the reliance on the central server during controller training with DRL. The experimental results from the collective learning scenario showed that the proposed FL-based strategy dramatically reduced the number of communication by minimum 1600 times and even increased the success rate of navigation with the trained controller by 2.8 times compared to the baseline strategies that share a central server. The results suggest that our proposed strategy can efficiently train swarm robotic systems in the real-world environments with the limited robot-server communication, e.g. agri-robotics, underwater and damaged nuclear facilities.