 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualTrack: Sensorless 3D Ultrasound needs Local and Global Context
Sep 11, 2025Three-dimensional ultrasound (US) offers many clinical advantages over conventional 2D imaging, yet its widespread adoption is limited by the cost and complexity of traditional 3D systems. Sensorless 3D US, which uses deep learning to estimate a 3D probe trajectory from a sequence of 2D US images, is a promising alternative. Local features, such as speckle patterns, can help predict frame-to-frame motion, while global features, such as coarse shapes and anatomical structures, can situate the scan relative to anatomy and help predict its general shape. In prior approaches, global features are either ignored or tightly coupled with local feature extraction, restricting the ability to robustly model these two complementary aspects. We propose DualTrack, a novel dual-encoder architecture that leverages decoupled local and global encoders specialized for their respective scales of feature extraction. The local encoder uses dense spatiotemporal convolutions to capture fine-grained features, while the global encoder utilizes an image backbone (e.g., a 2D CNN or foundation model) and temporal attention layers to embed high-level anatomical features and long-range dependencies. A lightweight fusion module then combines these features to estimate the trajectory. Experimental results on a large public benchmark show that DualTrack achieves state-of-the-art accuracy and globally consistent 3D reconstructions, outperforming previous methods and yielding an average reconstruction error below 5 mm.
Free-Breathing Water, Fat, $R_2^{\star}$ and $B_0$ Field Mapping of the Liver Using Multi-Echo Radial FLASH and Regularized Model-based Reconstruction
Jan 07, 2021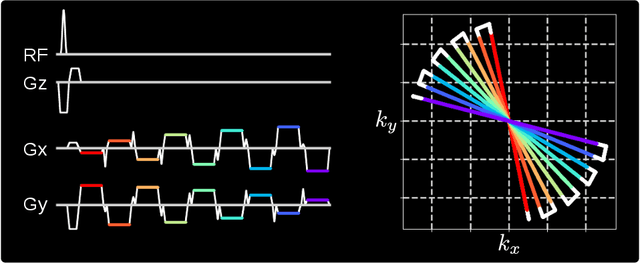
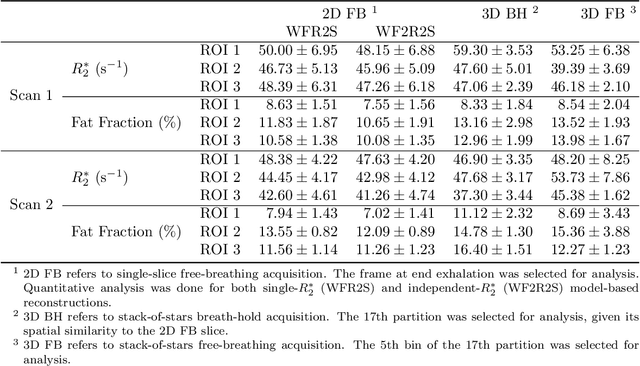
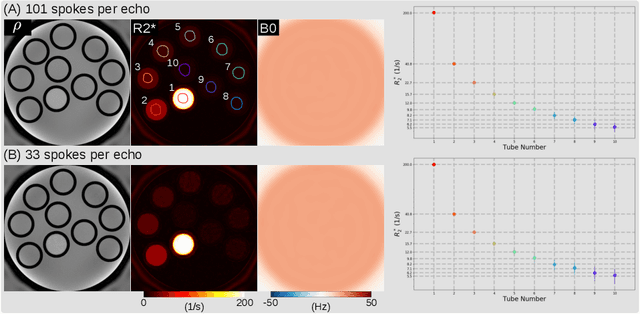
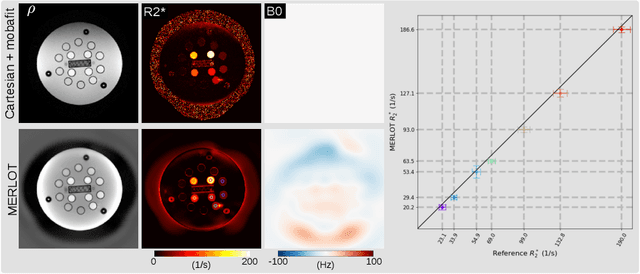
Purpose: To achieve free-breathing quantitative fat and $R_2^{\star}$ mapping of the liver using a generalized model-based iterative reconstruction, dubbed as MERLOT. Methods: For acquisition, we use a multi-echo radial FLASH sequence that acquires multiple echoes with different complementary radial spoke encodings. We investigate real-time single-slice and volumetric multi-echo radial FLASH acquisition. For the latter, the sampling scheme is extended to a volumetric stack-of-stars acquisition. Model-based reconstruction based on generalized nonlinear inversion is used to jointly estimate water, fat, $R_2^{\star}$, $B_0$ field inhomogeneity, and coil sensitivity maps from the multi-coil multi-echo radial spokes. Spatial smoothness regularization is applied onto the B 0 field and coil sensitivity maps, whereas joint sparsity regularization is employed for the other parameter maps. The method integrates calibration-less parallel imaging and compressed sensing and was implemented in BART. For the volumetric acquisition, the respiratory motion is resolved with self-gating using SSA-FARY. The quantitative accuracy of the proposed method was validated via numerical simulation, the NIST phantom, a water/fat phantom, and in in-vivo liver studies. Results: For real-time acquisition, the proposed model-based reconstruction allowed acquisition of dynamic liver fat fraction and $R_2^{\star}$ maps at a temporal resolution of 0.3 s per frame. For the volumetric acquisition, whole liver coverage could be achieved in under 2 minutes using the self-gated motion-resolved reconstruction. Conclusion: The proposed multi-echo radial sampling sequence achieves fast k -space coverage and is robust to motion. The proposed model-based reconstruction yields spatially and temporally resolved liver fat fraction, $R_2^{\star}$ and $B_0$ field maps at high undersampling factor and with volume coverage.