 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Critical Whole-Body Control for Humanoid Robots via Input-to-State Safe Control Barrier Functions
May 25, 2026Safety-critical control is essential for humanoid robots operating in complex human-centered environments, where physical safety constraints such as joint limits, self-collision avoidance, obstacle avoidance, and workspace boundaries must be satisfied during real-robot operation. However, existing approaches remain limited because kinematic safety guarantees can be degraded in the presence of unknown disturbances, such as model uncertainties, trajectory-tracking errors, and external perturbations. This paper presents a hierarchical safety-critical whole-body control framework for humanoid robots based on input-to-state safe control barrier functions (ISSf-CBFs). The proposed architecture integrates a kinematic-level whole-body controller (KinWBC), an ISSf-CBF safety filter, and a dynamic-level whole-body controller (DynWBC). KinWBC generates nominal joint-motion references from prioritized tasks; the ISSf-CBF filter minimally modifies these references to satisfy kinematic safety constraints under bounded disturbances; and DynWBC tracks the filtered references while enforcing full-body dynamic feasibility and contact stability. Safety constraints are imposed on a whole-body kinematic model, and the ISSf-CBF parameters are conservatively tuned so that the resulting kinematic safety guarantees can be transferred to full-order humanoid dynamics under unknown disturbances. Simulation and real-robot experiments demonstrate that the proposed framework improves safety margins under model mismatch and reliably enforces multiple safety constraints in real time during locomotion, teleoperation, and single-leg balancing with hand control. Project website: https://kwlee365.github.io/SafeWBC-Website/
An Effective Pipeline for a Real-world Clothes Retrieval System
May 26, 2020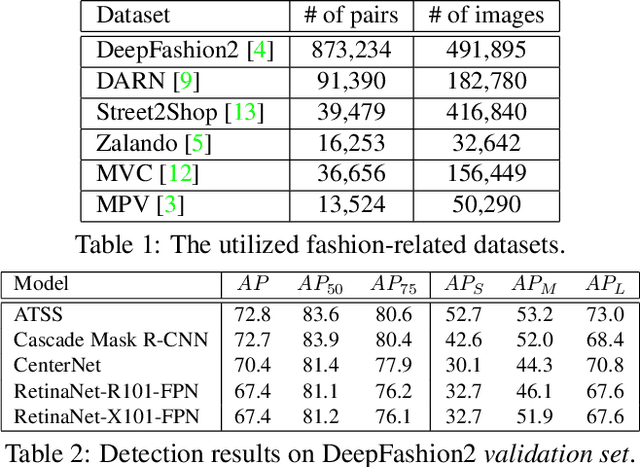
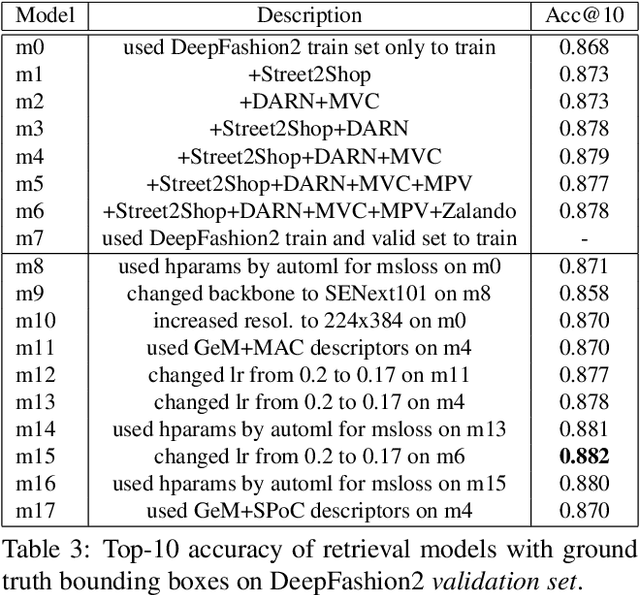
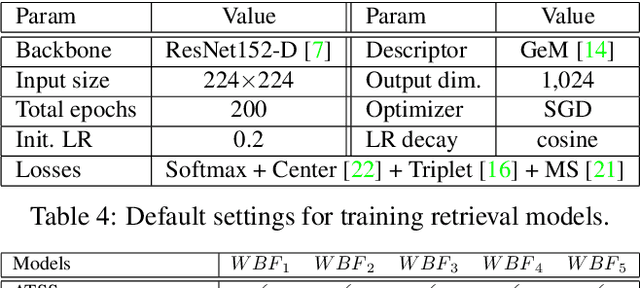
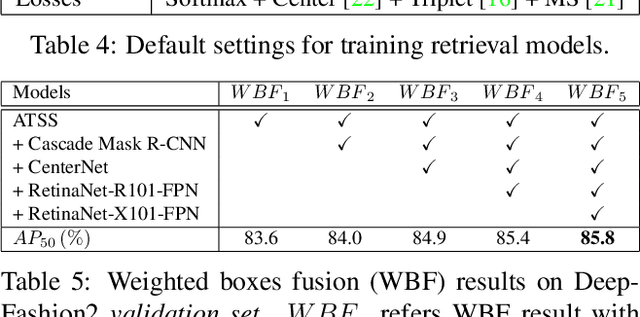
In this paper, we propose an effective pipeline for clothes retrieval system which has sturdiness on large-scale real-world fashion data. Our proposed method consists of three components: detection, retrieval, and post-processing. We firstly conduct a detection task for precise retrieval on target clothes, then retrieve the corresponding items with the metric learning-based model. To improve the retrieval robustness against noise and misleading bounding boxes, we apply post-processing methods such as weighted boxes fusion and feature concatenation. With the proposed methodology, we achieved 2nd place in the DeepFashion2 Clothes Retrieval 2020 challenge.
Semi-supervised Feature-Level Attribute Manipulation for Fashion Image Retrieval
Jul 11, 2019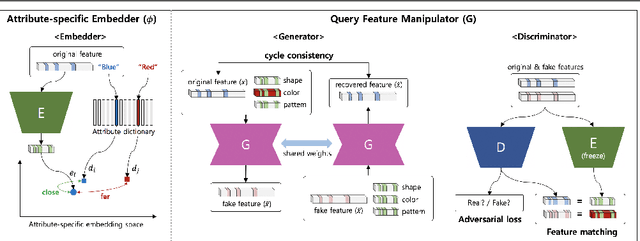
With a growing demand for the search by image, many works have studied the task of fashion instance-level image retrieval (FIR). Furthermore, the recent works introduce a concept of fashion attribute manipulation (FAM) which manipulates a specific attribute (e.g color) of a fashion item while maintaining the rest of the attributes (e.g shape, and pattern). In this way, users can search not only "the same" items but also "similar" items with the desired attributes. FAM is a challenging task in that the attributes are hard to define, and the unique characteristics of a query are hard to be preserved. Although both FIR and FAM are important in real-life applications, most of the previous studies have focused on only one of these problem. In this study, we aim to achieve competitive performance on both FIR and FAM. To do so, we propose a novel method that converts a query into a representation with the desired attributes. We introduce a new idea of attribute manipulation at the feature level, by matching the distribution of manipulated features with real features. In this fashion, the attribute manipulation can be done independently from learning a representation from the image. By introducing the feature-level attribute manipulation, the previous methods for FIR can perform attribute manipulation without sacrificing their retrieval performance.