 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the continuum limit of t-SNE for data visualization
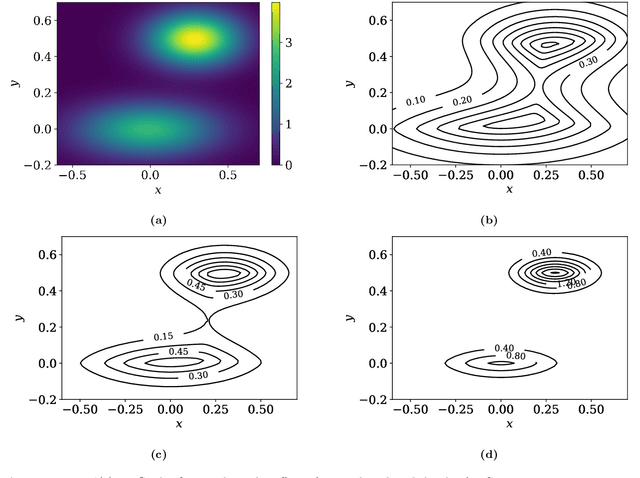
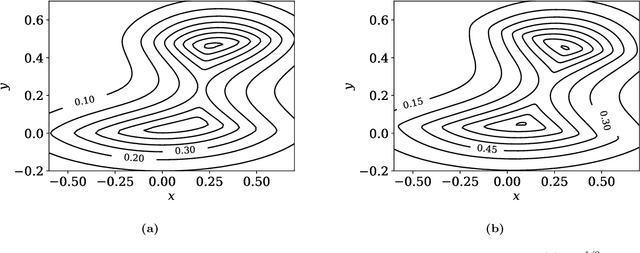
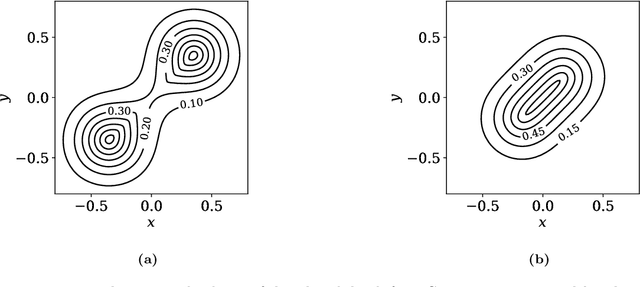
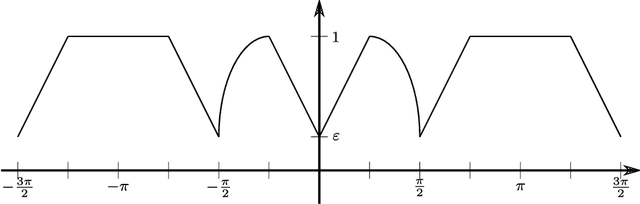
Apr 13, 2026This work is concerned with the continuum limit of a graph-based data visualization technique called the t-Distributed Stochastic Neighbor Embedding (t-SNE), which is widely used for visualizing data in a variety of applications, but is still poorly understood from a theoretical standpoint. The t-SNE algorithm produces visualizations by minimizing the Kullback-Leibler divergence between similarity matrices representing the high dimensional data and its low dimensional representation. We prove that as the number of data points $n \to \infty$, after a natural rescaling and in applicable parameter regimes, the Kullback-Leibler divergence is consistent as the number of data points $n \to \infty$ and the similarity graph remains sparse with a continuum variational problem that involves a non-convex gradient regularization term and a penalty on the magnitude of the probability density function in the visualization space. These two terms represent the continuum limits of the attraction and repulsion forces in the t-SNE algorithm. Due to the lack of convexity in the continuum variational problem, the question of well-posedeness is only partially resolved. We show that when both dimensions are $1$, the problem admits a unique smooth minimizer, along with an infinite number of discontinuous minimizers (interpreted in a relaxed sense). This aligns well with the empirically observed ability of t-SNE to separate data in seemingly arbitrary ways in the visualization. The energy is also very closely related to the famously ill-posed Perona-Malik equation, which is used for denoising and simplifying images. We present numerical results validating the continuum limit, provide some preliminary results about the delicate nature of the limiting energetic problem in higher dimensions, and highlight several problems for future work.
Large data limits and scaling laws for tSNE
Oct 16, 2024This work considers large-data asymptotics for t-distributed stochastic neighbor embedding (tSNE), a widely-used non-linear dimension reduction algorithm. We identify an appropriate continuum limit of the tSNE objective function, which can be viewed as a combination of a kernel-based repulsion and an asymptotically-vanishing Laplacian-type regularizer. As a consequence, we show that embeddings of the original tSNE algorithm cannot have any consistent limit as $n \to \infty$. We propose a rescaled model which mitigates the asymptotic decay of the attractive energy, and which does have a consistent limit.
On Probabilistic Embeddings in Optimal Dimension Reduction
Aug 05, 2024


Dimension reduction algorithms are a crucial part of many data science pipelines, including data exploration, feature creation and selection, and denoising. Despite their wide utilization, many non-linear dimension reduction algorithms are poorly understood from a theoretical perspective. In this work we consider a generalized version of multidimensional scaling, which is posed as an optimization problem in which a mapping from a high-dimensional feature space to a lower-dimensional embedding space seeks to preserve either inner products or norms of the distribution in feature space, and which encompasses many commonly used dimension reduction algorithms. We analytically investigate the variational properties of this problem, leading to the following insights: 1) Solutions found using standard particle descent methods may lead to non-deterministic embeddings, 2) A relaxed or probabilistic formulation of the problem admits solutions with easily interpretable necessary conditions, 3) The globally optimal solutions to the relaxed problem actually must give a deterministic embedding. This progression of results mirrors the classical development of optimal transportation, and in a case relating to the Gromov-Wasserstein distance actually gives explicit insight into the structure of the optimal embeddings, which are parametrically determined and discontinuous. Finally, we illustrate that a standard computational implementation of this task does not learn deterministic embeddings, which means that it learns sub-optimal mappings, and that the embeddings learned in that context have highly misleading clustering structure, underscoring the delicate nature of solving this problem computationally.
Uniform Convergence of Adversarially Robust Classifiers
Jun 20, 2024


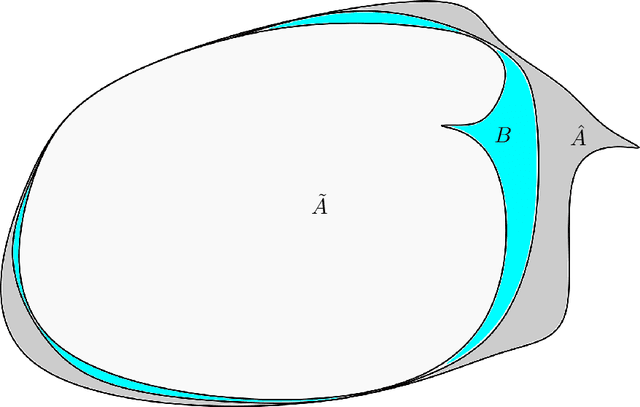
In recent years there has been significant interest in the effect of different types of adversarial perturbations in data classification problems. Many of these models incorporate the adversarial power, which is an important parameter with an associated trade-off between accuracy and robustness. This work considers a general framework for adversarially-perturbed classification problems, in a large data or population-level limit. In such a regime, we demonstrate that as adversarial strength goes to zero that optimal classifiers converge to the Bayes classifier in the Hausdorff distance. This significantly strengthens previous results, which generally focus on $L^1$-type convergence. The main argument relies upon direct geometric comparisons and is inspired by techniques from geometric measure theory.
Dirichlet Active Learning
Nov 09, 2023



This work introduces Dirichlet Active Learning (DiAL), a Bayesian-inspired approach to the design of active learning algorithms. Our framework models feature-conditional class probabilities as a Dirichlet random field and lends observational strength between similar features in order to calibrate the random field. This random field can then be utilized in learning tasks: in particular, we can use current estimates of mean and variance to conduct classification and active learning in the context where labeled data is scarce. We demonstrate the applicability of this model to low-label rate graph learning by constructing ``propagation operators'' based upon the graph Laplacian, and offer computational studies demonstrating the method's competitiveness with the state of the art. Finally, we provide rigorous guarantees regarding the ability of this approach to ensure both exploration and exploitation, expressed respectively in terms of cluster exploration and increased attention to decision boundaries.
Using Higher-Order Moments to Assess the Quality of GAN-generated Image Features
Oct 31, 2023The rapid advancement of Generative Adversarial Networks (GANs) necessitates the need to robustly evaluate these models. Among the established evaluation criteria, the Fr\'{e}chet Inception Distance (FID) has been widely adopted due to its conceptual simplicity, fast computation time, and strong correlation with human perception. However, FID has inherent limitations, mainly stemming from its assumption that feature embeddings follow a Gaussian distribution, and therefore can be defined by their first two moments. As this does not hold in practice, in this paper we explore the importance of third-moments in image feature data and use this information to define a new measure, which we call the Skew Inception Distance (SID). We prove that SID is a pseudometric on probability distributions, show how it extends FID, and present a practical method for its computation. Our numerical experiments support that SID either tracks with FID or, in some cases, aligns more closely with human perception when evaluating image features of ImageNet data.
Rates of Convergence for Regression with the Graph Poly-Laplacian
Sep 06, 2022In the (special) smoothing spline problem one considers a variational problem with a quadratic data fidelity penalty and Laplacian regularisation. Higher order regularity can be obtained via replacing the Laplacian regulariser with a poly-Laplacian regulariser. The methodology is readily adapted to graphs and here we consider graph poly-Laplacian regularisation in a fully supervised, non-parametric, noise corrupted, regression problem. In particular, given a dataset $\{x_i\}_{i=1}^n$ and a set of noisy labels $\{y_i\}_{i=1}^n\subset\mathbb{R}$ we let $u_n:\{x_i\}_{i=1}^n\to\mathbb{R}$ be the minimiser of an energy which consists of a data fidelity term and an appropriately scaled graph poly-Laplacian term. When $y_i = g(x_i)+\xi_i$, for iid noise $\xi_i$, and using the geometric random graph, we identify (with high probability) the rate of convergence of $u_n$ to $g$ in the large data limit $n\to\infty$. Furthermore, our rate, up to logarithms, coincides with the known rate of convergence in the usual smoothing spline model.
Eikonal depth: an optimal control approach to statistical depths
Jan 14, 2022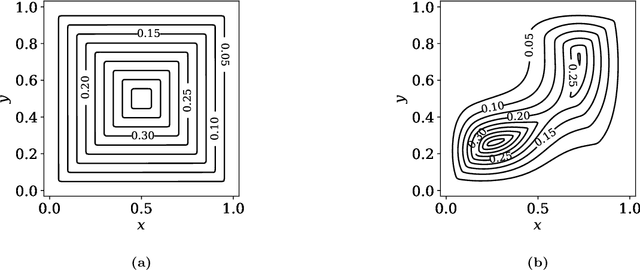
Statistical depths provide a fundamental generalization of quantiles and medians to data in higher dimensions. This paper proposes a new type of globally defined statistical depth, based upon control theory and eikonal equations, which measures the smallest amount of probability density that has to be passed through in a path to points outside the support of the distribution: for example spatial infinity. This depth is easy to interpret and compute, expressively captures multi-modal behavior, and extends naturally to data that is non-Euclidean. We prove various properties of this depth, and provide discussion of computational considerations. In particular, we demonstrate that this notion of depth is robust under an aproximate isometrically constrained adversarial model, a property which is not enjoyed by the Tukey depth. Finally we give some illustrative examples in the context of two-dimensional mixture models and MNIST.
The Geometry of Adversarial Training in Binary Classification
Nov 26, 2021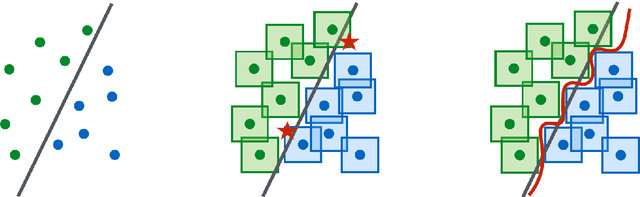
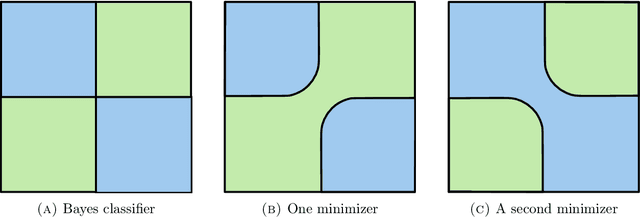
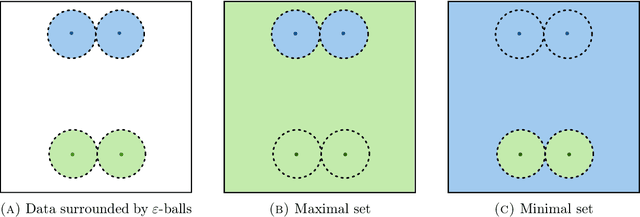
We establish an equivalence between a family of adversarial training problems for non-parametric binary classification and a family of regularized risk minimization problems where the regularizer is a nonlocal perimeter functional. The resulting regularized risk minimization problems admit exact convex relaxations of the type $L^1+$ (nonlocal) $\operatorname{TV}$, a form frequently studied in image analysis and graph-based learning. A rich geometric structure is revealed by this reformulation which in turn allows us to establish a series of properties of optimal solutions of the original problem, including the existence of minimal and maximal solutions (interpreted in a suitable sense), and the existence of regular solutions (also interpreted in a suitable sense). In addition, we highlight how the connection between adversarial training and perimeter minimization problems provides a novel, directly interpretable, statistical motivation for a family of regularized risk minimization problems involving perimeter/total variation. The majority of our theoretical results are independent of the distance used to define adversarial attacks.
Tukey Depths and Hamilton-Jacobi Differential Equations
Apr 04, 2021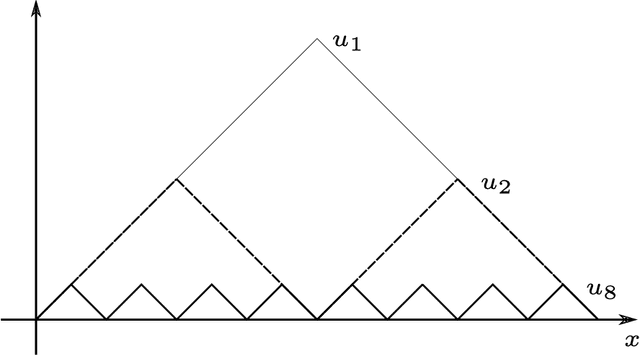
The widespread application of modern machine learning has increased the need for robust statistical algorithms. This work studies one such fundamental statistical measure known as the Tukey depth. We study the problem in the continuum (population) limit. In particular, we derive the associated necessary conditions, which take the form of a first-order partial differential equation. We discuss the classical interpretation of this necessary condition as the viscosity solution of a Hamilton-Jacobi equation, but with a non-classical Hamiltonian with discontinuous dependence on the gradient at zero. We prove that this equation possesses a unique viscosity solution and that this solution always bounds the Tukey depth from below. In certain cases, we prove that the Tukey depth is equal to the viscosity solution, and we give some illustrations of standard numerical methods from the optimal control community which deal directly with the partial differential equation. We conclude by outlining several promising research directions both in terms of new numerical algorithms and theoretical challenges.