 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeing Roads Through Words: A Language-Guided Framework for RGB-T Driving Scene Segmentation
Feb 07, 2026Robust semantic segmentation of road scenes under adverse illumination, lighting, and shadow conditions remain a core challenge for autonomous driving applications. RGB-Thermal fusion is a standard approach, yet existing methods apply static fusion strategies uniformly across all conditions, allowing modality-specific noise to propagate throughout the network. Hence, we propose CLARITY that dynamically adapts its fusion strategy to the detected scene condition. Guided by vision-language model (VLM) priors, the network learns to modulate each modality's contribution based on the illumination state while leveraging object embeddings for segmentation, rather than applying a fixed fusion policy. We further introduce two mechanisms, i.e., one which preserves valid dark-object semantics that prior noise-suppression methods incorrectly discard, and a hierarchical decoder that enforces structural consistency across scales to sharpen boundaries on thin objects. Experiments on the MFNet dataset demonstrate that CLARITY establishes a new state-of-the-art (SOTA), achieving 62.3% mIoU and 77.5% mAcc.
RAPiD: Real-time Deterministic Trajectory Planning via Diffusion Behavior Priors for Safe and Efficient Autonomous Driving
Feb 07, 2026Diffusion-based trajectory planners have demonstrated strong capability for modeling the multimodal nature of human driving behavior, but their reliance on iterative stochastic sampling poses critical challenges for real-time, safety-critical deployment. In this work, we present RAPiD, a deterministic policy extraction framework that distills a pretrained diffusion-based planner into an efficient policy while eliminating diffusion sampling. Using score-regularized policy optimization, we leverage the score function of a pre-trained diffusion planner as a behavior prior to regularize policy learning. To promote safety and passenger comfort, the policy is optimized using a critic trained to imitate a predictive driver controller, providing dense, safety-focused supervision beyond conventional imitation learning. Evaluations demonstrate that RAPiD achieves competitive performance on closed-loop nuPlan scenarios with an 8x speedup over diffusion baselines, while achieving state-of-the-art generalization among learning-based planners on the interPlan benchmark. The official website of this work is: https://github.com/ruturajreddy/RAPiD.
Drive As You Like: Strategy-Level Motion Planning Based on A Multi-Head Diffusion Model
Aug 23, 2025Recent advances in motion planning for autonomous driving have led to models capable of generating high-quality trajectories. However, most existing planners tend to fix their policy after supervised training, leading to consistent but rigid driving behaviors. This limits their ability to reflect human preferences or adapt to dynamic, instruction-driven demands. In this work, we propose a diffusion-based multi-head trajectory planner(M-diffusion planner). During the early training stage, all output heads share weights to learn to generate high-quality trajectories. Leveraging the probabilistic nature of diffusion models, we then apply Group Relative Policy Optimization (GRPO) to fine-tune the pre-trained model for diverse policy-specific behaviors. At inference time, we incorporate a large language model (LLM) to guide strategy selection, enabling dynamic, instruction-aware planning without switching models. Closed-loop simulation demonstrates that our post-trained planner retains strong planning capability while achieving state-of-the-art (SOTA) performance on the nuPlan val14 benchmark. Open-loop results further show that the generated trajectories exhibit clear diversity, effectively satisfying multi-modal driving behavior requirements. The code and related experiments will be released upon acceptance of the paper.
Modified LAB Algorithm with Clustering-based Search Space Reduction Method for solving Engineering Design Problems
Oct 04, 2023



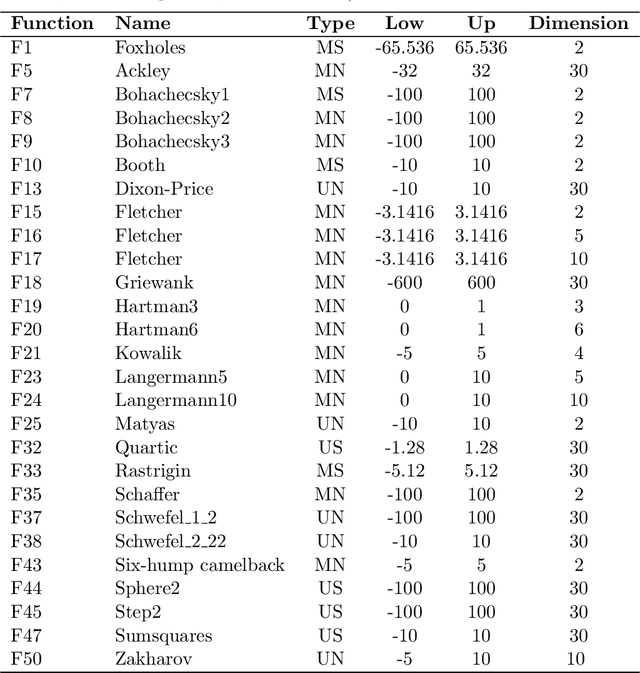
A modified LAB algorithm is introduced in this paper. It builds upon the original LAB algorithm (Reddy et al. 2023), which is a socio-inspired algorithm that models competitive and learning behaviours within a group, establishing hierarchical roles. The proposed algorithm incorporates the roulette wheel approach and a reduction factor introducing inter-group competition and iteratively narrowing down the sample space. The algorithm is validated by solving the benchmark test problems from CEC 2005 and CEC 2017. The solutions are validated using standard statistical tests such as two-sided and pairwise signed rank Wilcoxon test and Friedman rank test. The algorithm exhibited improved and superior robustness as well as search space exploration capabilities. Furthermore, a Clustering-Based Search Space Reduction (C-SSR) method is proposed, making the algorithm capable to solve constrained problems. The C-SSR method enables the algorithm to identify clusters of feasible regions, satisfying the constraints and contributing to achieve the optimal solution. This method demonstrates its effectiveness as a potential alternative to traditional constraint handling techniques. The results obtained using the Modified LAB algorithm are then compared with those achieved by other recent metaheuristic algorithms.
LAB: A Leader-Advocate-Believer Based Optimization Algorithm
Apr 23, 2022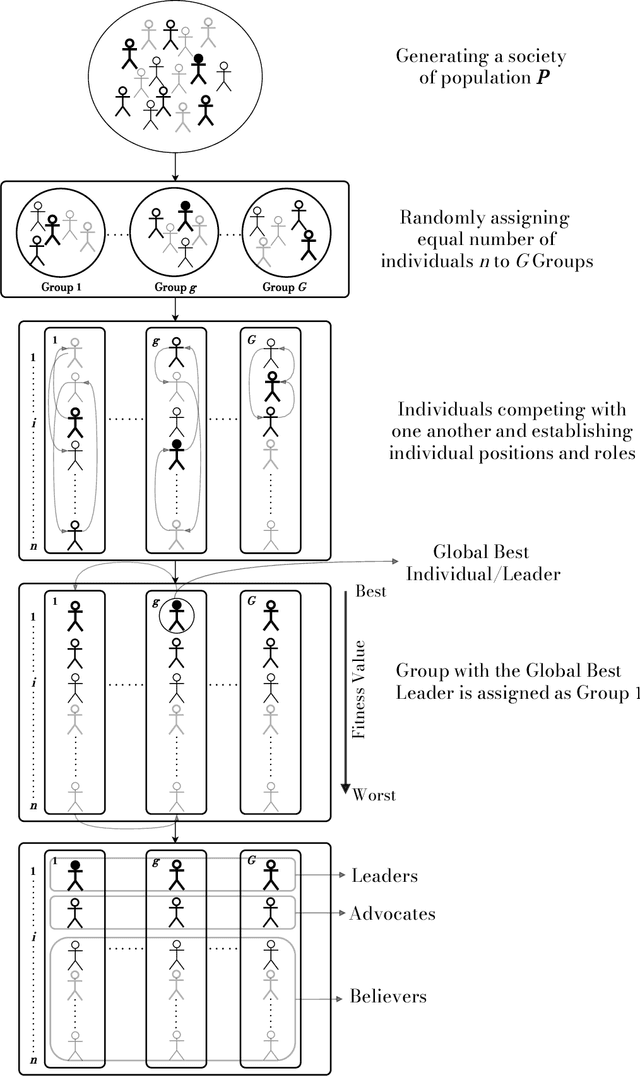
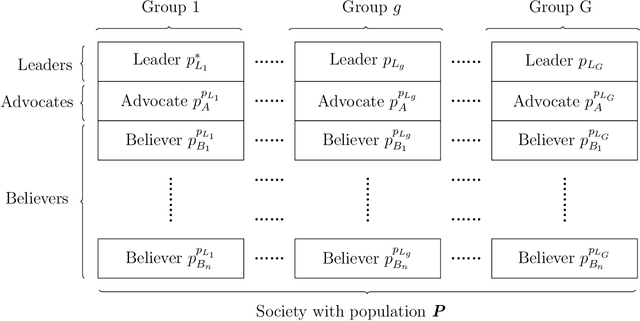
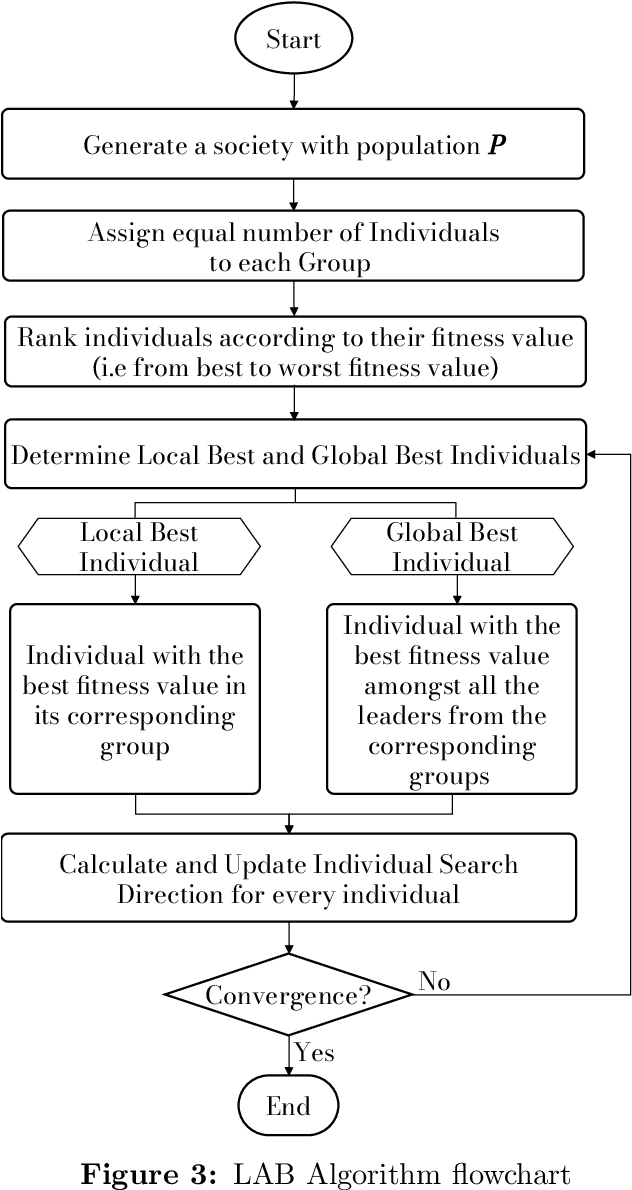
This manuscript introduces a new socio-inspired metaheuristic technique referred to as Leader-Advocate-Believer based optimization algorithm (LAB) for engineering and global optimization problems. The proposed algorithm is inspired by the AI-based competitive behaviour exhibited by the individuals in a group while simultaneously improving themselves and establishing a role (Leader, Advocate, Believer). LAB performance in computational time and function evaluations are benchmarked using other metaheuristic algorithms. Besides benchmark problems, the LAB algorithm was applied for solving challenging engineering problems, including abrasive water jet machining, electric discharge machining, micro-machining processes, and process parameter optimization for turning titanium alloy in a minimum quantity lubrication environment. The results were superior to the other algorithms compared such as Firefly Algorithm, Variations of Co-hort Intelligence, Genetic Algorithm, Simulated Annealing, Particle Swarm Optimisation, and Multi-Cohort Intelligence. The results from this study highlighted that the LAB outperforms the other algorithms in terms of function evaluations and computational time. The prominent features of the LAB algorithm along with its limitations are also discussed.