 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWarmth and Competence in the Swarm: Designing Effective Human-Robot Teams
Apr 21, 2026As groups of robots increasingly collaborate with humans, understanding how humans perceive them is critical for designing effective human-robot teams. While prior research examined how humans interpret and evaluate the abilities and intentions of individual agents, social perception of robot teams remains relatively underexplored. Drawing on the competence-warmth framework, we conducted two studies manipulating swarm behaviors in completing a collective search task and measured the social perception of swarm behaviors when human participants are either observers (Study 1) and operators (Study 2). Across both studies, our results show that variations in swarm behaviors consistently influenced participants' perceptions of warmth and competence. Notably, longer broadcast durations increased perceived warmth; larger separation distances increased perceived competence. Interestingly, individual robot speed had no effect on either of the perceptions. Furthermore, our results show that these social perceptions predicted participants' team preferences more strongly than task performance. Participants preferred robot teams that were both warm and competent, not those that completed tasks most quickly. These findings demonstrate that human-robot interaction dynamically shapes social perception, underscoring the importance of integrating both technical and social considerations when designing robot swarms for effective human-robot collaboration.
GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models
Mar 31, 2025The development of control policies for multi-robot systems traditionally follows a complex and labor-intensive process, often lacking the flexibility to adapt to dynamic tasks. This has motivated research on methods to automatically create control policies. However, these methods require iterative processes of manually crafting and refining objective functions, thereby prolonging the development cycle. This work introduces \textit{GenSwarm}, an end-to-end system that leverages large language models to automatically generate and deploy control policies for multi-robot tasks based on simple user instructions in natural language. As a multi-language-agent system, GenSwarm achieves zero-shot learning, enabling rapid adaptation to altered or unseen tasks. The white-box nature of the code policies ensures strong reproducibility and interpretability. With its scalable software and hardware architectures, GenSwarm supports efficient policy deployment on both simulated and real-world multi-robot systems, realizing an instruction-to-execution end-to-end functionality that could prove valuable for robotics specialists and non-specialists alike.The code of the proposed GenSwarm system is available online: https://github.com/WindyLab/GenSwarm.
Beyond Local Nash Equilibria for Adversarial Networks
Jul 26, 2018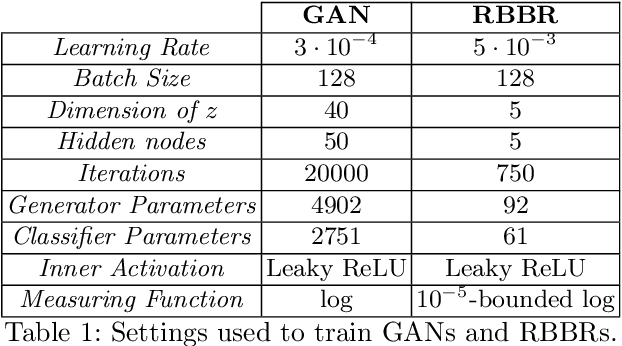
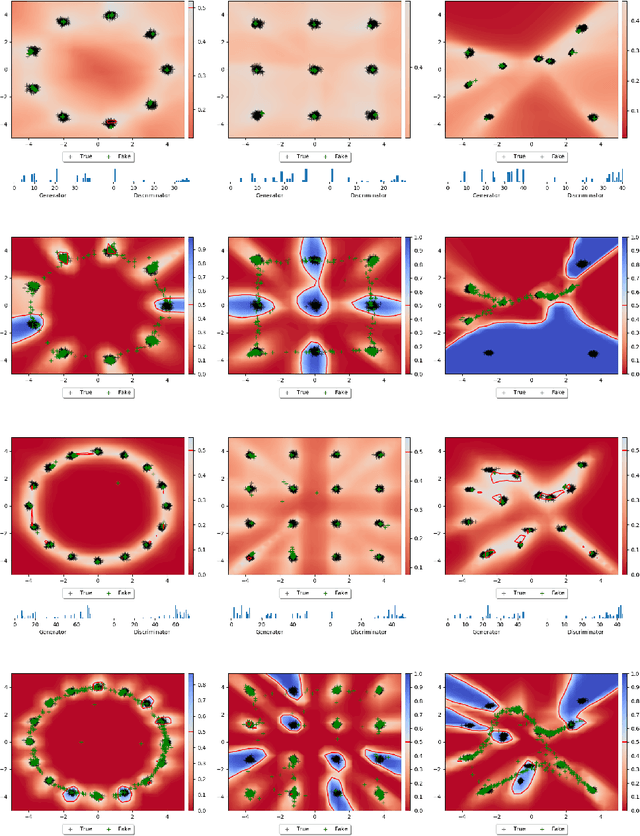
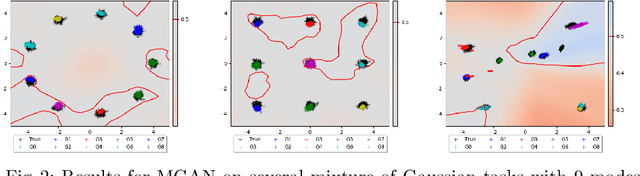
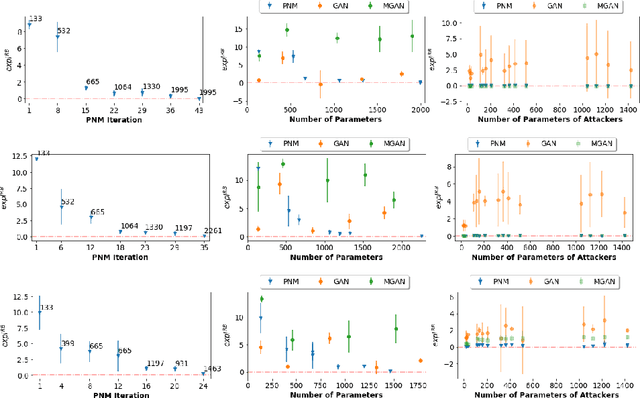
Save for some special cases, current training methods for Generative Adversarial Networks (GANs) are at best guaranteed to converge to a `local Nash equilibrium` (LNE). Such LNEs, however, can be arbitrarily far from an actual Nash equilibrium (NE), which implies that there are no guarantees on the quality of the found generator or classifier. This paper proposes to model GANs explicitly as finite games in mixed strategies, thereby ensuring that every LNE is an NE. With this formulation, we propose a solution method that is proven to monotonically converge to a resource-bounded Nash equilibrium (RB-NE): by increasing computational resources we can find better solutions. We empirically demonstrate that our method is less prone to typical GAN problems such as mode collapse, and produces solutions that are less exploitable than those produced by GANs and MGANs, and closely resemble theoretical predictions about NEs.