 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHA-ViD: A Human Assembly Video Dataset for Comprehensive Assembly Knowledge Understanding
Jul 09, 2023Understanding comprehensive assembly knowledge from videos is critical for futuristic ultra-intelligent industry. To enable technological breakthrough, we present HA-ViD - the first human assembly video dataset that features representative industrial assembly scenarios, natural procedural knowledge acquisition process, and consistent human-robot shared annotations. Specifically, HA-ViD captures diverse collaboration patterns of real-world assembly, natural human behaviors and learning progression during assembly, and granulate action annotations to subject, action verb, manipulated object, target object, and tool. We provide 3222 multi-view, multi-modality videos (each video contains one assembly task), 1.5M frames, 96K temporal labels and 2M spatial labels. We benchmark four foundational video understanding tasks: action recognition, action segmentation, object detection and multi-object tracking. Importantly, we analyze their performance for comprehending knowledge in assembly progress, process efficiency, task collaboration, skill parameters and human intention. Details of HA-ViD is available at: https://iai-hrc.github.io/ha-vid.
Motivations and Preliminary Design for Mid-Air Deployment of a Science Rotorcraft on Mars
Oct 13, 2020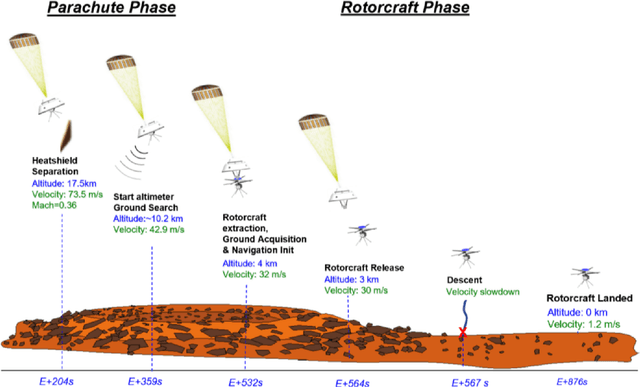
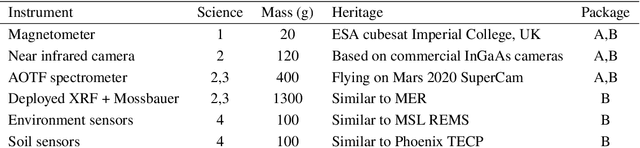
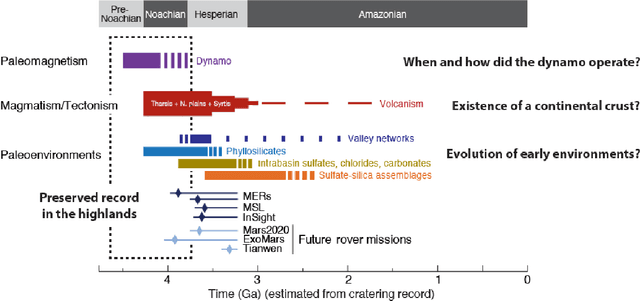
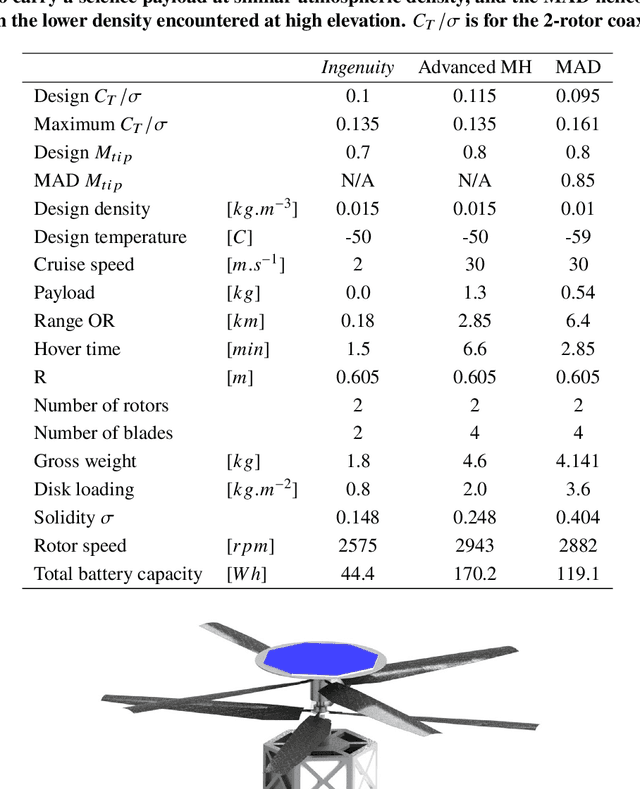
Mid-Air Deployment (MAD) of a rotorcraft during Entry, Descent and Landing (EDL) on Mars eliminates the need to carry a propulsion or airbag landing system. This reduces the total mass inside the aeroshell by more than 100 kg and simplifies the aeroshell architecture. MAD's lighter and simpler design is likely to bring the risk and cost associated with the mission down. Moreover, the lighter entry mass enables landing in the Martian highlands, at elevations inaccessible to current EDL technologies. This paper proposes a novel MAD concept for a Mars helicopter. We suggest a minimum science payload package to perform relevant science in the highlands. A variant of the Ingenuity helicopter is proposed to provide increased deceleration during MAD, and enough lift to fly the science payload in the highlands. We show in simulation that the lighter aeroshell results in a lower terminal velocity (30 m/s) at the end of the parachute phase of the EDL, and at higher altitudes than other approaches. After discussing the aerodynamics, controls, guidance, and mechanical challenges associated with deploying at such speed, we propose a backshell architecture that addresses them to release the helicopter in the safest conditions. Finally, we implemented the helicopter model and aerodynamic descent perturbations in the JPL Dynamics and Real-Time Simulation (DARTS)framework. Preliminary performance evaluation indicates landing and helicopter operation scan be achieved up to 5 km MOLA (Mars Orbiter Laser Altimeter reference).