 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative State Estimation using Event-Based Propeller Sensing
Apr 20, 2026Autonomous swarms of multi-Unmanned Aerial Vehicle (UAV) system requires an accurate and fast relative state estimation. Although monocular frame-based camera methods perform well in ideal conditions, they are slow, suffer scale ambiguity, and often struggle in visually challenging conditions. The advent of event cameras addresses these challenging tasks by providing low latency, high dynamic range, and microsecond-level temporal resolution. This paper proposes a framework for relative state estimation for quadrotors using event-based propeller sensing. The propellers in the event stream are tracked by detection to extract the region-of-interests. The event streams in these regions are processed in temporal chunks to estimate per-propeller frequencies. These frequency measurements drive a kinematic state estimation module as a thrust input, while camera-derived position measurements provide the update step. Additionally, we use geometric primitives derived from event streams to estimate the orientation of the quadrotor by fitting an ellipse over a propeller and backprojecting it to recover body-frame tilt-axis. The existing event-based approaches for quadrotor state estimation use the propeller frequency in simulated flight sequences. Our approach estimates the propeller frequency under 3% error on a test dataset of five real-world outdoor flight sequences, providing a method for decentralized relative localization for multi-robot systems using event camera.
A Conditional Adversarial Network for Scene Flow Estimation
Apr 25, 2019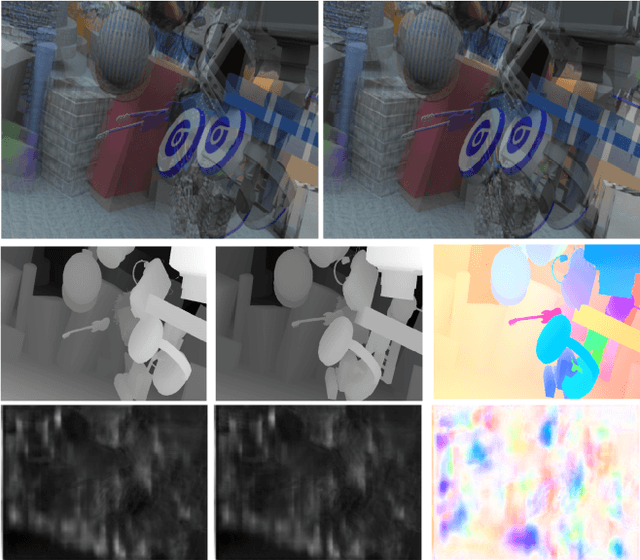
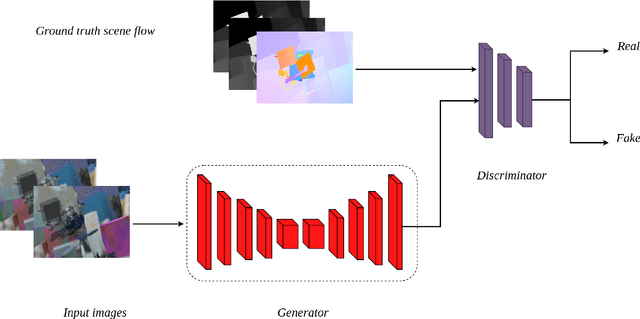
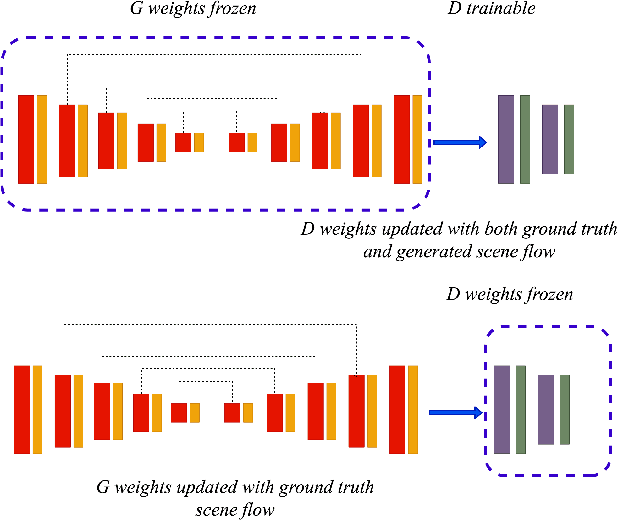
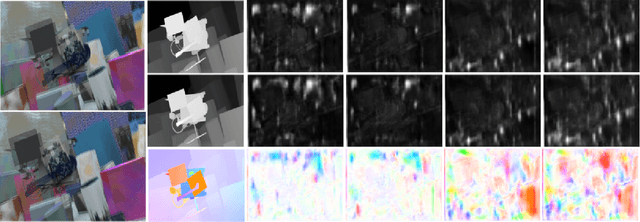
The problem of Scene flow estimation in depth videos has been attracting attention of researchers of robot vision, due to its potential application in various areas of robotics. The conventional scene flow methods are difficult to use in reallife applications due to their long computational overhead. We propose a conditional adversarial network SceneFlowGAN for scene flow estimation. The proposed SceneFlowGAN uses loss function at two ends: both generator and descriptor ends. The proposed network is the first attempt to estimate scene flow using generative adversarial networks, and is able to estimate both the optical flow and disparity from the input stereo images simultaneously. The proposed method is experimented on a large RGB-D benchmark sceneflow dataset.
SceneEDNet: A Deep Learning Approach for Scene Flow Estimation
Jul 10, 2018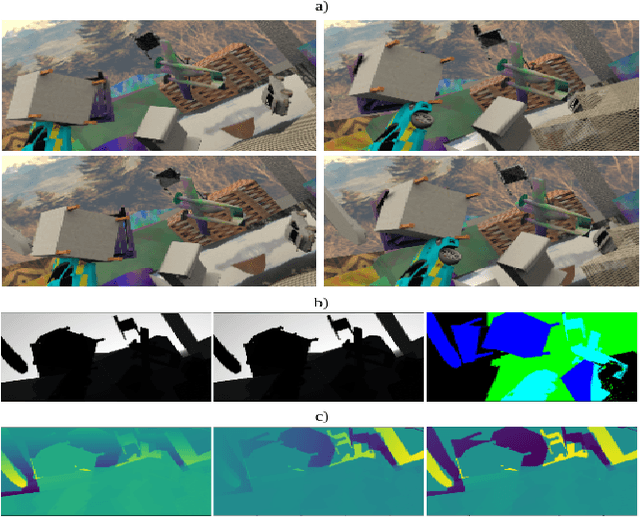
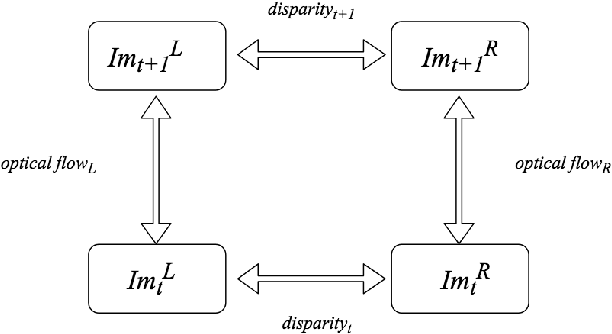
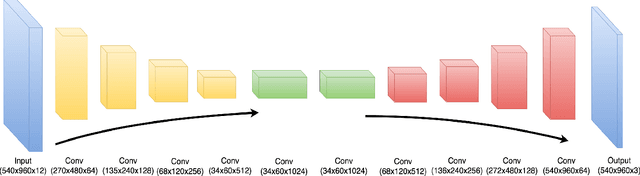
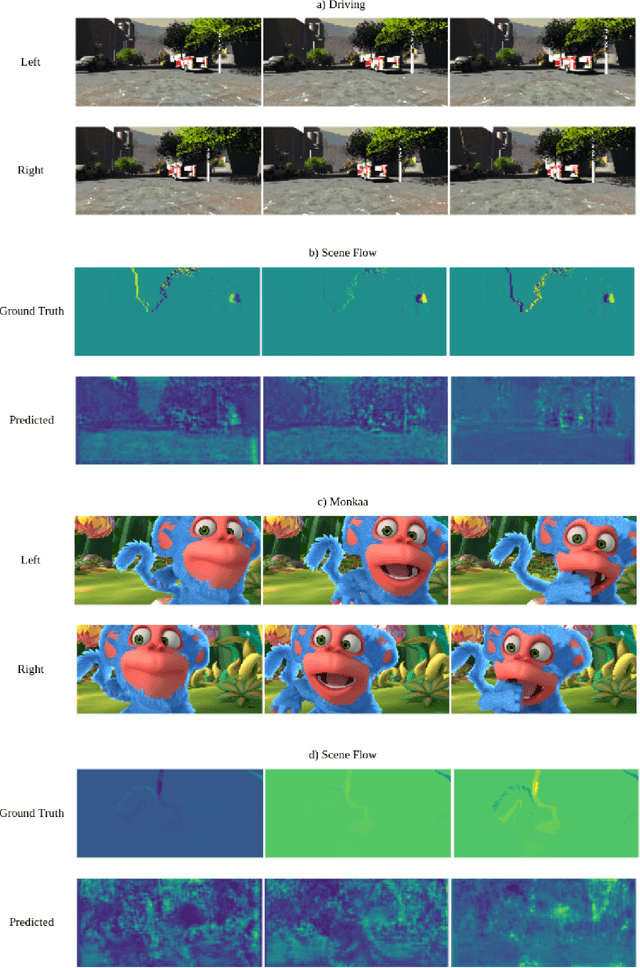
Estimating scene flow in RGB-D videos is attracting much interest of the computer vision researchers, due to its potential applications in robotics. The state-of-the-art techniques for scene flow estimation, typically rely on the knowledge of scene structure of the frame and the correspondence between frames. However, with the increasing amount of RGB-D data captured from sophisticated sensors like Microsoft Kinect, and the recent advances in the area of sophisticated deep learning techniques, introduction of an efficient deep learning technique for scene flow estimation, is becoming important. This paper introduces a first effort to apply a deep learning method for direct estimation of scene flow by presenting a fully convolutional neural network with an encoder-decoder (ED) architecture. The proposed network SceneEDNet involves estimation of three dimensional motion vectors of all the scene points from sequence of stereo images. The training for direct estimation of scene flow is done using consecutive pairs of stereo images and corresponding scene flow ground truth. The proposed architecture is applied on a huge dataset and provides meaningful results.