 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpertMatcher: Automating ML Model Selection for Clients using Hidden Representations
Oct 09, 2019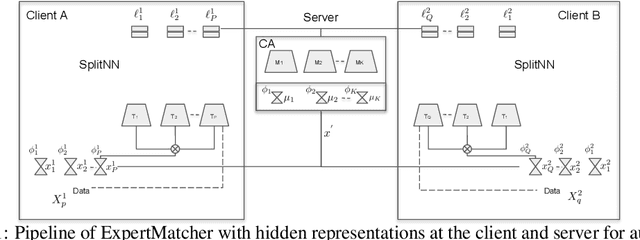

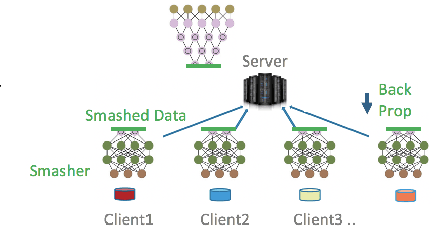
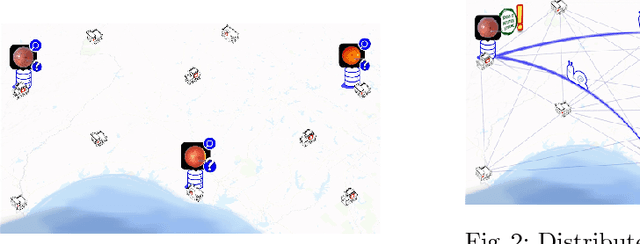
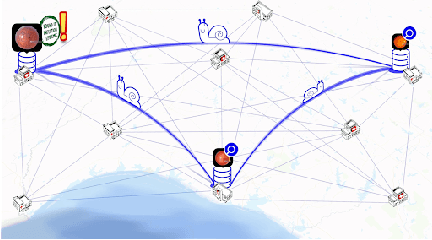
Recently, there has been the development of Split Learning, a framework for distributed computation where model components are split between the client and server (Vepakomma et al., 2018b). As Split Learning scales to include many different model components, there needs to be a method of matching client-side model components with the best server-side model components. A solution to this problem was introduced in the ExpertMatcher (Sharma et al., 2019) framework, which uses autoencoders to match raw data to models. In this work, we propose an extension of ExpertMatcher, where matching can be performed without the need to share the client's raw data representation. The technique is applicable to situations where there are local clients and centralized expert ML models, but the sharing of raw data is constrained.
ExpertMatcher: Automating ML Model Selection for Users in Resource Constrained Countries
Oct 05, 2019
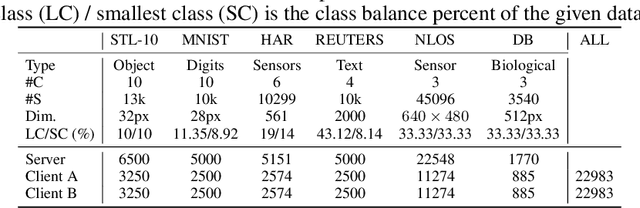
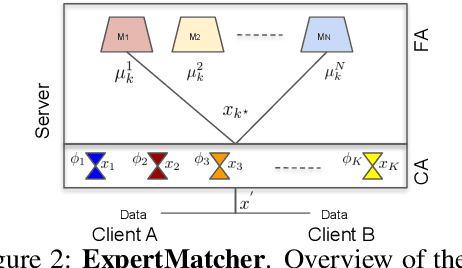
In this work we introduce ExpertMatcher, a method for automating deep learning model selection using autoencoders. Specifically, we are interested in performing inference on data sources that are distributed across many clients using pretrained expert ML networks on a centralized server. The ExpertMatcher assigns the most relevant model(s) in the central server given the client's data representation. This allows resource-constrained clients in developing countries to utilize the most relevant ML models for their given task without having to evaluate the performance of each ML model. The method is generic and can be beneficial in any setup where there are local clients and numerous centralized expert ML models.
Maximal adversarial perturbations for obfuscation: Hiding certain attributes while preserving rest
Sep 27, 2019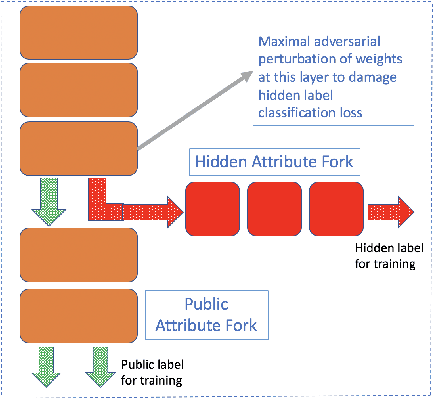
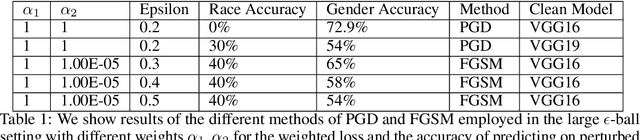
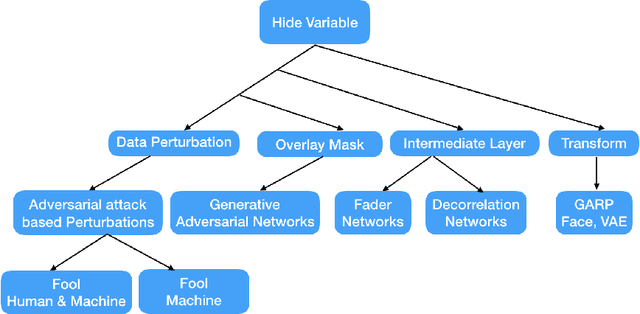
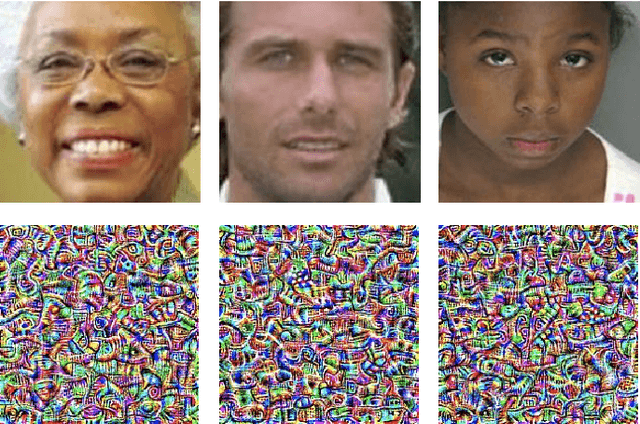
In this paper we investigate the usage of adversarial perturbations for the purpose of privacy from human perception and model (machine) based detection. We employ adversarial perturbations for obfuscating certain variables in raw data while preserving the rest. Current adversarial perturbation methods are used for data poisoning with minimal perturbations of the raw data such that the machine learning model's performance is adversely impacted while the human vision cannot perceive the difference in the poisoned dataset due to minimal nature of perturbations. We instead apply relatively maximal perturbations of raw data to conditionally damage model's classification of one attribute while preserving the model performance over another attribute. In addition, the maximal nature of perturbation helps adversely impact human perception in classifying hidden attribute apart from impacting model performance. We validate our result qualitatively by showing the obfuscated dataset and quantitatively by showing the inability of models trained on clean data to predict the hidden attribute from the perturbed dataset while being able to predict the rest of attributes.
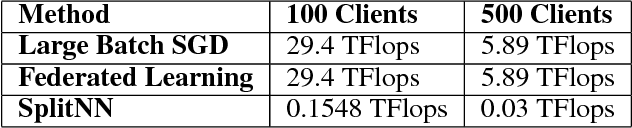
Detailed comparison of communication efficiency of split learning and federated learning
Sep 18, 2019
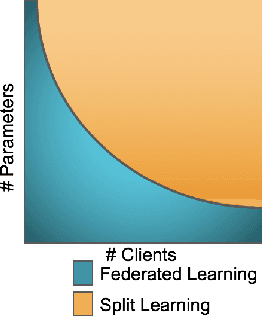
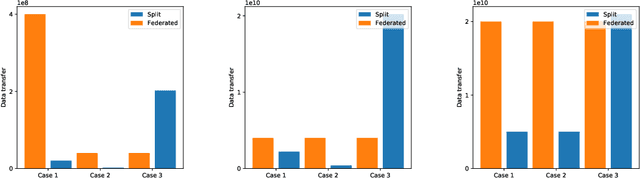
We compare communication efficiencies of two compelling distributed machine learning approaches of split learning and federated learning. We show useful settings under which each method outperforms the other in terms of communication efficiency. We consider various practical scenarios of distributed learning setup and juxtapose the two methods under various real-life scenarios. We consider settings of small and large number of clients as well as small models (1M - 6M parameters), large models (10M - 200M parameters) and very large models (1 Billion-100 Billion parameters). We show that increasing number of clients or increasing model size favors split learning setup over the federated while increasing the number of data samples while keeping the number of clients or model size low makes federated learning more communication efficient.
Data Markets to support AI for All: Pricing, Valuation and Governance
May 14, 2019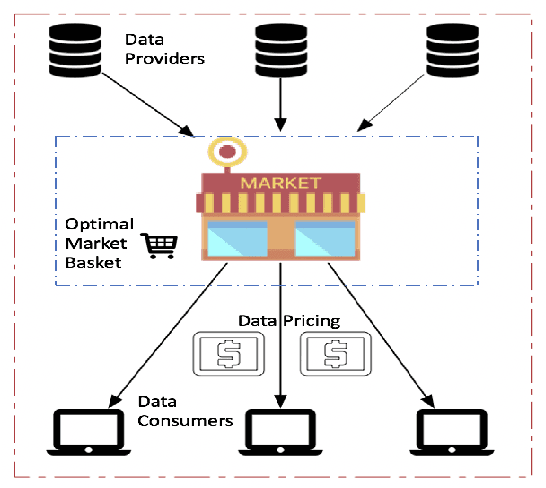
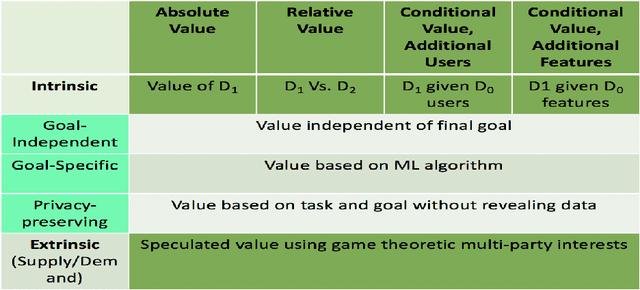
We discuss a data market technique based on intrinsic (relevance and uniqueness) as well as extrinsic value (influenced by supply and demand) of data. For intrinsic value, we explain how to perform valuation of data in absolute terms (i.e just by itself), or relatively (i.e in comparison to multiple datasets) or in conditional terms (i.e valuating new data given currently existing data).
Light-Field for RF
Jan 13, 2019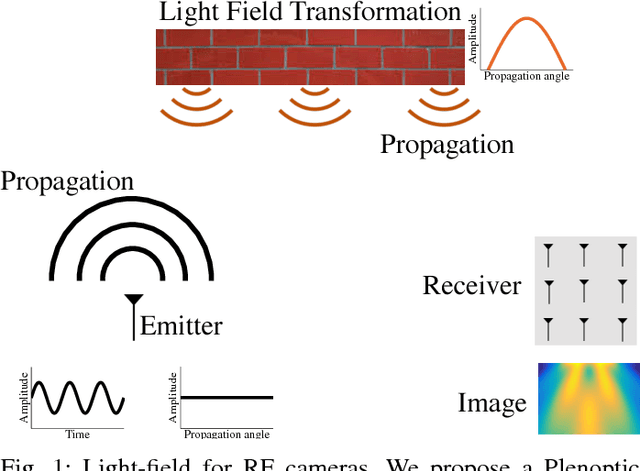
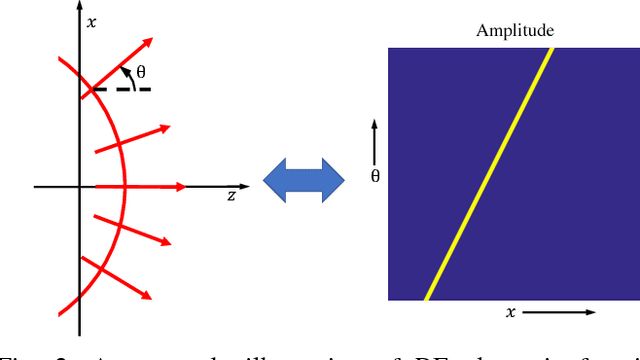
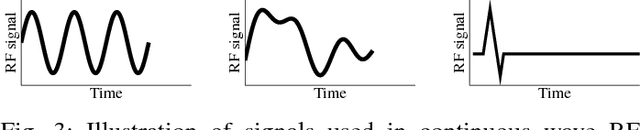
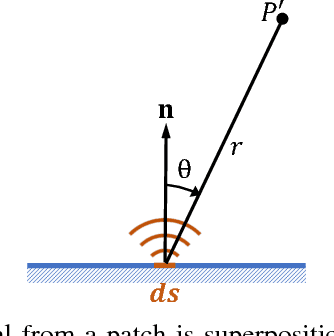
Most computer vision systems and computational photography systems are visible light based which is a small fraction of the electromagnetic (EM) spectrum. In recent years radio frequency (RF) hardware has become more widely available, for example, many cars are equipped with a RADAR, and almost every home has a WiFi device. In the context of imaging, RF spectrum holds many advantages compared to visible light systems. In particular, in this regime, EM energy effectively interacts in different ways with matter. This property allows for many novel applications such as privacy preserving computer vision and imaging through absorbing and scattering materials in visible light such as walls. Here, we expand many of the concepts in computational photography in visible light to RF cameras. The main limitation of imaging with RF is the large wavelength that limits the imaging resolution when compared to visible light. However, the output of RF cameras is usually processed by computer vision and perception algorithms which would benefit from multi-modal sensing of the environment, and from sensing in situations in which visible light systems fail. To bridge the gap between computational photography and RF imaging, we expand the concept of light-field to RF. This work paves the way to novel computational sensing systems with RF.
No Peek: A Survey of private distributed deep learning
Dec 08, 2018
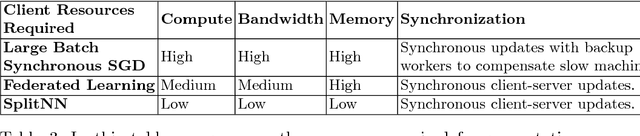
We survey distributed deep learning models for training or inference without accessing raw data from clients. These methods aim to protect confidential patterns in data while still allowing servers to train models. The distributed deep learning methods of federated learning, split learning and large batch stochastic gradient descent are compared in addition to private and secure approaches of differential privacy, homomorphic encryption, oblivious transfer and garbled circuits in the context of neural networks. We study their benefits, limitations and trade-offs with regards to computational resources, data leakage and communication efficiency and also share our anticipated future trends.
Split learning for health: Distributed deep learning without sharing raw patient data
Dec 03, 2018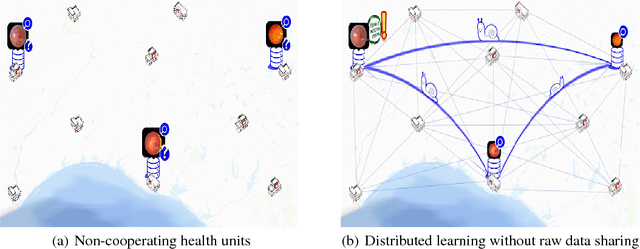
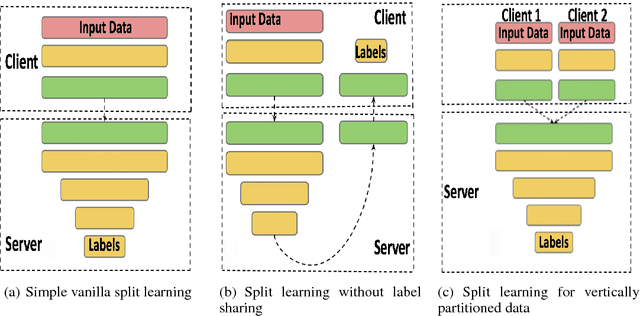
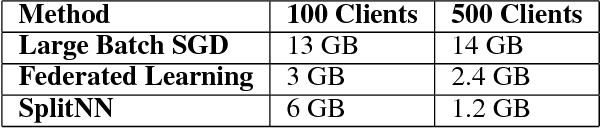
Can health entities collaboratively train deep learning models without sharing sensitive raw data? This paper proposes several configurations of a distributed deep learning method called SplitNN to facilitate such collaborations. SplitNN does not share raw data or model details with collaborating institutions. The proposed configurations of splitNN cater to practical settings of i) entities holding different modalities of patient data, ii) centralized and local health entities collaborating on multiple tasks and iii) learning without sharing labels. We compare performance and resource efficiency trade-offs of splitNN and other distributed deep learning methods like federated learning, large batch synchronous stochastic gradient descent and show highly encouraging results for splitNN.
Addressing the Invisible: Street Address Generation for Developing Countries with Deep Learning
Nov 10, 2018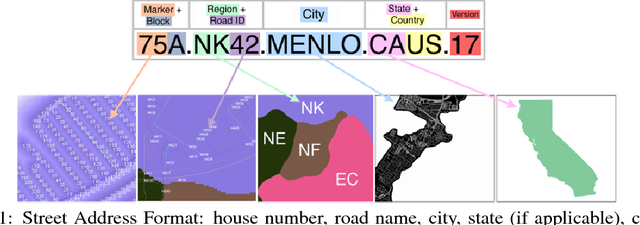
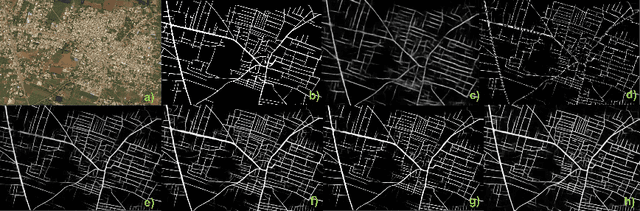
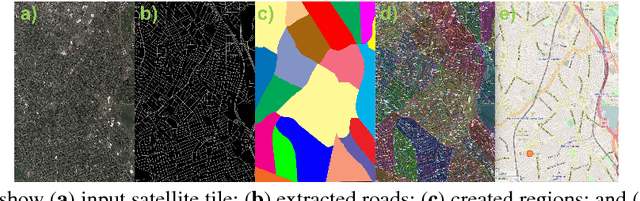
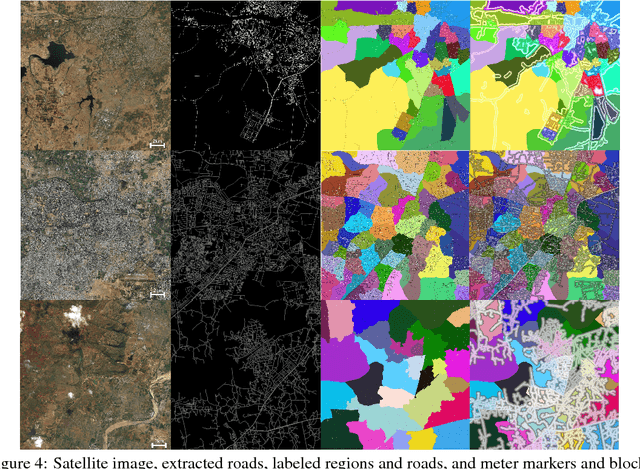
More than half of the world's roads lack adequate street addressing systems. Lack of addresses is even more visible in daily lives of people in developing countries. We would like to object to the assumption that having an address is a luxury, by proposing a generative address design that maps the world in accordance with streets. The addressing scheme is designed considering several traditional street addressing methodologies employed in the urban development scenarios around the world. Our algorithm applies deep learning to extract roads from satellite images, converts the road pixel confidences into a road network, partitions the road network to find neighborhoods, and labels the regions, roads, and address units using graph- and proximity-based algorithms. We present our results on a sample US city, and several developing cities, compare travel times of users using current ad hoc and new complete addresses, and contrast our addressing solution to current industrial and open geocoding alternatives.
3D Traffic Simulation for Autonomous Vehicles in Unity and Python
Oct 30, 2018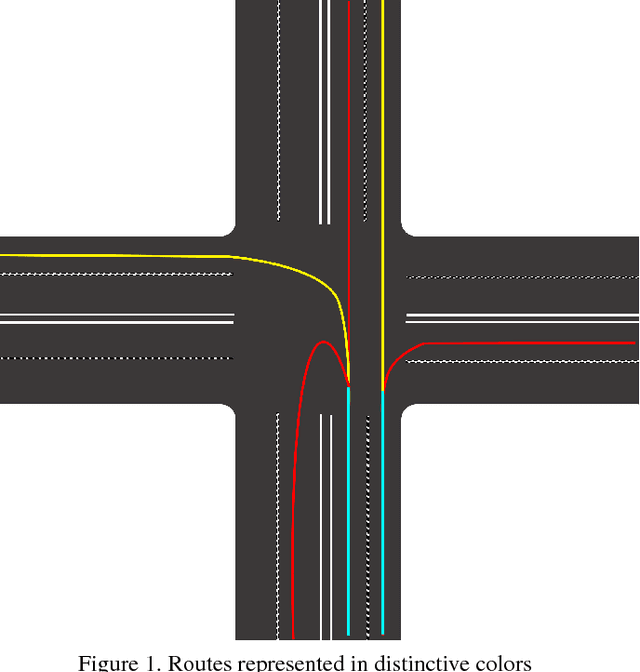
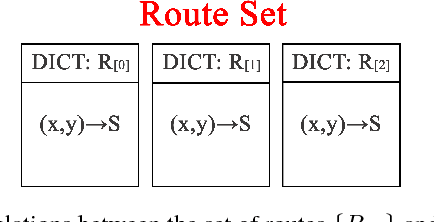
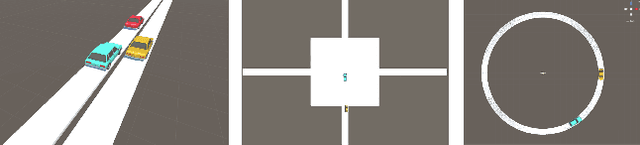
Over the recent years, there has been an explosion of studies on autonomous vehicles. Many collected large amount of data from human drivers. However, compared to the tedious data collection approach, building a virtual simulation of traffic makes the autonomous vehicle research more flexible, time-saving, and scalable. Our work features a 3D simulation that takes in real time position information parsed from street cameras. The simulation can easily switch between a global bird view of the traffic and a local perspective of a car. It can also filter out certain objects in its customized camera, creating various channels for objects of different categories. This provides alternative supervised or unsupervised ways to train deep neural networks. Another advantage of the 3D simulation is its conformation to physical laws. Its naturalness to accelerate and collide prepares the system for potential deep reinforcement learning needs.