 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Programmable Inference and ISAC at the 6GR Edge with dApps
Mar 31, 2026The convergence of communication, sensing, and Artificial Intelligence (AI) in the Radio Access Network (RAN) offers compelling economic advantages through shared spectrum and infrastructure. How can inference and sensing be integrated in the RAN infrastructure at a system level? Current abstractions in O-RAN and 3GPP lack the interfaces and capabilities to support (i) a dynamic life cycle for inference and Integrated Sensing and Communication (ISAC) algorithms, whose requirements and sensing targets may change over time and across sites; (ii) pipelines for AI-driven ISAC, which need complex data flows, training, and testing; (iii) dynamic device and stack configuration to balance trade-offs between connectivity, sensing, and inference services. This paper analyzes the role of a programmable, software-driven, open RAN in enabling the intelligent edge for 5G and 6G systems. We identify real-time user-plane data exposure, open interfaces for plug-and-play inference and ISAC models, closed-loop control, and AI pipelines as elements that evolutions of the O-RAN architecture can uniquely provide. Specifically, we describe how dApps - a real-time, user-plane extension of O-RAN - and a hierarchy of controllers enable real-time AI inference and ISAC. Experimental results on an open-source RAN testbed demonstrate the value of exposing I/Q samples and real-time RAN telemetry to dApps for sensing applications.
Bistatic Sensing in 5G NR
May 18, 2025



In this work, we propose and evaluate the performance of a 5th generation (5G) New Radio (NR) bistatic Integrated Sensing and Communication (ISaC) system. Unlike the full-duplex monostatic ISaC systems, the bistatic approach enables sensing in the current cellular networks without significantly modifying the transceiver design. The sensing utilizes data channels, such as the Physical Uplink Shared Channel (PUSCH), which carries information on the air interface. We provide the maximum likelihood estimator for the delay and Doppler parameters and derive a lower bound on the Mean Square Error (MSE) for a single target scenario. Link-level simulations show that it is possible to achieve significant throughput while accurately estimating the sensing parameters with PUSCH. Moreover, the results reveal an interesting tradeoff between the number of reference symbols, sensing performance, and throughput in the proposed 5G NR bistatic ISaC system.
Round Trip Time Estimation Utilizing Cyclic Shift of Uplink Reference Signal
Oct 06, 2024



In the context of fifth-generation new radio (5G NR) technology, it is not possible to directly obtain an absolute uplink (UL) channel impulse response (CIR) at the base station (gNB) from a user equipment (UE). The UL CIR obtained through the sounding reference signal (SRS) is always time-shifted by the timing advance (TA) applied at the UE. The TA is crucial for maintaining UL synchronization, and transmitting SRS without applying the TA will result in interference. In this work, we propose a new method to obtain absolute UL CIR from a UE and then use it to estimate the round trip time (RTT) at the gNB. This method requires enhancing the current 5G protocol stack with a new Zadoff-Chu (ZC) based wideband uplink reference signal (URS). Capitalizing on the cyclic shift property of the URS sequence, we can obtain the RTT with a significant reduction in overhead and latency compared to existing schemes. The proposed method is experimentally validated using a real-world testbed based on OpenAirInterface (OAI).
Listen-While-Talking: Toward dApp-based Real-Time Spectrum Sharing in O-RAN
Jul 06, 2024
This demo paper presents a dApp-based real-time spectrum sharing scenario where a 5th generation (5G) base station implementing the NR stack adapts its transmission and reception strategies based on the incumbent priority users in the Citizen Broadband Radio Service (CBRS) band. The dApp is responsible for obtaining relevant measurements from the Next Generation Node Base (gNB), running the spectrum sensing inference, and configuring the gNB with a control action upon detecting the primary incumbent user transmissions. This approach is built on dApps, which extend the O-RAN framework to the real-time and user plane domains. Thus, it avoids the need of dedicated Spectrum Access Systems (SASs) in the CBRS band. The demonstration setup is based on the open-source 5G OpenAirInterface (OAI) framework, where we have implemented a dApp interfaced with a gNB and communicating with a Commercial Off-the-Shelf (COTS) User Equipment (UE) in an over-the-air wireless environment. When an incumbent user has active transmission, the dApp will detect and inform the primary user presence to the gNB. The dApps will also enforce a control policy that adapts the scheduling and transmission policy of the Radio Access Network (RAN). This demo provides valuable insights into the potential of using dApp-based spectrum sensing with O-RAN architecture in next generation cellular networks.
Integrated Access and Backhaul in 5G with Aerial Distributed Unit using OpenAirInterface
May 11, 2023In this work, we demonstrate the Integrated Access and Backhaul (IAB) capabilities of an aerial robot offering 5G connectivity to ground users. The robot is integrated with a distributed unit (DU) and has 5G wireless backhaul access to a terrestrial central unit (CU). The CU-DU interface fully complies with the 3GPP defined F1 application protocol (F1AP). Such aerial robots can be instantiated and configured dynamically tailoring to the network demands. The complete radio and access network solution is based on open-source software from OpenAirInterface, and off-the-shelf commercial 5G mobile terminals. Experimental results illustrate throughput gains, coverage extension and dynamic adaptability nature of the aerial DU.
Sensing aided Channel Estimation in Wideband Millimeter-Wave MIMO Systems
Feb 04, 2023In this work, the uplink channel estimation problem is considered for a millimeter wave (mmWave) multi-input multi-output (MIMO) system. It is well known that pilot overhead and computation complexity in estimating the channel increases with the number of antennas and the bandwidth. To overcome this, the proposed approach allows the channel estimation at the base station to be aided by the sensing information. The sensing information contains an estimate of scatterers locations in an environment. A simultaneous weighting orthogonal matching pursuit (SWOMP) - sparse Bayesian learning (SBL) algorithm is proposed that efficiently incorporates this sensing information in the communication channel estimation procedure. The proposed framework can cope with scenarios where a) scatterers present in the sensing information are not associated with the communication channel and b) imperfections in the scatterers' location. Simulation results show that the proposed sensing aided channel estimation algorithm can obtain good wideband performance only at the cost of fractional pilot overhead. Finally, the Cramer-Rao Bound (CRB) for the angle estimation and multipath channel gains in the SBL is derived, providing valuable insights into the local identifiability of the proposed algorithms.
UAV-aided RF Mapping for Sensing and Connectivity in Wireless Networks
May 06, 2022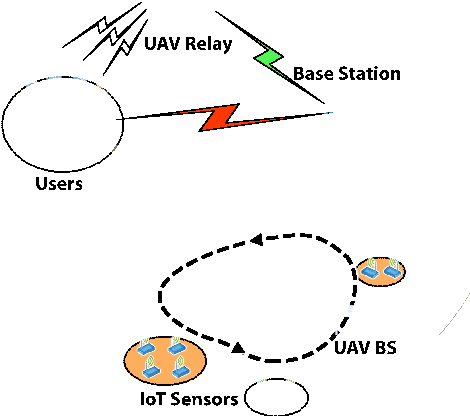
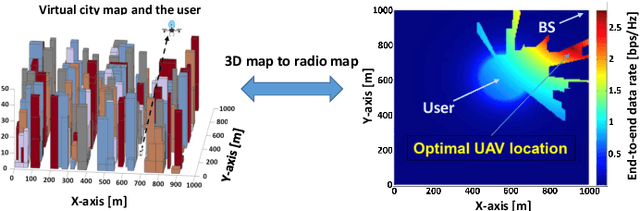
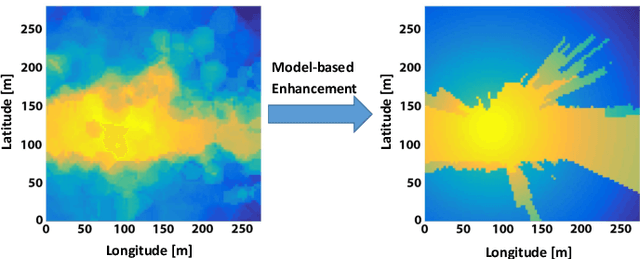
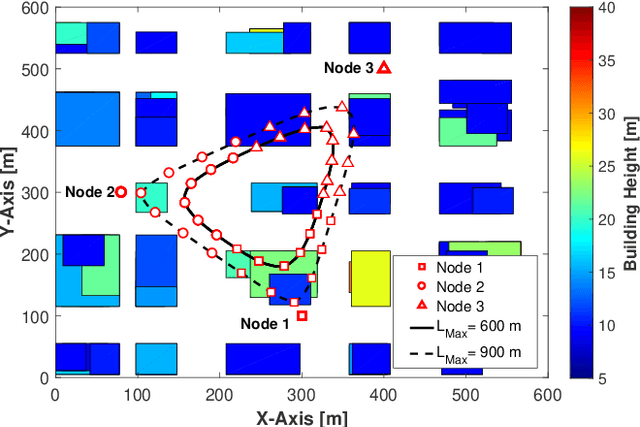
The use of unmanned aerial vehicles (UAV) as flying radio access network (RAN) nodes offers a promising complement to traditional fixed terrestrial deployments. More recently yet still in the context of wireless networks, drones have also been envisioned for use as radio frequency (RF) sensing and localization devices. In both cases, the advantage of using UAVs lies in their ability to navigate themselves freely in 3D and in a timely manner to locations of space where the obtained network throughput or sensing performance is optimal. In practice, the selection of a proper location or trajectory for the UAV very much depends on local terrain features, including the position of surrounding radio obstacles. Hence, the robot must be able to map the features of its radio environment as it performs its data communication or sensing services. The challenges related to this task, referred here as radio mapping, are discussed in this paper. Its promises related to efficient trajectory design for autonomous radio-aware UAVs are highlighted, along with algorithm solutions. The advantages induced by radio-mapping in terms of connectivity, sensing, and localization performance are illustrated.
UAV-aided Wireless Node Localization Using Hybrid Radio Channel Models
May 06, 2022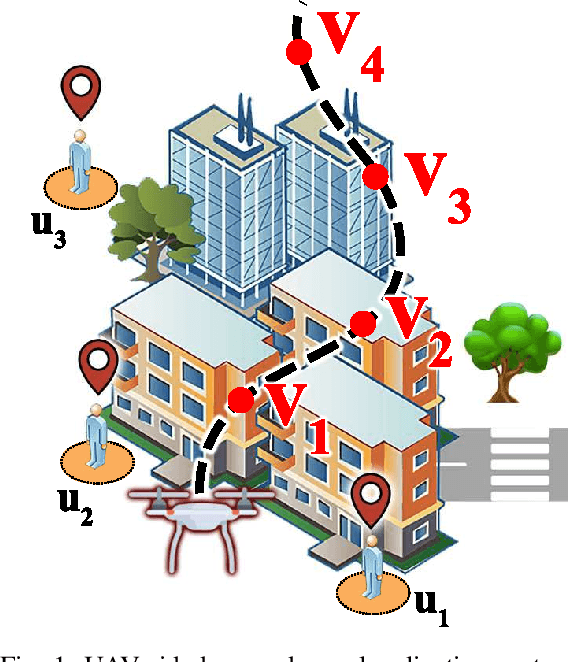
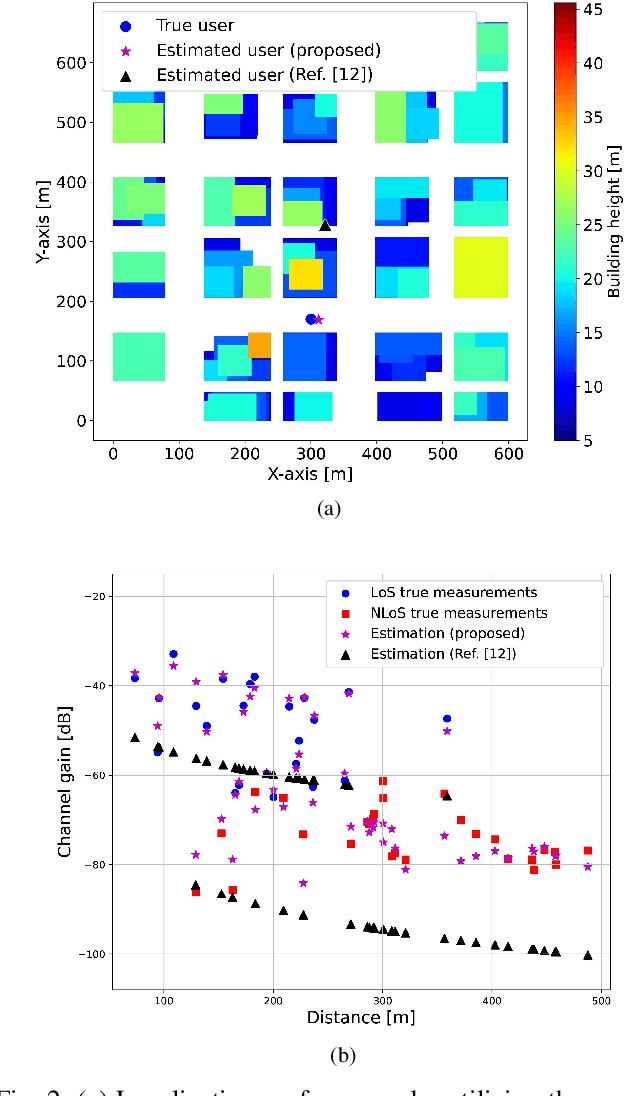
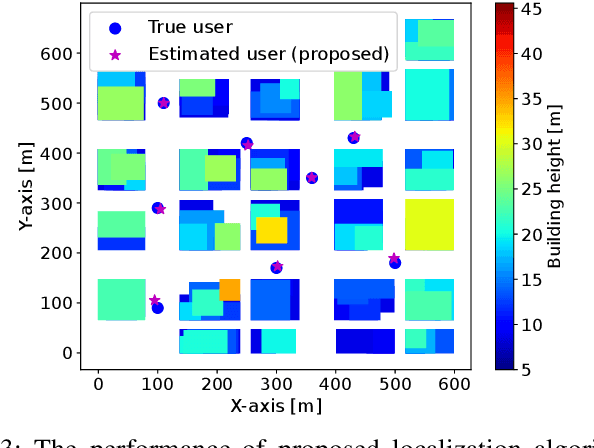
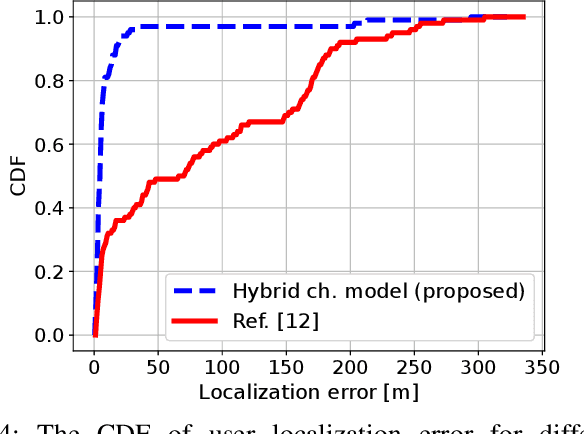
This paper considers the problem of ground user localization based on received signal strength (RSS) measurements obtained by an unmanned aerial vehicle (UAV). We treat UAV-user link channel model parameters and antenna radiation pattern of the UAV as unknowns that need to be estimated. A hybrid channel model is proposed that consists of a traditional path loss model combined with a neural network approximating the UAV antenna gain function. With this model and a set of offline RSS measurements, the unknown parameters are estimated. We then employ the particle swarm optimization (PSO) technique which utilizes the learned hybrid channel model along with a 3D map of the environment to accurately localize the ground users. The performance of the developed algorithm is evaluated through simulations and also real-world experiments.