 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNot All Trust is the Same: Effects of Decision Workflow and Explanations in Human-AI Decision Making
Mar 05, 2026A central challenge in AI-assisted decision making is achieving warranted, well-calibrated trust. Both overtrust (accepting incorrect AI recommendations) and undertrust (rejecting correct advice) should be prevented. Prior studies differ in the design of the decision workflow - whether users see the AI suggestion immediately (1-step setup) or have to submit a first decision beforehand (2-step setup) -, and in how trust is measured - through self-reports or as behavioral trust, that is, reliance. We examined the effects and interactions of (a) the type of decision workflow, (b) the presence of explanations, and (c) users' domain knowledge and prior AI experience. We compared reported trust, reliance (agreement rate and switch rate), and overreliance. Results showed no evidence that a 2-step setup reduces overreliance. The decision workflow also did not directly affect self-reported trust, but there was a crossover interaction effect with domain knowledge and explanations, suggesting that the effects of explanations alone may not generalize across workflow setups. Finally, our findings confirm that reported trust and reliance behavior are distinct constructs that should be evaluated separately in AI-assisted decision making.
Breathe with Me: Synchronizing Biosignals for User Embodiment in Robots
Dec 16, 2025Embodiment of users within robotic systems has been explored in human-robot interaction, most often in telepresence and teleoperation. In these applications, synchronized visuomotor feedback can evoke a sense of body ownership and agency, contributing to the experience of embodiment. We extend this work by employing embreathment, the representation of the user's own breath in real time, as a means for enhancing user embodiment experience in robots. In a within-subjects experiment, participants controlled a robotic arm, while its movements were either synchronized or non-synchronized with their own breath. Synchrony was shown to significantly increase body ownership, and was preferred by most participants. We propose the representation of physiological signals as a novel interoceptive pathway for human-robot interaction, and discuss implications for telepresence, prosthetics, collaboration with robots, and shared autonomy.
Can AI Explanations Make You Change Your Mind?
Aug 11, 2025



In the context of AI-based decision support systems, explanations can help users to judge when to trust the AI's suggestion, and when to question it. In this way, human oversight can prevent AI errors and biased decision-making. However, this rests on the assumption that users will consider explanations in enough detail to be able to catch such errors. We conducted an online study on trust in explainable DSS, and were surprised to find that in many cases, participants spent little time on the explanation and did not always consider it in detail. We present an exploratory analysis of this data, investigating what factors impact how carefully study participants consider AI explanations, and how this in turn impacts whether they are open to changing their mind based on what the AI suggests.
The Wilhelm Tell Dataset of Affordance Demonstrations
Jul 23, 2025Affordances - i.e. possibilities for action that an environment or objects in it provide - are important for robots operating in human environments to perceive. Existing approaches train such capabilities on annotated static images or shapes. This work presents a novel dataset for affordance learning of common household tasks. Unlike previous approaches, our dataset consists of video sequences demonstrating the tasks from first- and third-person perspectives, along with metadata about the affordances that are manifested in the task, and is aimed towards training perception systems to recognize affordance manifestations. The demonstrations were collected from several participants and in total record about seven hours of human activity. The variety of task performances also allows studying preparatory maneuvers that people may perform for a task, such as how they arrange their task space, which is also relevant for collaborative service robots.
* \c{opyright} 2025 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Foundations of the Socio-physical Model of Activities for Autonomous Robotic Agents
Nov 24, 2020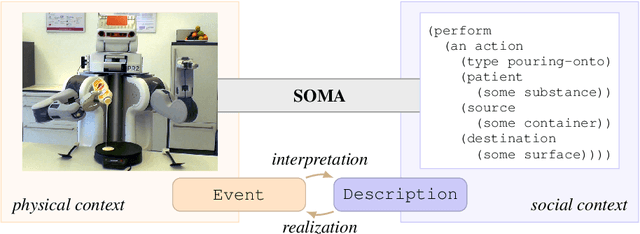
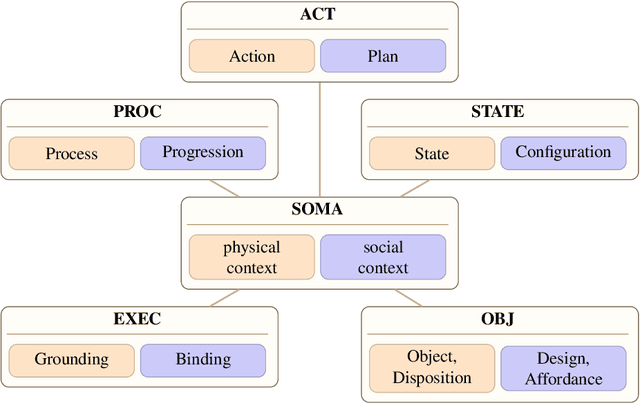
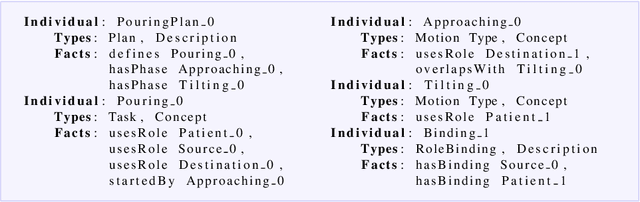
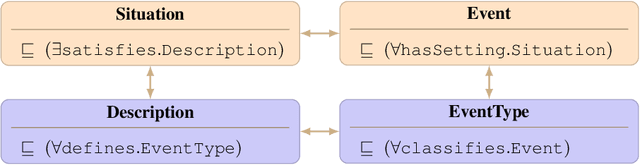
In this paper, we present foundations of the Socio-physical Model of Activities (SOMA). SOMA represents both the physical as well as the social context of everyday activities. Such tasks seem to be trivial for humans, however, they pose severe problems for artificial agents. For starters, a natural language command requesting something will leave many pieces of information necessary for performing the task unspecified. Humans can solve such problems fast as we reduce the search space by recourse to prior knowledge such as a connected collection of plans that describe how certain goals can be achieved at various levels of abstraction. Rather than enumerating fine-grained physical contexts SOMA sets out to include socially constructed knowledge about the functions of actions to achieve a variety of goals or the roles objects can play in a given situation. As the human cognition system is capable of generalizing experiences into abstract knowledge pieces applicable to novel situations, we argue that both physical and social context need be modeled to tackle these challenges in a general manner. This is represented by the link between the physical and social context in SOMA where relationships are established between occurrences and generalizations of them, which has been demonstrated in several use cases that validate SOMA.