 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing Ambiguity in Imitation Learning through Product of Experts based Negative Feedback
Mar 27, 2026Programming robots to perform complex tasks is often difficult and time consuming, requiring expert knowledge and skills in robot software and sometimes hardware. Imitation learning is a method for training robots to perform tasks by leveraging human expertise through demonstrations. Typically, the assumption is that those demonstrations are performed by a single, highly competent expert. However, in many real-world applications that use user demonstrations for tasks or incorporate both user data and pretrained data, such as home robotics including assistive robots, this is unlikely to be the case. This paper presents research towards a system which can leverage suboptimal demonstrations to solve ambiguous tasks; and particularly learn from its own failures. This is a negative-feedback system which achieves significant improvement over purely positive imitation learning for ambiguous tasks, achieving a 90% improvement in success rate against a system that does not utilise negative feedback, compared to a 50% improvement in success rate when utilised on a real robot, as well as demonstrating higher efficacy, memory efficiency and time efficiency than a comparable negative feedback scheme. The novel scheme presented in this paper is validated through simulated and real-robot experiments.
Foundations of the Socio-physical Model of Activities for Autonomous Robotic Agents
Nov 24, 2020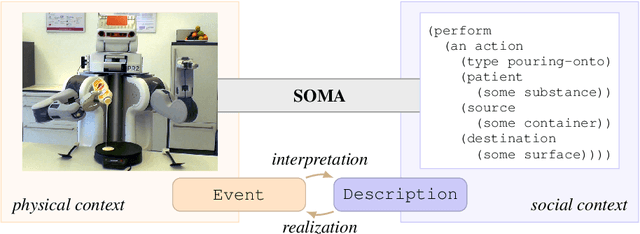
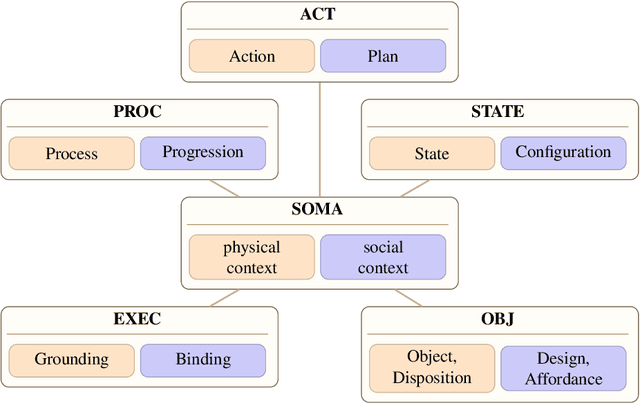
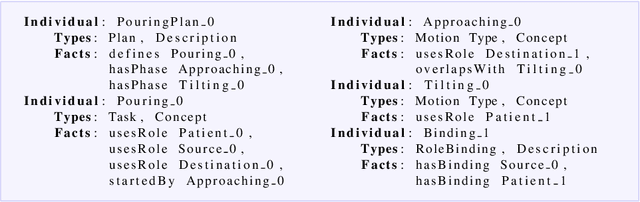
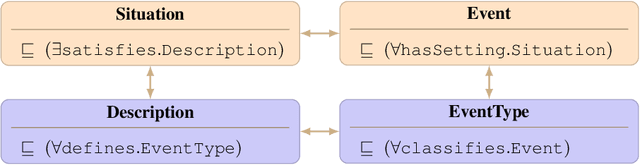
In this paper, we present foundations of the Socio-physical Model of Activities (SOMA). SOMA represents both the physical as well as the social context of everyday activities. Such tasks seem to be trivial for humans, however, they pose severe problems for artificial agents. For starters, a natural language command requesting something will leave many pieces of information necessary for performing the task unspecified. Humans can solve such problems fast as we reduce the search space by recourse to prior knowledge such as a connected collection of plans that describe how certain goals can be achieved at various levels of abstraction. Rather than enumerating fine-grained physical contexts SOMA sets out to include socially constructed knowledge about the functions of actions to achieve a variety of goals or the roles objects can play in a given situation. As the human cognition system is capable of generalizing experiences into abstract knowledge pieces applicable to novel situations, we argue that both physical and social context need be modeled to tackle these challenges in a general manner. This is represented by the link between the physical and social context in SOMA where relationships are established between occurrences and generalizations of them, which has been demonstrated in several use cases that validate SOMA.