 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Level Insights from Eigenvalues across Sequence Models
Oct 10, 2025



Although softmax attention drives state-of-the-art performance for sequence models, its quadratic complexity limits scalability, motivating linear alternatives such as state space models (SSMs). While these alternatives improve efficiency, their fundamental differences in information processing remain poorly understood. In this work, we leverage the recently proposed dynamical systems framework to represent softmax, norm and linear attention as dynamical systems, enabling a structured comparison with SSMs by analyzing their respective eigenvalue spectra. Since eigenvalues capture essential aspects of dynamical system behavior, we conduct an extensive empirical analysis across diverse sequence models and benchmarks. We first show that eigenvalues influence essential aspects of memory and long-range dependency modeling, revealing spectral signatures that align with task requirements. Building on these insights, we then investigate how architectural modifications in sequence models impact both eigenvalue spectra and task performance. This correspondence further strengthens the position of eigenvalue analysis as a principled metric for interpreting, understanding, and ultimately improving the capabilities of sequence models.
ZipMPC: Compressed Context-Dependent MPC Cost via Imitation Learning
Jul 17, 2025The computational burden of model predictive control (MPC) limits its application on real-time systems, such as robots, and often requires the use of short prediction horizons. This not only affects the control performance, but also increases the difficulty of designing MPC cost functions that reflect the desired long-term objective. This paper proposes ZipMPC, a method that imitates a long-horizon MPC behaviour by learning a compressed and context-dependent cost function for a short-horizon MPC. It improves performance over alternative methods, such as approximate explicit MPC and automatic cost parameter tuning, in particular in terms of i) optimizing the long term objective; ii) maintaining computational costs comparable to a short-horizon MPC; iii) ensuring constraint satisfaction; and iv) generalizing control behaviour to environments not observed during training. For this purpose, ZipMPC leverages the concept of differentiable MPC with neural networks to propagate gradients of the imitation loss through the MPC optimization. We validate our proposed method in simulation and real-world experiments on autonomous racing. ZipMPC consistently completes laps faster than selected baselines, achieving lap times close to the long-horizon MPC baseline. In challenging scenarios where the short-horizon MPC baseline fails to complete a lap, ZipMPC is able to do so. In particular, these performance gains are also observed on tracks unseen during training.
Chronos and CRS: Design of a miniature car-like robot and a software framework for single and multi-agent robotics and control
Sep 24, 2022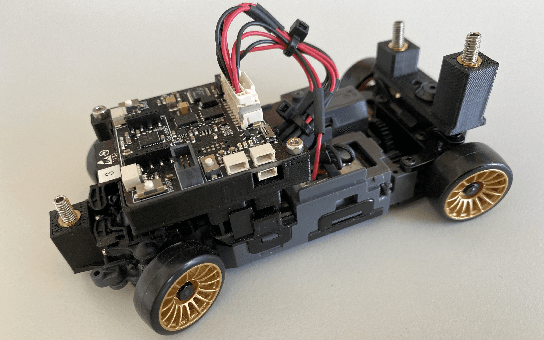
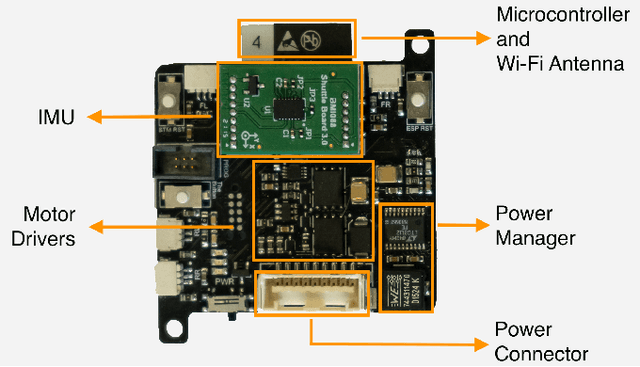
From both an educational and research point of view, experiments on hardware are a key aspect of robotics and control. In the last decade, many open-source hardware and software frameworks for wheeled robots have been presented, mainly in the form of unicycles and car-like robots, with the goal of making robotics accessible to a wider audience and to support control systems development. Unicycles are usually small and inexpensive, and therefore facilitate experiments in a larger fleet, but they are not suited for high-speed motion. Car-like robots are more agile, but they are usually larger and more expensive, thus requiring more resources in terms of space and money. In order to bridge this gap, we present Chronos, a new car-like 1/28th scale robot with customized open-source electronics, and CRS, an open-source software framework for control and robotics. The CRS software framework includes the implementation of various state-of-the-art algorithms for control, estimation, and multi-agent coordination. With this work, we aim to provide easier access to hardware and reduce the engineering time needed to start new educational and research projects.