 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Nonparametric Bayesian Model for Sparse Temporal Multigraphs
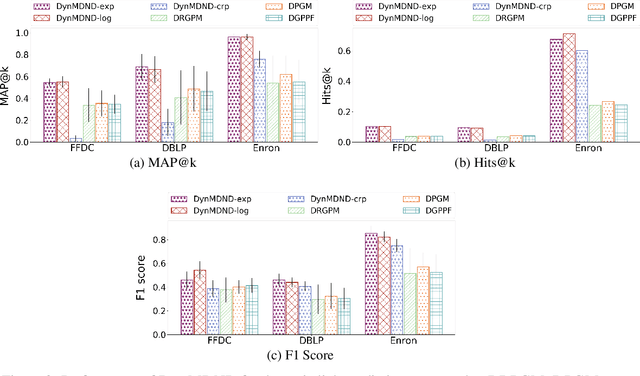
Oct 11, 2019As the availability and importance of temporal interaction data--such as email communication--increases, it becomes increasingly important to understand the underlying structure that underpins these interactions. Often these interactions form a multigraph, where we might have multiple interactions between two entities. Such multigraphs tend to be sparse yet structured, and their distribution often evolves over time. Existing statistical models with interpretable parameters can capture some, but not all, of these properties. We propose a dynamic nonparametric model for interaction multigraphs that combines the sparsity of edge-exchangeable multigraphs with dynamic clustering patterns that tend to reinforce recent behavioral patterns. We show that our method yields improved held-out likelihood over stationary variants, and impressive predictive performance against a range of state-of-the-art dynamic graph models.
Neural Simplex Architecture
Aug 01, 2019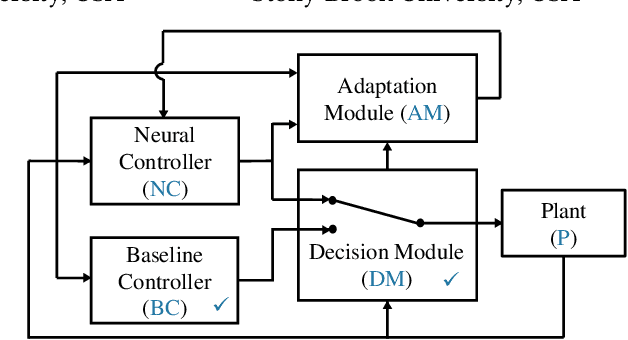
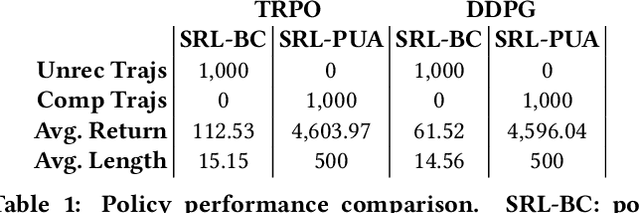
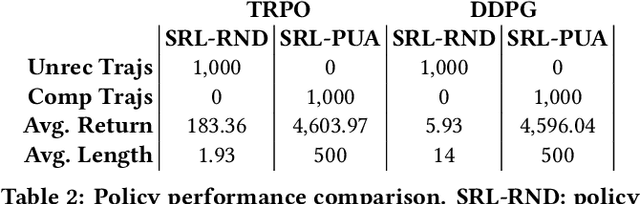
We present the Neural Simplex Architecture (NSA), a new approach to runtime assurance that provides safety guarantees for neural controllers (obtained e.g. using reinforcement learning) of complex autonomous and other cyber-physical systems without unduly sacrificing performance. NSA is inspired by the Simplex control architecture of Sha et al., but with some significant differences. In the traditional Simplex approach, the advanced controller (AC) is treated as a black box; there are no techniques for correcting the AC after it generates a potentially unsafe control input that causes a failover to the BC. Our NSA addresses this limitation. NSA not only provides safety assurances for CPSs in the presence of a possibly faulty neural controller, but can also improve the safety of such a controller in an online setting via retraining, without degrading its performance. NSA also offers reverse switching strategies, which allow the AC to resume control of the system under reasonable conditions, allowing the mission to continue unabated. Our experimental results on several significant case studies, including a target-seeking ground rover navigating an obstacle field and a neural controller for an artificial pancreas system, demonstrate NSA's benefits.
Dynamic Nonparametric Edge-Clustering Model for Time-Evolving Sparse Networks
May 29, 2019
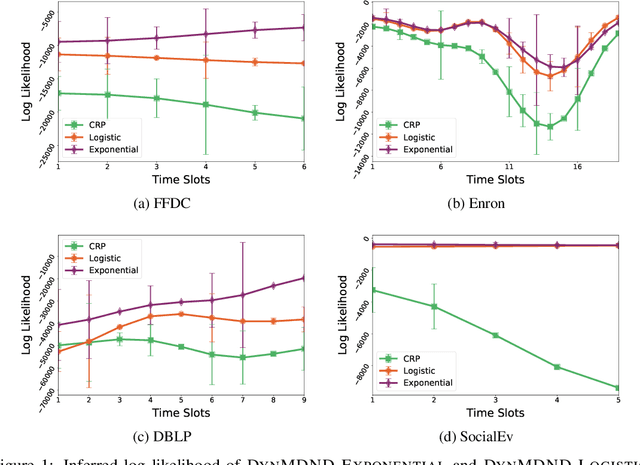
Interaction graphs, such as those recording emails between individuals or transactions between institutions, tend to be sparse yet structured, and often grow in an unbounded manner. Such behavior can be well-captured by structured, nonparametric edge-exchangeable graphs. However, such exchangeable models necessarily ignore temporal dynamics in the network. We propose a dynamic nonparametric model for interaction graphs that combine the sparsity of the exchangeable models with dynamic clustering patterns that tend to reinforce recent behavioral patterns. We show that our method yields improved held-out likelihood over stationary variants, and impressive predictive performance against a range of state-of-the-art dynamic interaction graph models.
A Roadmap Towards Resilient Internet of Things for Cyber-Physical Systems
Nov 06, 2018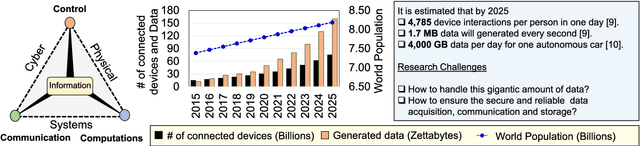
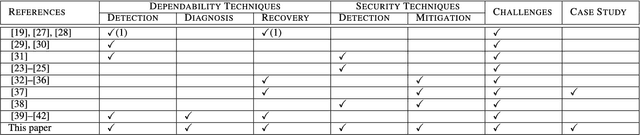
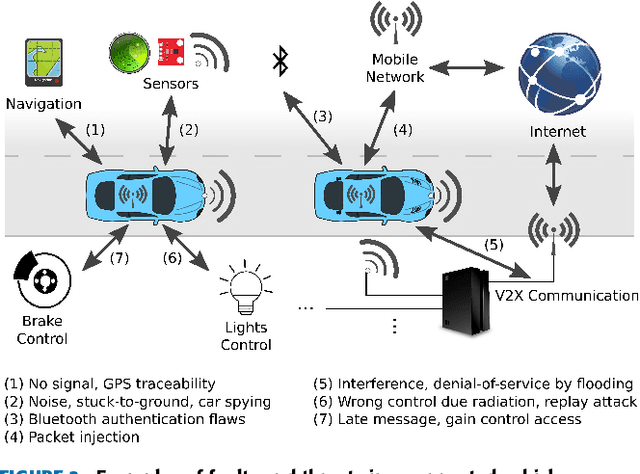

The Internet of Things (IoT) is a ubiquitous system connecting many different devices - the things - which can be accessed from the distance. The cyber-physical systems (CPS) monitor and control the things from the distance. As a result, the concepts of dependability and security get deeply intertwined. The increasing level of dynamicity, heterogeneity, and complexity adds to the system's vulnerability, and challenges its ability to react to faults. This paper summarizes state-of-the-art of existing work on anomaly detection, fault-tolerance and self-healing, and adds a number of other methods applicable to achieve resilience in an IoT. We particularly focus on non-intrusive methods ensuring data integrity in the network. Furthermore, this paper presents the main challenges in building a resilient IoT for CPS which is crucial in the era of smart CPS with enhanced connectivity (an excellent example of such a system is connected autonomous vehicles). It further summarizes our solutions, work-in-progress and future work to this topic to enable "Trustworthy IoT for CPS". Finally, this framework is illustrated on a selected use case: A smart sensor infrastructure in the transport domain.
Liquid Time-constant Recurrent Neural Networks as Universal Approximators
Nov 01, 2018In this paper, we introduce the notion of liquid time-constant (LTC) recurrent neural networks (RNN)s, a subclass of continuous-time RNNs, with varying neuronal time-constant realized by their nonlinear synaptic transmission model. This feature is inspired by the communication principles in the nervous system of small species. It enables the model to approximate continuous mapping with a small number of computational units. We show that any finite trajectory of an $n$-dimensional continuous dynamical system can be approximated by the internal state of the hidden units and $n$ output units of an LTC network. Here, we also theoretically find bounds on their neuronal states and varying time-constant.
Re-purposing Compact Neuronal Circuit Policies to Govern Reinforcement Learning Tasks
Sep 11, 2018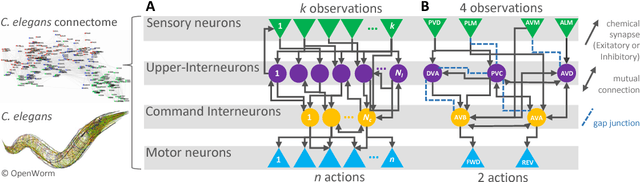


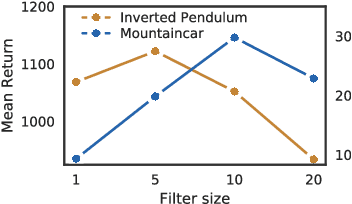
We propose an effective method for creating interpretable control agents, by \textit{re-purposing} the function of a biological neural circuit model, to govern simulated and real world reinforcement learning (RL) test-beds. Inspired by the structure of the nervous system of the soil-worm, \emph{C. elegans}, we introduce \emph{Neuronal Circuit Policies} (NCPs) as a novel recurrent neural network instance with liquid time-constants, universal approximation capabilities and interpretable dynamics. We theoretically show that they can approximate any finite simulation time of a given continuous n-dimensional dynamical system, with $n$ output units and some hidden units. We model instances of the policies and learn their synaptic and neuronal parameters to control standard RL tasks and demonstrate its application for autonomous parking of a real rover robot on a pre-defined trajectory. For reconfiguration of the \emph{purpose} of the neural circuit, we adopt a search-based RL algorithm. We show that our neuronal circuit policies perform as good as deep neural network policies with the advantage of realizing interpretable dynamics at the cell-level. We theoretically find bounds for the time-varying dynamics of the circuits, and introduce a novel way to reason about networks' dynamics.
Response Characterization for Auditing Cell Dynamics in Long Short-term Memory Networks
Sep 11, 2018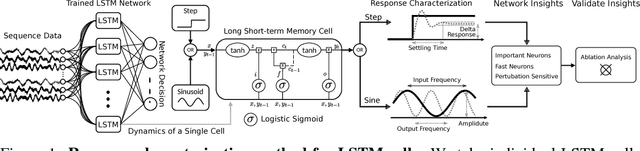
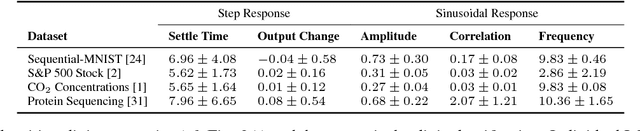
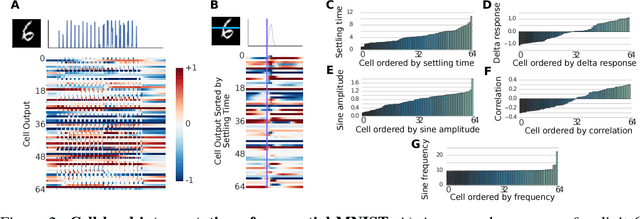

In this paper, we introduce a novel method to interpret recurrent neural networks (RNNs), particularly long short-term memory networks (LSTMs) at the cellular level. We propose a systematic pipeline for interpreting individual hidden state dynamics within the network using response characterization methods. The ranked contribution of individual cells to the network's output is computed by analyzing a set of interpretable metrics of their decoupled step and sinusoidal responses. As a result, our method is able to uniquely identify neurons with insightful dynamics, quantify relationships between dynamical properties and test accuracy through ablation analysis, and interpret the impact of network capacity on a network's dynamical distribution. Finally, we demonstrate generalizability and scalability of our method by evaluating a series of different benchmark sequential datasets.
Neural State Classification for Hybrid Systems
Jul 26, 2018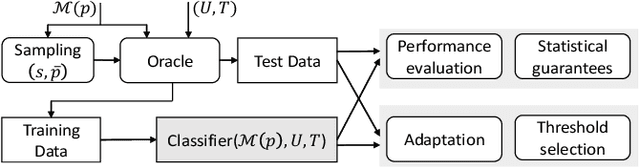
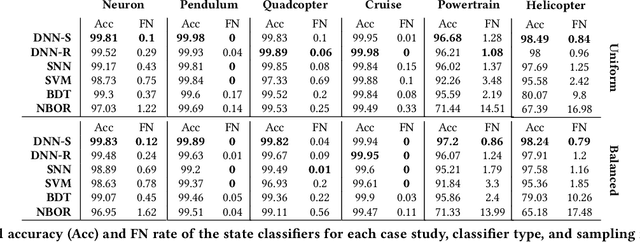
We introduce the State Classification Problem (SCP) for hybrid systems, and present Neural State Classification (NSC) as an efficient solution technique. SCP generalizes the model checking problem as it entails classifying each state $s$ of a hybrid automaton as either positive or negative, depending on whether or not $s$ satisfies a given time-bounded reachability specification. This is an interesting problem in its own right, which NSC solves using machine-learning techniques, Deep Neural Networks in particular. State classifiers produced by NSC tend to be very efficient (run in constant time and space), but may be subject to classification errors. To quantify and mitigate such errors, our approach comprises: i) techniques for certifying, with statistical guarantees, that an NSC classifier meets given accuracy levels; ii) tuning techniques, including a novel technique based on adversarial sampling, that can virtually eliminate false negatives (positive states classified as negative), thereby making the classifier more conservative. We have applied NSC to six nonlinear hybrid system benchmarks, achieving an accuracy of 99.25% to 99.98%, and a false-negative rate of 0.0033 to 0, which we further reduced to 0.0015 to 0 after tuning the classifier. We believe that this level of accuracy is acceptable in many practical applications, and that these results demonstrate the promise of the NSC approach.
Dynamic Network Model from Partial Observations
Jun 18, 2018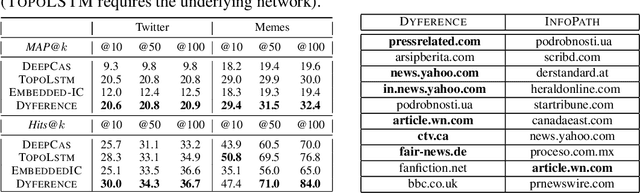
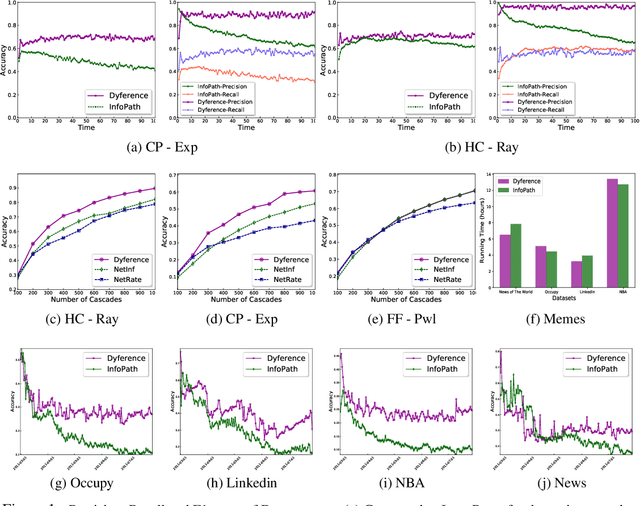
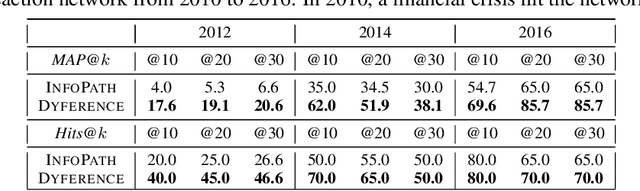
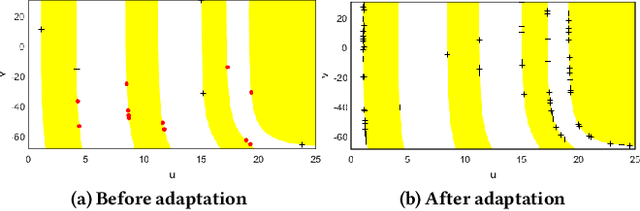
Can evolving networks be inferred and modeled without directly observing their nodes and edges? In many applications, the edges of a dynamic network might not be observed, but one can observe the dynamics of stochastic cascading processes (e.g., information diffusion, virus propagation) occurring over the unobserved network. While there have been efforts to infer networks based on such data, providing a generative probabilistic model that is able to identify the underlying time-varying network remains an open question. Here we consider the problem of inferring generative dynamic network models based on network cascade diffusion data. We propose a novel framework for providing a non-parametric dynamic network model--based on a mixture of coupled hierarchical Dirichlet processes-- based on data capturing cascade node infection times. Our approach allows us to infer the evolving community structure in networks and to obtain an explicit predictive distribution over the edges of the underlying network--including those that were not involved in transmission of any cascade, or are likely to appear in the future. We show the effectiveness of our approach using extensive experiments on synthetic as well as real-world networks.
Neuronal Circuit Policies
Mar 22, 2018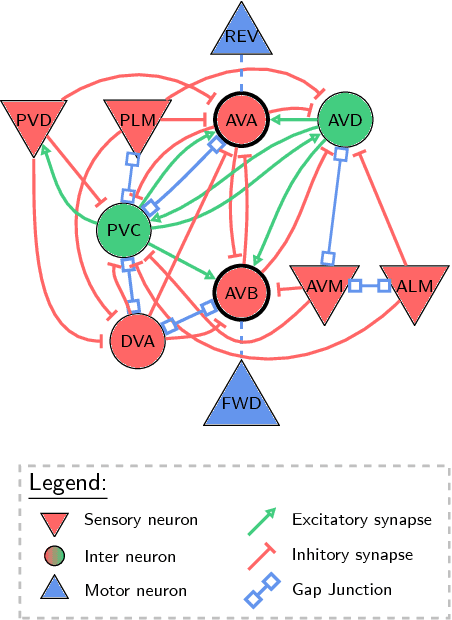
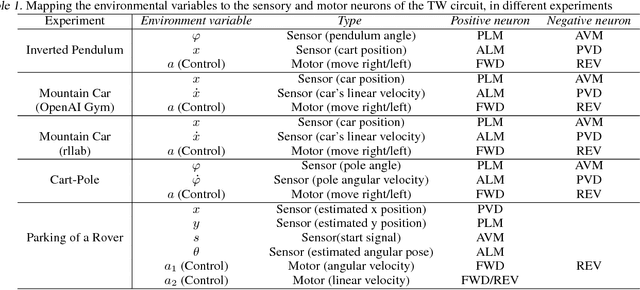
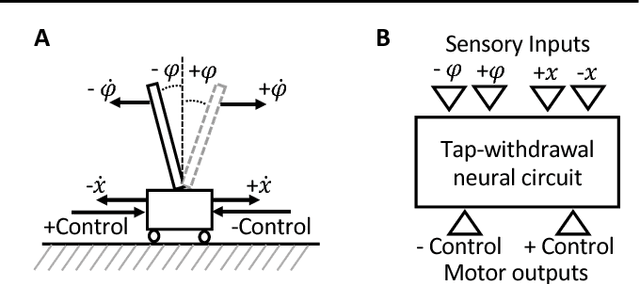
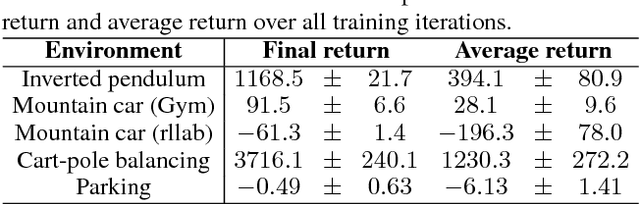
We propose an effective way to create interpretable control agents, by re-purposing the function of a biological neural circuit model, to govern simulated and real world reinforcement learning (RL) test-beds. We model the tap-withdrawal (TW) neural circuit of the nematode, C. elegans, a circuit responsible for the worm's reflexive response to external mechanical touch stimulations, and learn its synaptic and neuronal parameters as a policy for controlling basic RL tasks. We also autonomously park a real rover robot on a pre-defined trajectory, by deploying such neuronal circuit policies learned in a simulated environment. For reconfiguration of the purpose of the TW neural circuit, we adopt a search-based RL algorithm. We show that our neuronal policies perform as good as deep neural network policies with the advantage of realizing interpretable dynamics at the cell level.