 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAC Learning with Bandit Feedback: Sharp Sample Complexity in the Realizable Setting
May 26, 2026We study the problem of multiclass PAC learning with bandit feedback in the realizable setting. In this framework, there is an unknown data distribution over an instance space $\mathcal{X}$ and a label space $\mathcal{Y}$, as in classical multiclass PAC learning, but the learner does not observe the labels of the i.i.d. training examples. Instead, in each round, it receives an unlabeled instance, predicts its label, and receives bandit feedback indicating only whether the prediction is correct. Despite this restriction, the goal remains the same as in classical PAC learning. We provide a general characterization of the optimal sample complexity of this problem, sharp for every concept class up to logarithmic factors. Our characterization is based on a new combinatorial dimension, termed the bandit $\mathrm{DS}$ dimension, defined via generalized combinatorial structures we call pseudo-boxes. These extend the pseudo-cubes underlying the $\mathrm{DS}$ dimension by allowing a different number of neighbors in each coordinate. In contrast to the $\mathrm{DS}$ dimension, which governs the full-information setting by counting the number of coordinates in the pseudo-cube, the bandit $\mathrm{DS}$ dimension aggregates the number of neighbors across coordinates, leading to a characterization in which the sample complexity scales with the total number of neighbors. We also propose a general learning algorithm achieving the upper bound, based on an algorithmic principle called ListCascade, which connects bandit learning to list learning and may be of independent interest.
An Optimal Sauer Lemma Over $k$-ary Alphabets
Apr 14, 2026The Sauer-Shelah-Perles Lemma is a cornerstone of combinatorics and learning theory, bounding the size of a binary hypothesis class in terms of its Vapnik-Chervonenkis (VC) dimension. For classes of functions over a $k$-ary alphabet, namely the multiclass setting, the Natarajan dimension has long served as an analogue of VC dimension, yet the corresponding Sauer-type bounds are suboptimal for alphabet sizes $k>2$. In this work, we establish a sharp Sauer inequality for multiclass and list prediction. Our bound is expressed in terms of the Daniely--Shalev-Shwartz (DS) dimension, and more generally with its extension, the list-DS dimension -- the combinatorial parameters that characterize multiclass and list PAC learnability. Our bound is tight for every alphabet size $k$, list size $\ell$, and dimension value, replacing the exponential dependence on $\ell$ in the Natarajan-based bound by the optimal polynomial dependence, and improving the dependence on $k$ as well. Our proof uses the polynomial method. In contrast to the classical VC case, where several direct combinatorial proofs are known, we are not aware of any purely combinatorial proof in the DS setting. This motivates several directions for future research, which are discussed in the paper. As consequences, we obtain improved sample complexity upper bounds for list PAC learning and for uniform convergence of list predictors, sharpening the recent results of Charikar et al.~(STOC~2023), Hanneke et al.~(COLT~2024), and Brukhim et al.~(NeurIPS~2024).
Learning Dynamic Mechanisms in Unknown Environments: A Reinforcement Learning Approach
Feb 25, 2022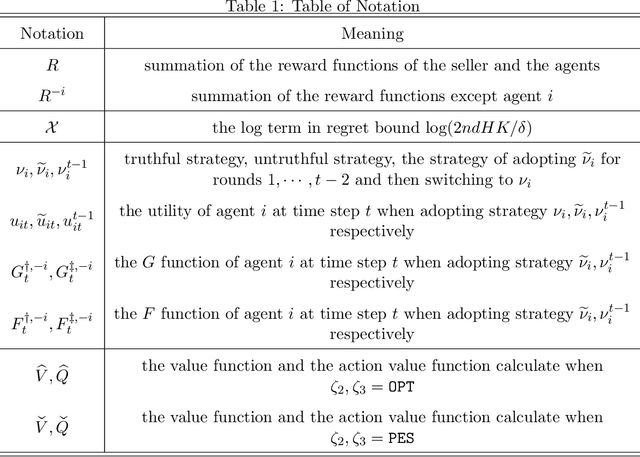
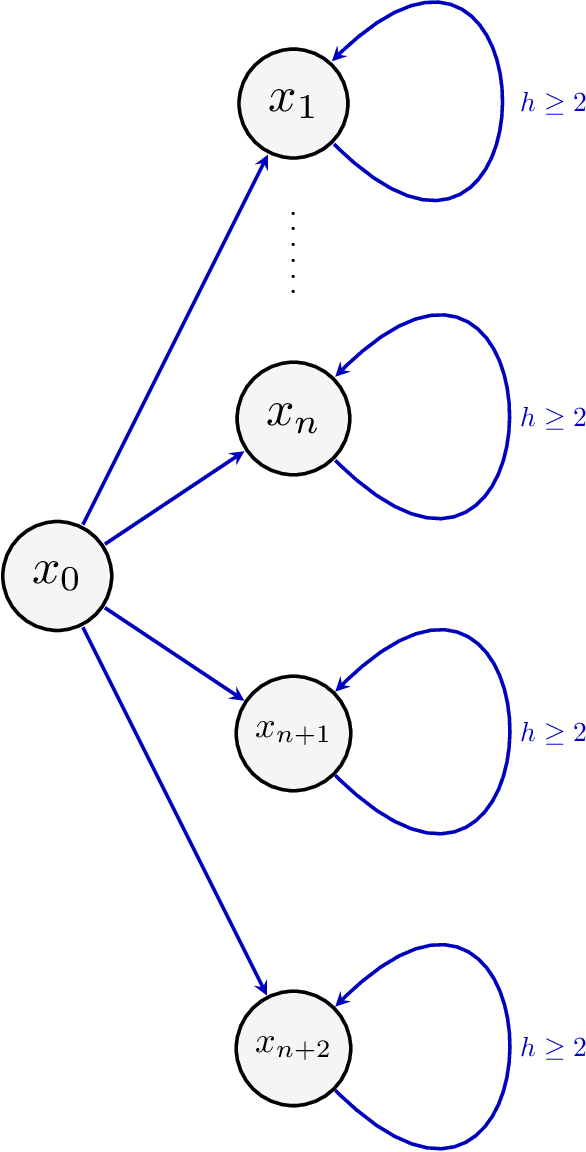
Dynamic mechanism design studies how mechanism designers should allocate resources among agents in a time-varying environment. We consider the problem where the agents interact with the mechanism designer according to an unknown Markov Decision Process (MDP), where agent rewards and the mechanism designer's state evolve according to an episodic MDP with unknown reward functions and transition kernels. We focus on the online setting with linear function approximation and attempt to recover the dynamic Vickrey-Clarke-Grove (VCG) mechanism over multiple rounds of interaction. A key contribution of our work is incorporating reward-free online Reinforcement Learning (RL) to aid exploration over a rich policy space to estimate prices in the dynamic VCG mechanism. We show that the regret of our proposed method is upper bounded by $\tilde{\mathcal{O}}(T^{2/3})$ and further devise a lower bound to show that our algorithm is efficient, incurring the same $\tilde{\mathcal{O}}(T^{2 / 3})$ regret as the lower bound, where $T$ is the total number of rounds. Our work establishes the regret guarantee for online RL in solving dynamic mechanism design problems without prior knowledge of the underlying model.