 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTCBiRRT: Rapid Motion Planning for Tightly Coupled Dual-arm Space Manipulator Using Task-space Random Expansion
May 26, 2026Planning the motion path for a tightly coupled dual-arm space manipulator under closed-chain constraints is a fundamental yet challenging problem in on-orbit assembly of large-scale space structures. The closed-chain constraints significantly reduce the feasible configuration space, making it difficult for existing planners to efficiently generate collision-free motions, especially in cluttered environments. To address this issue, this paper proposes a task-space constrained bidirectional rapidly-exploring random tree algorithm, termed TCBiRRT. Unlike conventional methods that operate in the high-dimensional configuration space, the proposed approach performs random sampling and node expansion directly in the task space defined by the manipulated object pose. A task-space node expansion strategy is developed to generate candidate object motions, which are then mapped to continuous joint paths using a path inverse kinematics algorithm. The method is further integrated with a bidirectional RRT framework and a regrasp mechanism to efficiently connect two random trees. Extensive simulations are conducted in representative on-orbit assembly scenarios with varying levels of environmental complexity. The results demonstrate that TCBiRRT achieves significantly higher success rates and orders-of-magnitude improvements in planning time compared to state-of-the-art planners. The proposed method provides an efficient and robust solution for motion planning of tightly coupled dual-arm space manipulators.
PoliteCamera: Respecting Strangers' Privacy in Mobile Photographing
May 24, 2020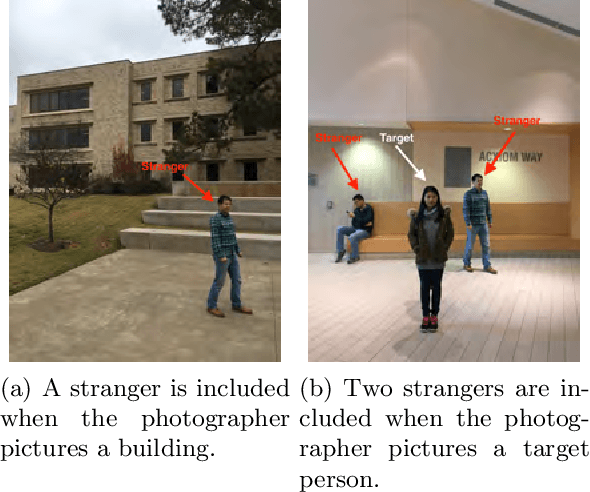
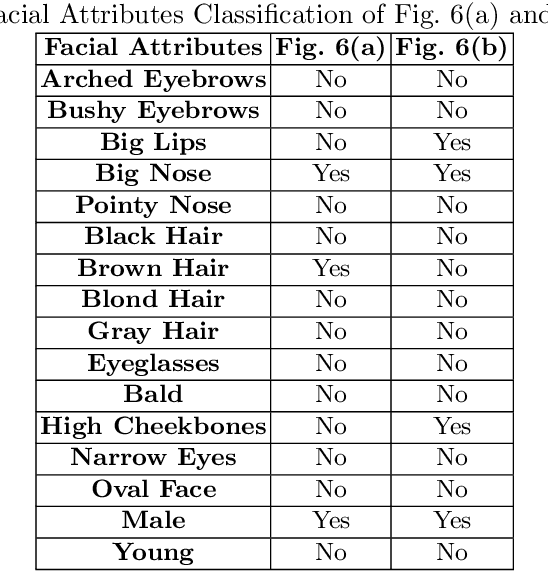
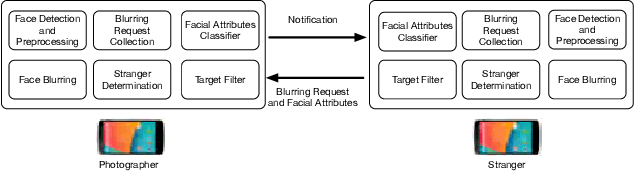
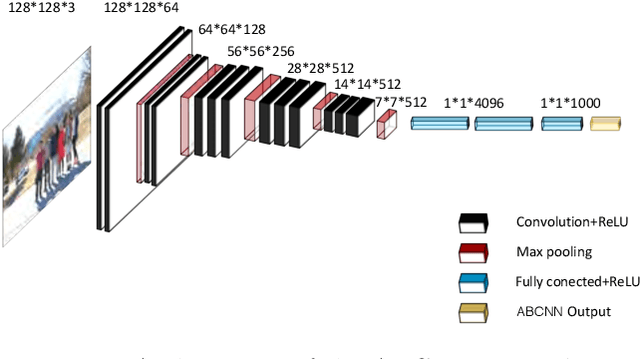
Camera is a standard on-board sensor of modern mobile phones. It makes photo taking popular due to its convenience and high resolution. However, when users take a photo of a scenery, a building or a target person, a stranger may also be unintentionally captured in the photo. Such photos expose the location and activity of strangers, and hence may breach their privacy. In this paper, we propose a cooperative mobile photographing scheme called PoliteCamera to protect strangers' privacy. Through the cooperation between a photographer and a stranger, the stranger's face in a photo can be automatically blurred upon his request when the photo is taken. Since multiple strangers nearby the photographer might send out blurring requests but not all of them are in the photo, an adapted balanced convolutional neural network (ABCNN) is proposed to determine whether the requesting stranger is in the photo based on facial attributes. Evaluations demonstrate that the ABCNN can accurately predict facial attributes and PoliteCamera can provide accurate privacy protection for strangers.