 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing the Limits of Deep CNNs for Pedestrian Detection
Jun 06, 2016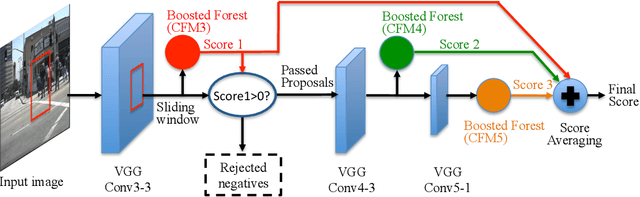
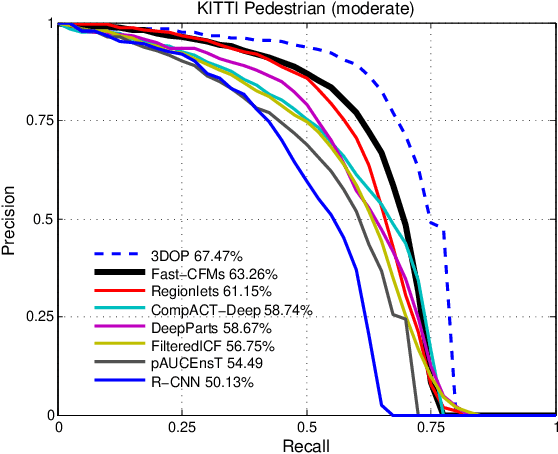
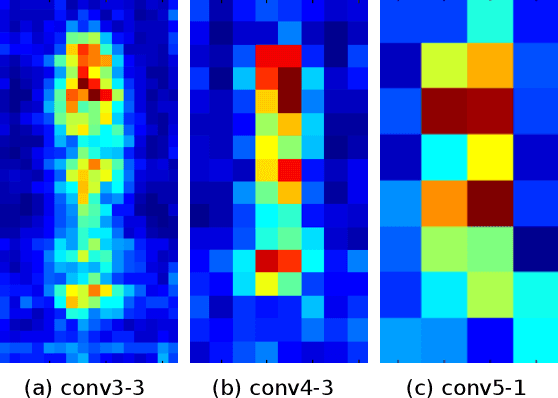
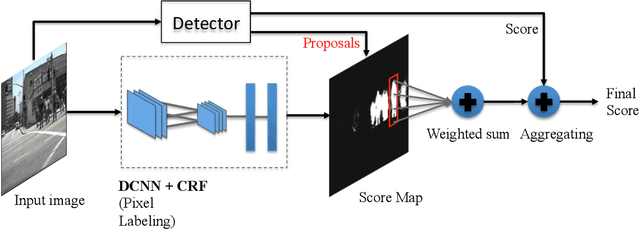
Compared to other applications in computer vision, convolutional neural networks have under-performed on pedestrian detection. A breakthrough was made very recently by using sophisticated deep CNN models, with a number of hand-crafted features, or explicit occlusion handling mechanism. In this work, we show that by re-using the convolutional feature maps (CFMs) of a deep convolutional neural network (DCNN) model as image features to train an ensemble of boosted decision models, we are able to achieve the best reported accuracy without using specially designed learning algorithms. We empirically identify and disclose important implementation details. We also show that pixel labelling may be simply combined with a detector to boost the detection performance. By adding complementary hand-crafted features such as optical flow, the DCNN based detector can be further improved. We set a new record on the Caltech pedestrian dataset, lowering the log-average miss rate from $11.7\%$ to $8.9\%$, a relative improvement of $24\%$. We also achieve a comparable result to the state-of-the-art approaches on the KITTI dataset.
Fast detection of multiple objects in traffic scenes with a common detection framework
Oct 12, 2015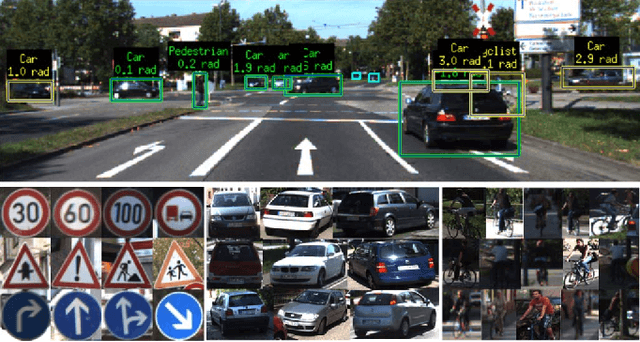
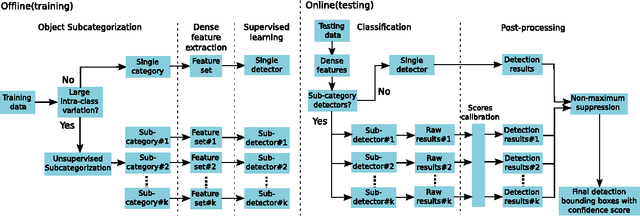
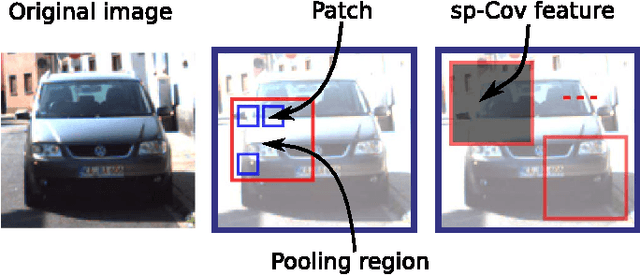
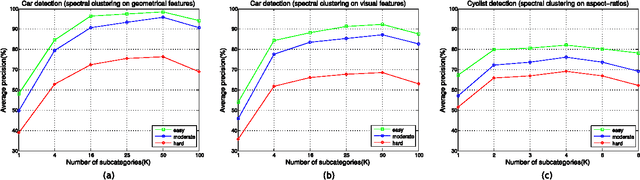
Traffic scene perception (TSP) aims to real-time extract accurate on-road environment information, which in- volves three phases: detection of objects of interest, recognition of detected objects, and tracking of objects in motion. Since recognition and tracking often rely on the results from detection, the ability to detect objects of interest effectively plays a crucial role in TSP. In this paper, we focus on three important classes of objects: traffic signs, cars, and cyclists. We propose to detect all the three important objects in a single learning based detection framework. The proposed framework consists of a dense feature extractor and detectors of three important classes. Once the dense features have been extracted, these features are shared with all detectors. The advantage of using one common framework is that the detection speed is much faster, since all dense features need only to be evaluated once in the testing phase. In contrast, most previous works have designed specific detectors using different features for each of these objects. To enhance the feature robustness to noises and image deformations, we introduce spatially pooled features as a part of aggregated channel features. In order to further improve the generalization performance, we propose an object subcategorization method as a means of capturing intra-class variation of objects. We experimentally demonstrate the effectiveness and efficiency of the proposed framework in three detection applications: traffic sign detection, car detection, and cyclist detection. The proposed framework achieves the competitive performance with state-of- the-art approaches on several benchmark datasets.