 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Chain Manipulation of Large Objects by Multi-Arm Robotic Systems
Jun 21, 2017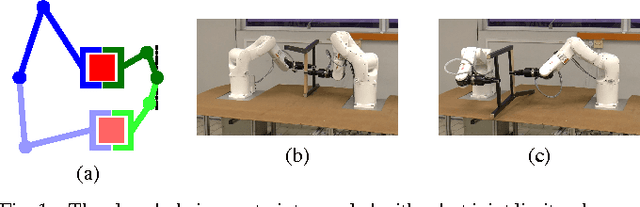
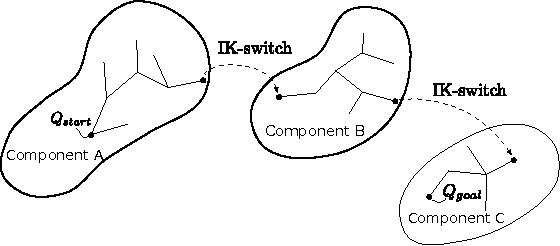
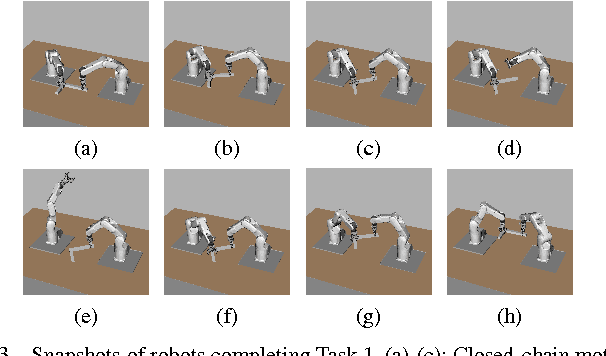
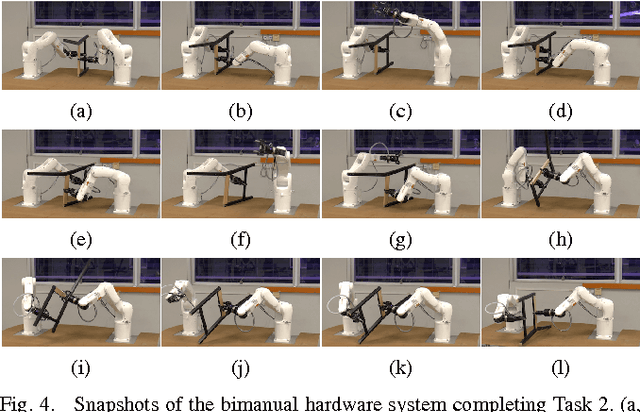
Closed kinematic chains are created whenever multiple robot arms concurrently manipulate a single object. The closed-chain constraint, when coupled with robot joint limits, dramatically changes the connectivity of the configuration space. We propose a regrasping move, termed "IK-switch", which allows efficiently bridging components of the configuration space that are otherwise mutually disconnected. This move, combined with several other developments, such as a method to stabilize the manipulated object using the environment, a new tree structure, and a compliant control scheme, enables us to address complex closed-chain manipulation tasks, such as flipping a chair frame, which is otherwise impossible to realize using existing multi-arm planning methods.
A Certified-Complete Bimanual Manipulation Planner
May 07, 2017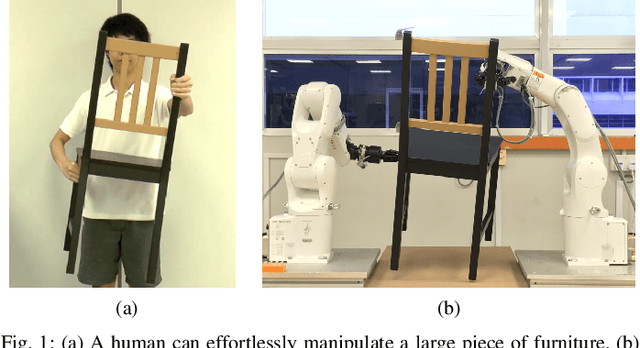

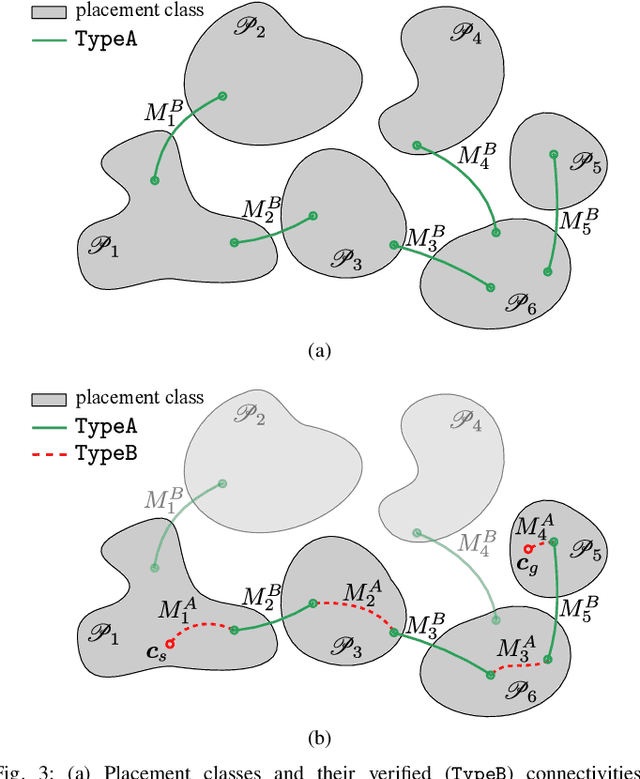
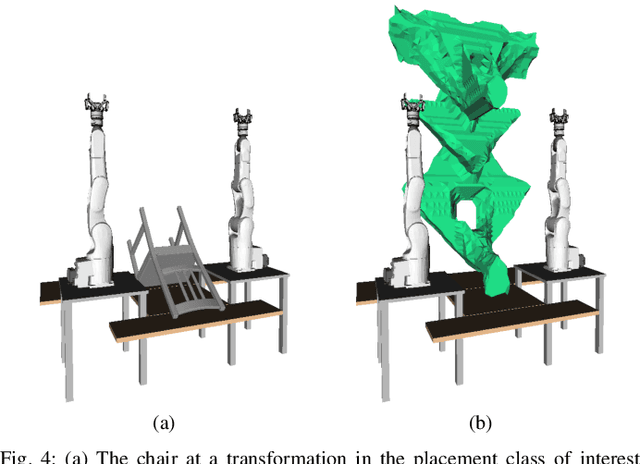
Planning motions for two robot arms to move an object collaboratively is a difficult problem, mainly because of the closed-chain constraint, which arises whenever two robot hands simultaneously grasp a single rigid object. In this paper, we propose a manipulation planning algorithm to bring an object from an initial stable placement (position and orientation of the object on the support surface) towards a goal stable placement. The key specificity of our algorithm is that it is certified-complete: for a given object and a given environment, we provide a certificate that the algorithm will find a solution to any bimanual manipulation query in that environment whenever one exists. Moreover, the certificate is constructive: at run-time, it can be used to quickly find a solution to a given query. The algorithm is tested in software and hardware on a number of large pieces of furniture.
Admissible Velocity Propagation : Beyond Quasi-Static Path Planning for High-Dimensional Robots
Sep 30, 2016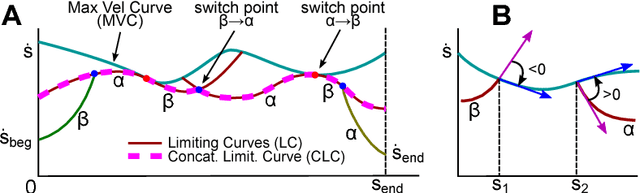
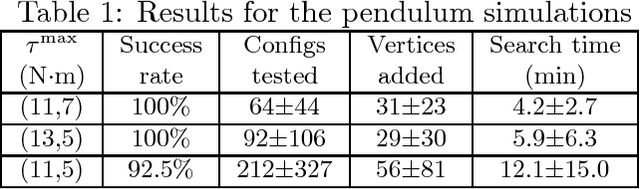
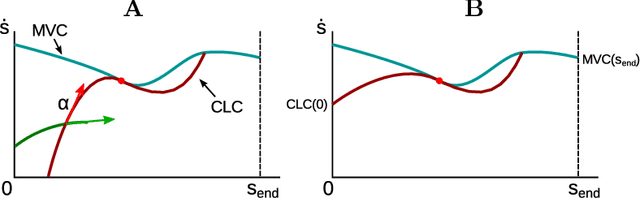
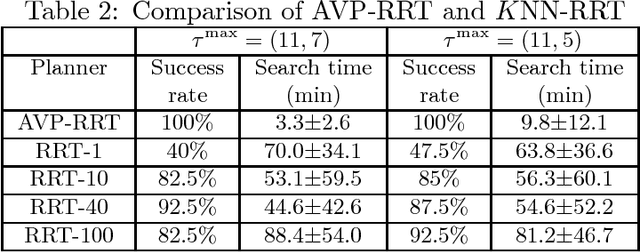
Path-velocity decomposition is an intuitive yet powerful approach to address the complexity of kinodynamic motion planning. The difficult trajectory planning problem is solved in two separate, simpler, steps: first, find a path in the configuration space that satisfies the geometric constraints (path planning), and second, find a time-parameterization of that path satisfying the kinodynamic constraints. A fundamental requirement is that the path found in the first step should be time-parameterizable. Most existing works fulfill this requirement by enforcing quasi-static constraints in the path planning step, resulting in an important loss in completeness. We propose a method that enables path-velocity decomposition to discover truly dynamic motions, i.e. motions that are not quasi-statically executable. At the heart of the proposed method is a new algorithm -- Admissible Velocity Propagation -- which, given a path and an interval of reachable velocities at the beginning of that path, computes exactly and efficiently the interval of all the velocities the system can reach after traversing the path while respecting the system kinodynamic constraints. Combining this algorithm with usual sampling-based planners then gives rise to a family of new trajectory planners that can appropriately handle kinodynamic constraints while retaining the advantages associated with path-velocity decomposition. We demonstrate the efficiency of the proposed method on some difficult kinodynamic planning problems, where, in particular, quasi-static methods are guaranteed to fail.
A Single-Query Manipulation Planner
Dec 17, 2015
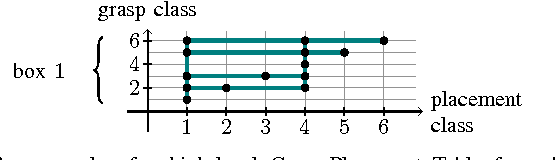
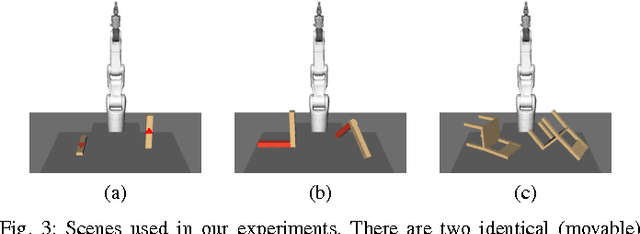
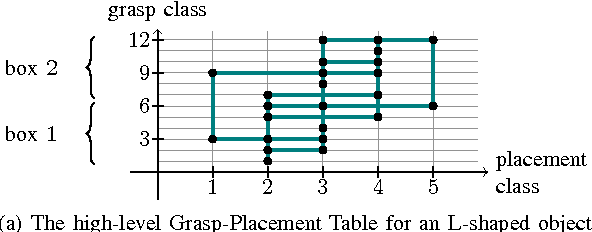
In manipulation tasks, a robot interacts with movable object(s). The configuration space in manipulation planning is thus the Cartesian product of the configuration space of the robot with those of the movable objects. It is the complex structure of such a "Composite Configuration Space" that makes manipulation planning particularly challenging. Previous works approximate the connectivity of the Composite Configuration Space by means of discretization or by creating random roadmaps. Such approaches involve an extensive pre-processing phase, which furthermore has to be re-done each time the environment changes. In this paper, we propose a high-level Grasp-Placement Table similar to that proposed by Tournassoud et al. (1987), but which does not require any discretization or heavy pre-processing. The table captures the potential connectivity of the Composite Configuration Space while being specific only to the movable object: in particular, it does not require to be re-computed when the environment changes. During the query phase, the table is used to guide a tree-based planner that explores the space systematically. Our simulations and experiments show that the proposed method enables improvements in both running time and trajectory quality as compared to existing approaches.