 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReALM: Reference Resolution As Language Modeling
Mar 29, 2024



Reference resolution is an important problem, one that is essential to understand and successfully handle context of different kinds. This context includes both previous turns and context that pertains to non-conversational entities, such as entities on the user's screen or those running in the background. While LLMs have been shown to be extremely powerful for a variety of tasks, their use in reference resolution, particularly for non-conversational entities, remains underutilized. This paper demonstrates how LLMs can be used to create an extremely effective system to resolve references of various types, by showing how reference resolution can be converted into a language modeling problem, despite involving forms of entities like those on screen that are not traditionally conducive to being reduced to a text-only modality. We demonstrate large improvements over an existing system with similar functionality across different types of references, with our smallest model obtaining absolute gains of over 5% for on-screen references. We also benchmark against GPT-3.5 and GPT-4, with our smallest model achieving performance comparable to that of GPT-4, and our larger models substantially outperforming it.
Convex Optimization in Legged Robots
Jun 30, 2023



Convex optimization is crucial in controlling legged robots, where stability and optimal control are vital. Many control problems can be formulated as convex optimization problems, with a convex cost function and constraints capturing system dynamics. Our review focuses on active balancing problems and presents a general framework for formulating them as second-order cone programming (SOCP) for robustness and efficiency with existing interior point algorithms. We then discuss some prior work around the Zero Moment Point stability criterion, Linear Quadratic Regulator Control, and then the feedback model predictive control (MPC) approach to improve prediction accuracy and reduce computational costs. Finally, these techniques are applied to stabilize the robot for jumping and landing tasks. Further research in convex optimization of legged robots can have a significant societal impact. It can lead to improved gait planning and active balancing which enhances their ability to navigate complex environments, assist in search and rescue operations and perform tasks in hazardous environments. These advancements have the potential to revolutionize industries and help humans in daily life.
Terrain Adaptive Gait Transitioning for a Quadruped Robot using Model Predictive Control
Jun 07, 2021
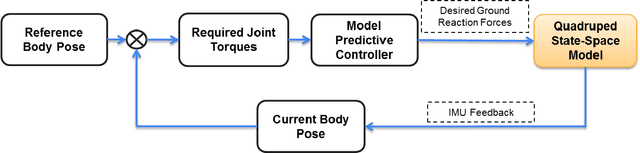
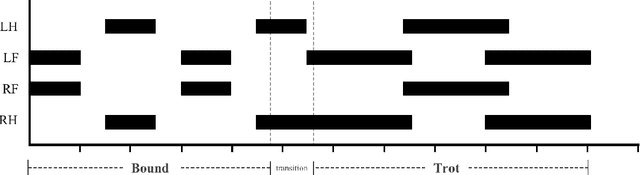
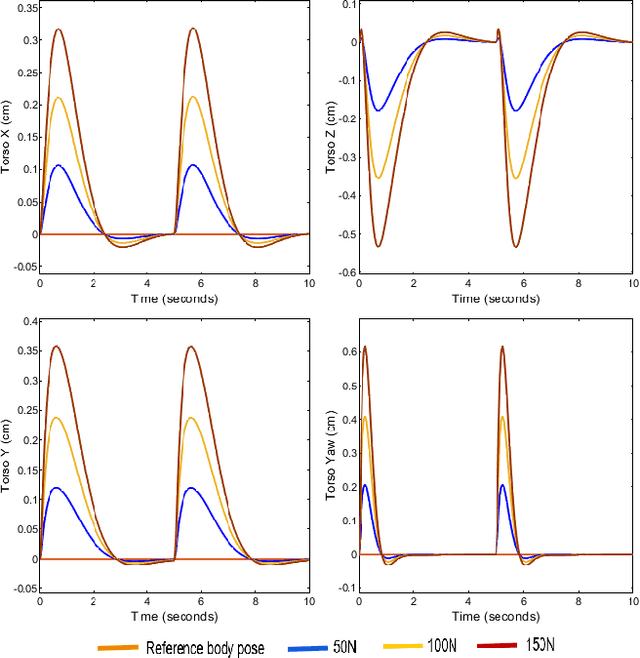
Legged robots can traverse challenging terrain, use perception to plan their safe foothold positions, and navigate the environment. Such unique mobility capabilities make these platforms a perfect candidate for scenarios such as search and rescue, inspection, and exploration tasks. While traversing through such terrains, the robot's instability is a significant concern. Many times the robot needs to switch gaits depending on its environment. Due to the complex dynamics of quadruped robots, classical PID control fails to provide high stability. Thus, there is a need for advanced control methods like the Model Predictive Control (MPC) which uses the system model and the nature of the terrain in order to predict the stable body pose of the robot. The controller also provides correction to any external disturbances that result in a change in the desired behavior of the robot. The MPC controller is designed in MATLAB, for full body torque control. The controller performance was verified on Boston Dynamics Spot in Webots simulator. The robot is able to provide correction for external perturbations up to 150 N and also resist falls till 80 cm.
Modeling and Simulation of a Point to Point Spherical Articulated Manipulator using Optimal Control
Oct 26, 2020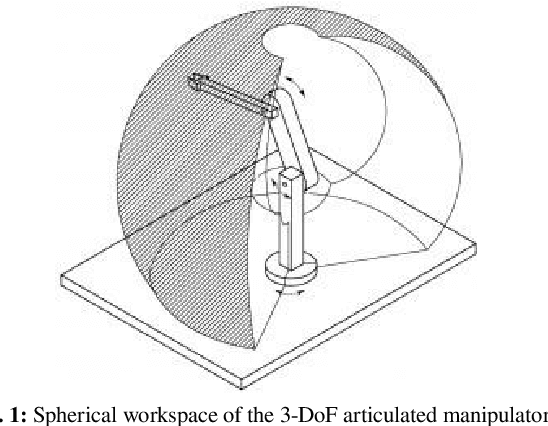
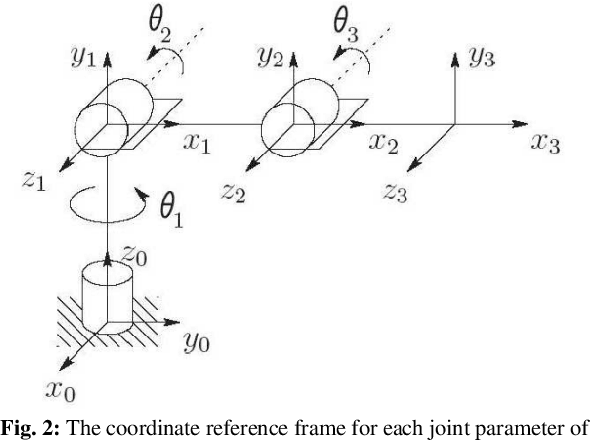
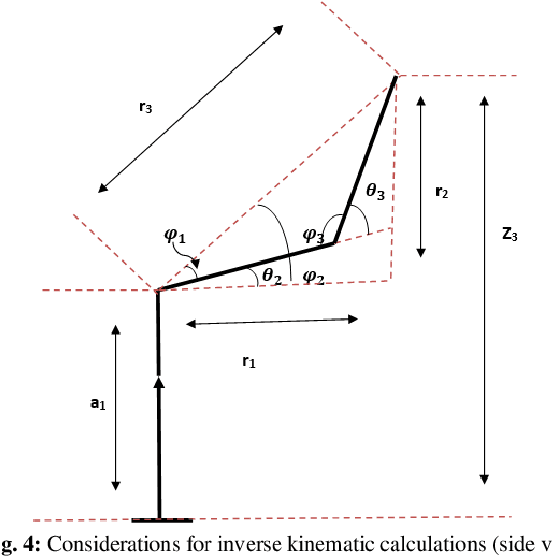
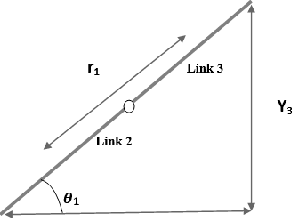
This paper aims to design an optimal stability controller for a point to point trajectory tracking 3 degree of freedom articulated manipulator. The DH convention is used to obtain the forward and inverse kinematics of the manipulator. The manipulator dynamics are formulated using the Lagrange Euler method to obtain a nonlinear system. The complicated nonlinear equations obtained are then linearized in order to implement the optimal LQR. The simulations are performed in MATLAB and Simulink and the optimal controllers performance is tested for various conditions and the results are presented. The results obtained prove the superiority of LQR over conventional PID control.
A Convolutional Neural Network Approach Towards Self-Driving Cars
Sep 09, 2019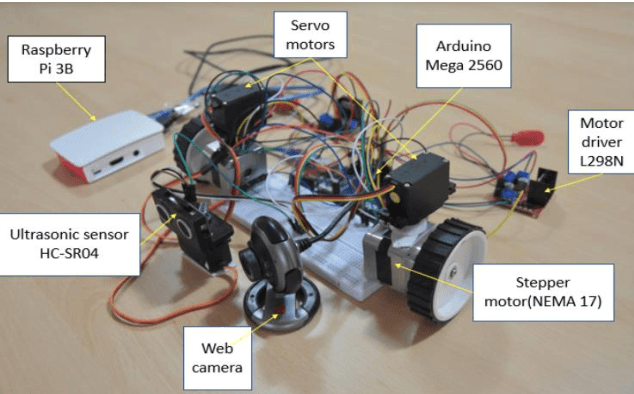
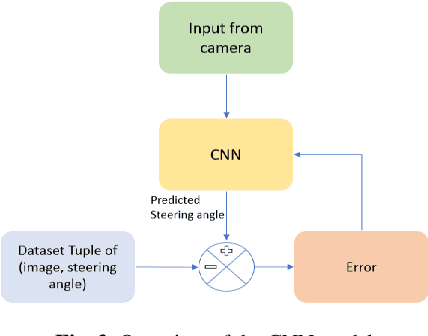
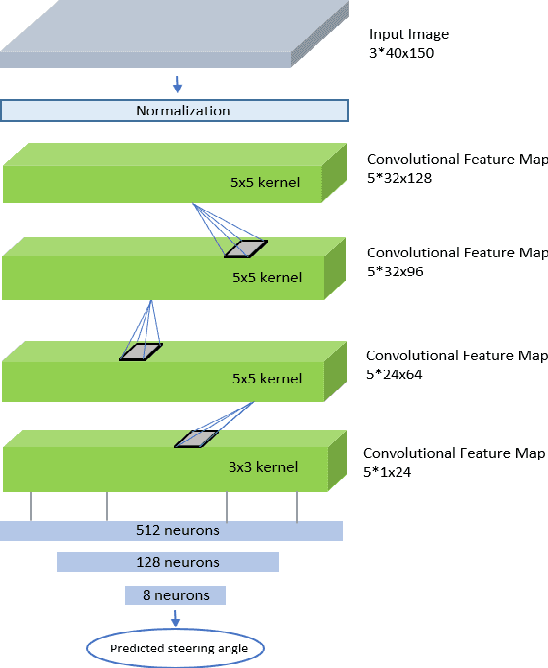
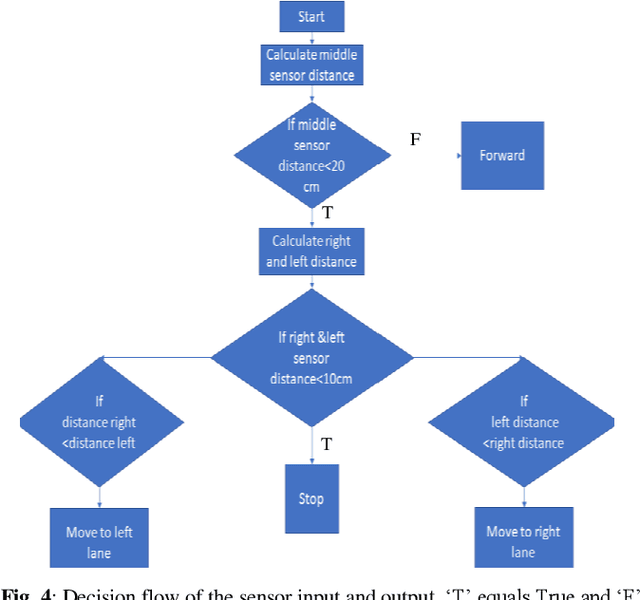
A convolutional neural network (CNN) approach is used to implement a level 2 autonomous vehicle by mapping pixels from the camera input to the steering commands. The network automatically learns the maximum variable features from the camera input, hence requires minimal human intervention. Given realistic frames as input, the driving policy trained on the dataset by NVIDIA and Udacity can adapt to real-world driving in a controlled environment. The CNN is tested on the CARLA open-source driving simulator. Details of a beta-testing platform are also presented, which consists of an ultrasonic sensor for obstacle detection and an RGBD camera for real-time position monitoring at 10Hz. Arduino Mega and Raspberry Pi are used for motor control and processing respectively to output the steering angle, which is converted to angular velocity for steering.