 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgemimic-one: a Scalable Model Recipe for General Purpose Robot Dexterity
Jun 13, 2025



We present a diffusion-based model recipe for real-world control of a highly dexterous humanoid robotic hand, designed for sample-efficient learning and smooth fine-motor action inference. Our system features a newly designed 16-DoF tendon-driven hand, equipped with wide angle wrist cameras and mounted on a Franka Emika Panda arm. We develop a versatile teleoperation pipeline and data collection protocol using both glove-based and VR interfaces, enabling high-quality data collection across diverse tasks such as pick and place, item sorting and assembly insertion. Leveraging high-frequency generative control, we train end-to-end policies from raw sensory inputs, enabling smooth, self-correcting motions in complex manipulation scenarios. Real-world evaluations demonstrate up to 93.3% out of distribution success rates, with up to a +33.3% performance boost due to emergent self-correcting behaviors, while also revealing scaling trends in policy performance. Our results advance the state-of-the-art in dexterous robotic manipulation through a fully integrated, practical approach to hardware, learning, and real-world deployment.
Prismatic Soft Actuator Augments the Workspace of Soft Continuum Robots
Apr 15, 2022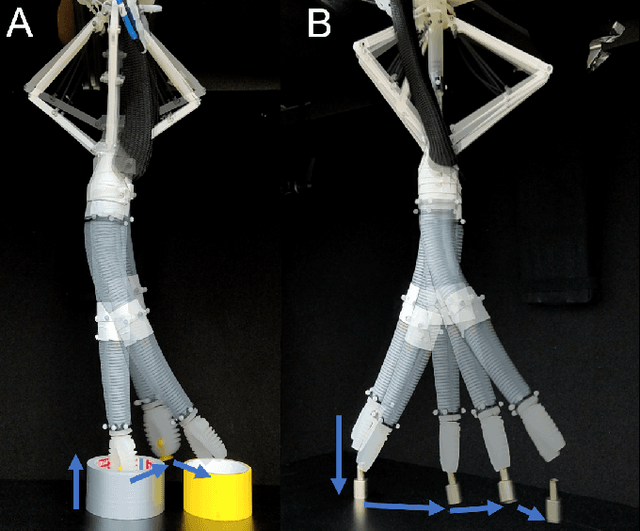
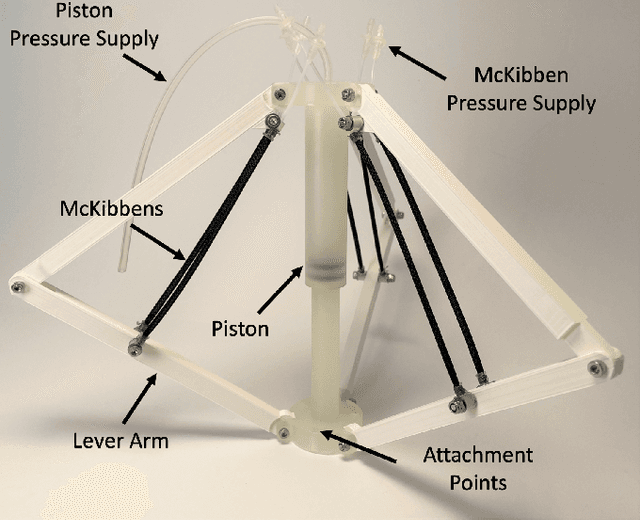
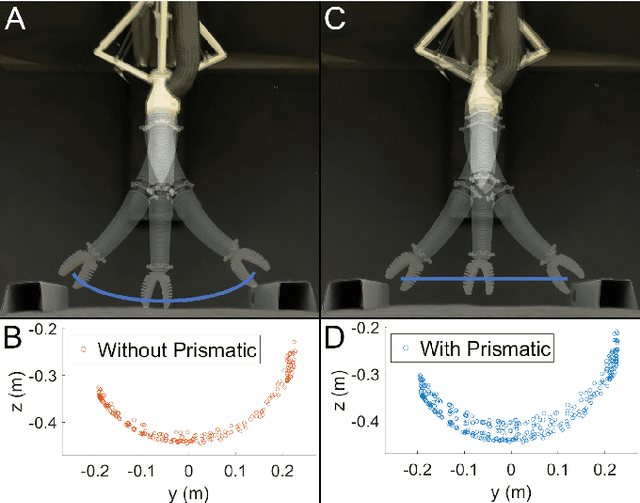
Soft robots are promising for manipulation tasks thanks to their compliance, safety, and high degree of freedom. However, the commonly used bidirectional continuum segment design means soft robotic manipulators only function in a limited hemispherical workspace. This work increases a soft robotic arm's workspace by designing, fabricating, and controlling an additional soft prismatic actuator at the base of the soft arm. This actuator consists of pneumatic artificial muscles and a piston, making the actuator back-driveable. We increase the task space volume by 116\%, and we are now able to perform manipulation tasks that were previously impossible for soft robots, such as picking and placing objects at different positions on a surface and grabbing an object out of a container. By combining a soft robotic arm with a prismatic joint, we greatly increase the usability of soft robots for object manipulation. This work promotes the use of integrated and modular soft robotic systems for practical manipulation applications in human-centered environments.