 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Pre-training Across Domains for Few-Shot Surgical Skill Assessment
Sep 11, 2025



Automated surgical skill assessment (SSA) is a central task in surgical computer vision. Developing robust SSA models is challenging due to the scarcity of skill annotations, which are time-consuming to produce and require expert consensus. Few-shot learning (FSL) offers a scalable alternative enabling model development with minimal supervision, though its success critically depends on effective pre-training. While widely studied for several surgical downstream tasks, pre-training has remained largely unexplored in SSA. In this work, we formulate SSA as a few-shot task and investigate how self-supervised pre-training strategies affect downstream few-shot SSA performance. We annotate a publicly available robotic surgery dataset with Objective Structured Assessment of Technical Skill (OSATS) scores, and evaluate various pre-training sources across three few-shot settings. We quantify domain similarity and analyze how domain gap and the inclusion of procedure-specific data into pre-training influence transferability. Our results show that small but domain-relevant datasets can outperform large scale, less aligned ones, achieving accuracies of 60.16%, 66.03%, and 73.65% in the 1-, 2-, and 5-shot settings, respectively. Moreover, incorporating procedure-specific data into pre-training with a domain-relevant external dataset significantly boosts downstream performance, with an average gain of +1.22% in accuracy and +2.28% in F1-score; however, applying the same strategy with less similar but large-scale sources can instead lead to performance degradation. Code and models are available at https://github.com/anastadimi/ssa-fsl.
Synthetic and Real Inputs for Tool Segmentation in Robotic Surgery
Jul 26, 2020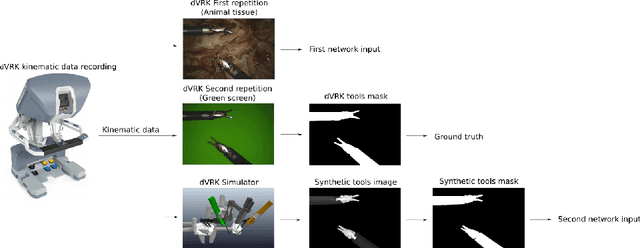
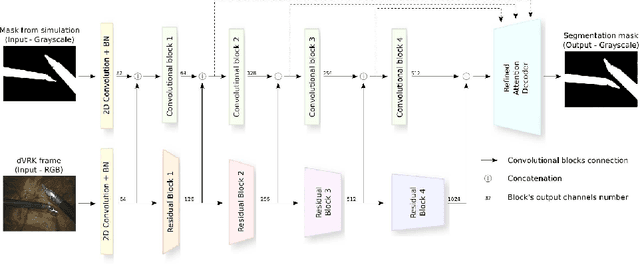
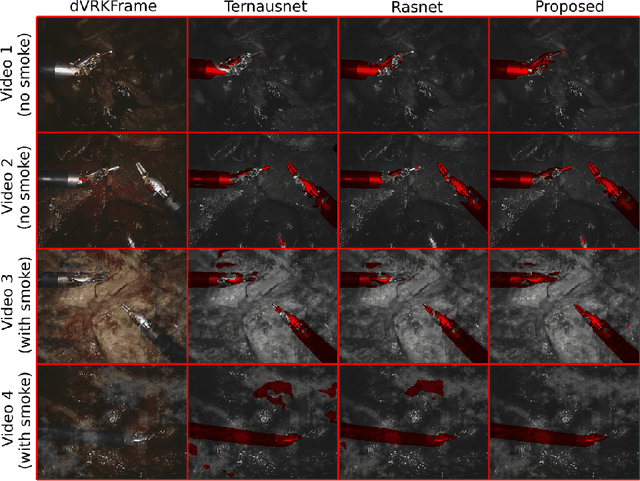
Semantic tool segmentation in surgical videos is important for surgical scene understanding and computer-assisted interventions as well as for the development of robotic automation. The problem is challenging because different illumination conditions, bleeding, smoke and occlusions can reduce algorithm robustness. At present labelled data for training deep learning models is still lacking for semantic surgical instrument segmentation and in this paper we show that it may be possible to use robot kinematic data coupled with laparoscopic images to alleviate the labelling problem. We propose a new deep learning based model for parallel processing of both laparoscopic and simulation images for robust segmentation of surgical tools. Due to the lack of laparoscopic frames annotated with both segmentation ground truth and kinematic information a new custom dataset was generated using the da Vinci Research Kit (dVRK) and is made available.