 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaps for Autonomous Driving: Full-process Survey and Frontiers
Sep 16, 2025Maps have always been an essential component of autonomous driving. With the advancement of autonomous driving technology, both the representation and production process of maps have evolved substantially. The article categorizes the evolution of maps into three stages: High-Definition (HD) maps, Lightweight (Lite) maps, and Implicit maps. For each stage, we provide a comprehensive review of the map production workflow, with highlighting technical challenges involved and summarizing relevant solutions proposed by the academic community. Furthermore, we discuss cutting-edge research advances in map representations and explore how these innovations can be integrated into end-to-end autonomous driving frameworks.
PolyU-BPCoMa: A Dataset and Benchmark Towards Mobile Colorized Mapping Using a Backpack Multisensorial System
Jun 15, 2022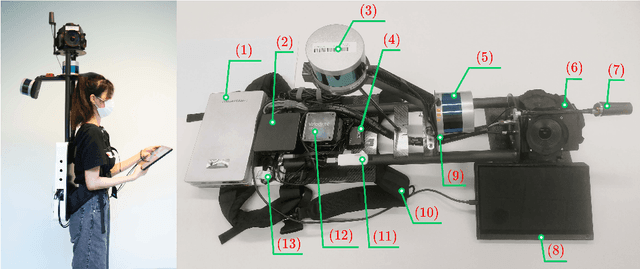
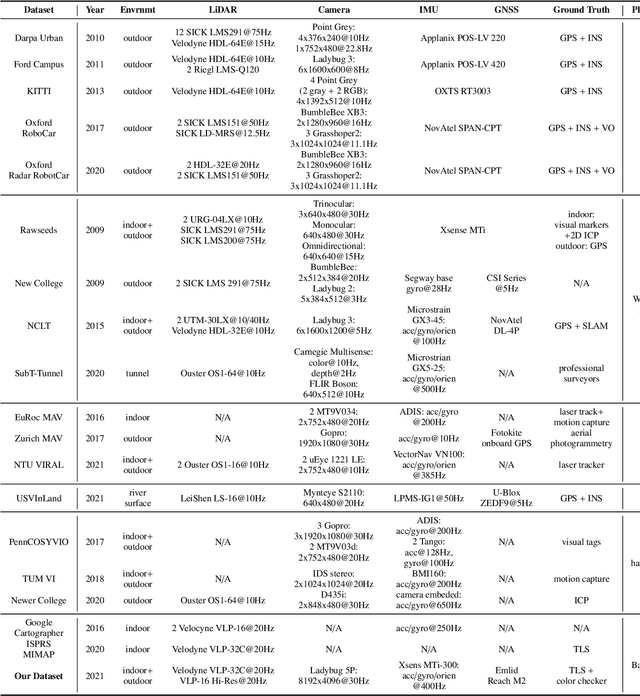
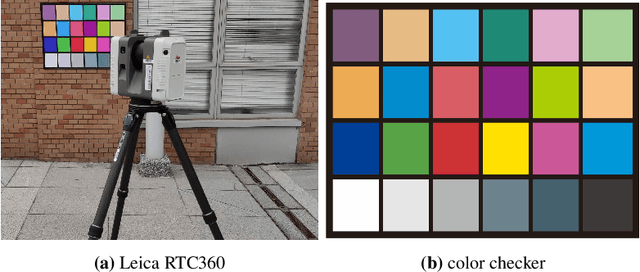

Constructing colorized point clouds from mobile laser scanning and images is a fundamental work in surveying and mapping. It is also an essential prerequisite for building digital twins for smart cities. However, existing public datasets are either in relatively small scales or lack accurate geometrical and color ground truth. This paper documents a multisensorial dataset named PolyU-BPCoMA which is distinctively positioned towards mobile colorized mapping. The dataset incorporates resources of 3D LiDAR, spherical imaging, GNSS and IMU on a backpack platform. Color checker boards are pasted in each surveyed area as targets and ground truth data are collected by an advanced terrestrial laser scanner (TLS). 3D geometrical and color information can be recovered in the colorized point clouds produced by the backpack system and the TLS, respectively. Accordingly, we provide an opportunity to benchmark the mapping and colorization accuracy simultaneously for a mobile multisensorial system. The dataset is approximately 800 GB in size covering both indoor and outdoor environments. The dataset and development kits are available at https://github.com/chenpengxin/PolyU-BPCoMa.git.