 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Shape Estimation for 3D Deformable Object Manipulation
Sep 26, 2018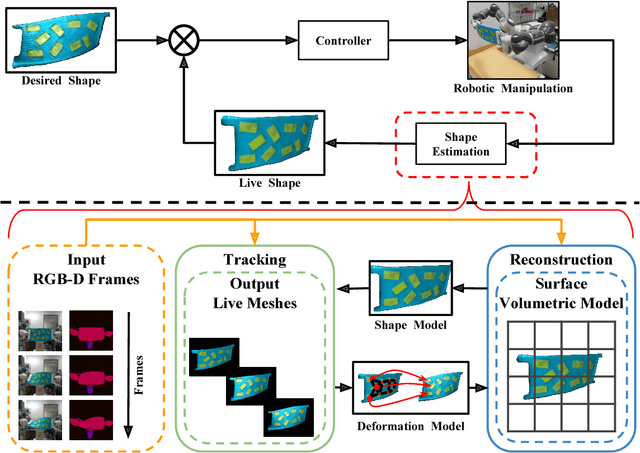
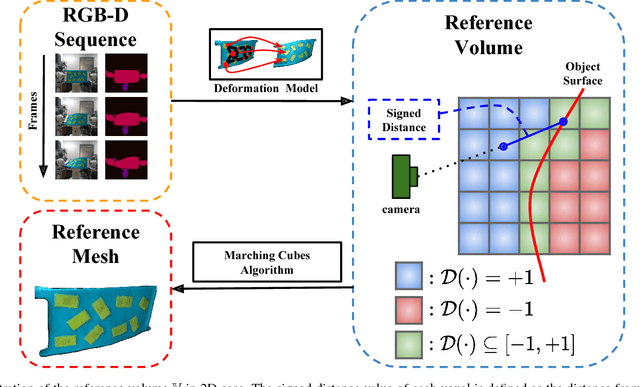
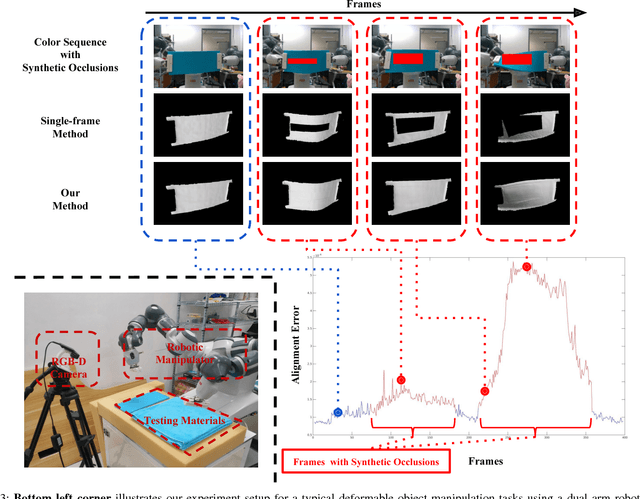
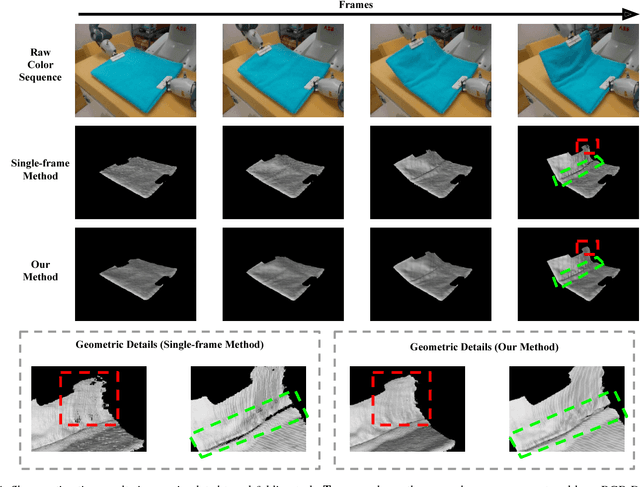
Existing shape estimation methods for deformable object manipulation suffer from the drawbacks of being off-line, model dependent, noise-sensitive or occlusion-sensitive, and thus are not appropriate for manipulation tasks requiring high precision. In this paper, we present a real-time shape estimation approach for autonomous robotic manipulation of 3D deformable objects. Our method fulfills all the requirements necessary for the high-quality deformable object manipulation in terms of being real-time, model-free and robust to noise and occlusion. These advantages are accomplished using a joint tracking and reconstruction framework, in which we track the object deformation by aligning a reference shape model with the stream input from the RGB-D camera, and simultaneously upgrade the reference shape model according to the newly captured RGB-D data. We have evaluated the quality and robustness of our real-time shape estimation pipeline on a set of deformable manipulation tasks implemented on physical robots. Videos are available at https://lifeisfantastic.github.io/DeformShapeEst/
3D Deformable Object Manipulation using Fast Online Gaussian Process Regression
Oct 05, 2017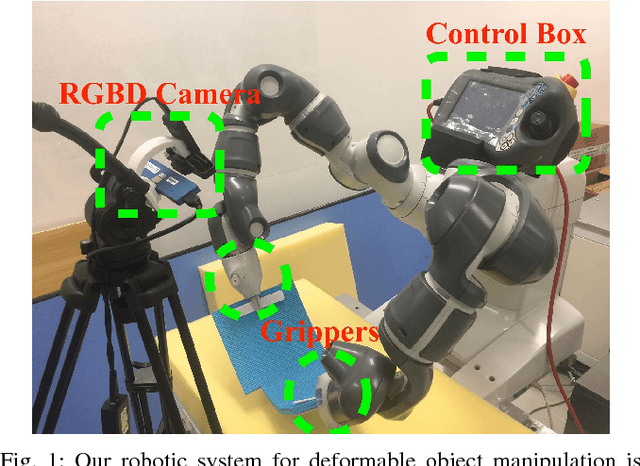
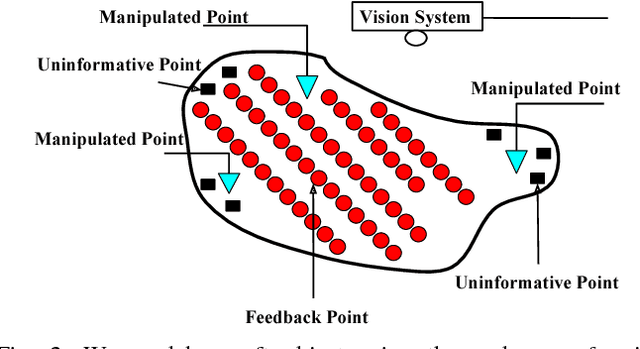
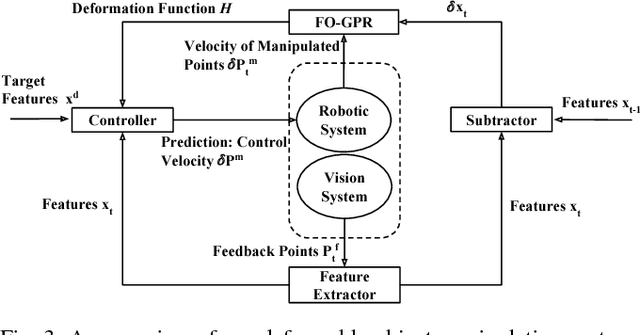
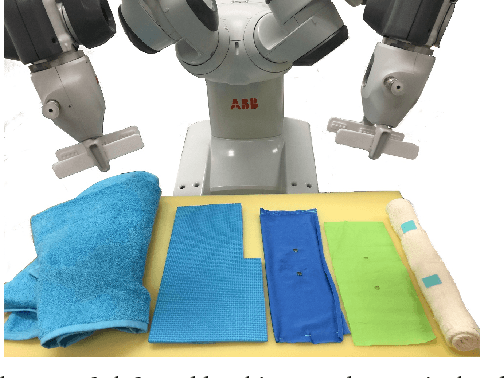
In this paper, we present a general approach to automatically visual-servo control the position and shape of a deformable object whose deformation parameters are unknown. The servo-control is achieved by online learning a model mapping between the robotic end-effector's movement and the object's deformation measurement. The model is learned using the Gaussian Process Regression (GPR) to deal with its highly nonlinear property, and once learned, the model is used for predicting the required control at each time step. To overcome GPR's high computational cost while dealing with long manipulation sequences, we implement a fast online GPR by selectively removing uninformative observation data from the regression process. We validate the performance of our controller on a set of deformable object manipulation tasks and demonstrate that our method can achieve effective and accurate servo-control for general deformable objects with a wide variety of goal settings. Experiment videos are available at https://sites.google.com/view/mso-fogpr