 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Place Recognition with Deep Embedding Learning over Radar Videos
Jun 12, 2021
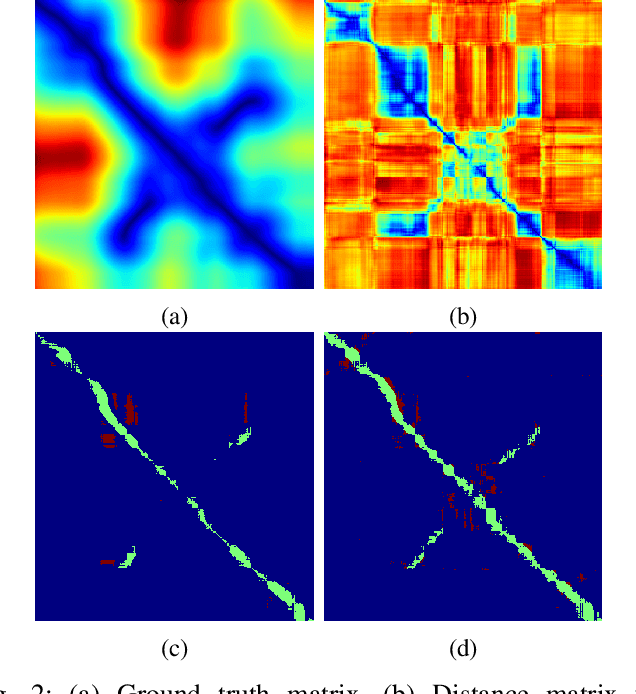
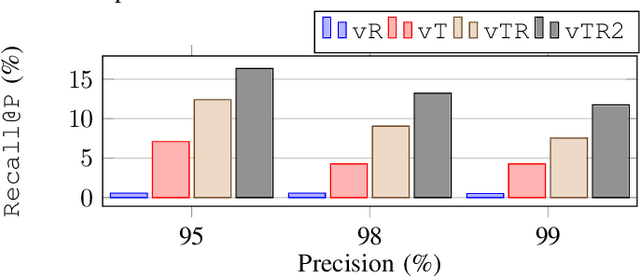
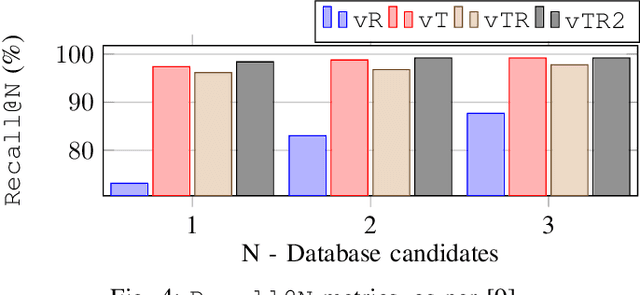
We learn, in an unsupervised way, an embedding from sequences of radar images that is suitable for solving place recognition problem using complex radar data. We experiment on 280 km of data and show performance exceeding state-of-the-art supervised approaches, localising correctly 98.38% of the time when using just the nearest database candidate.
Fool Me Once: Robust Selective Segmentation via Out-of-Distribution Detection with Contrastive Learning
Mar 01, 2021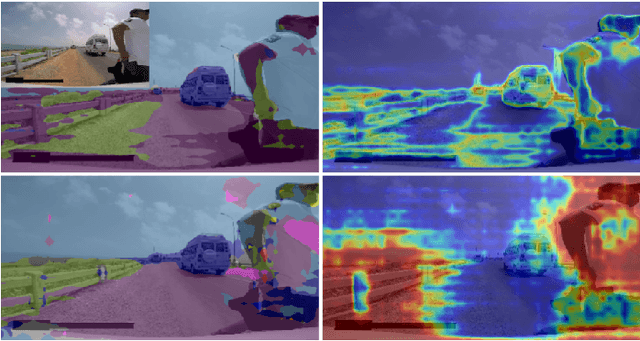
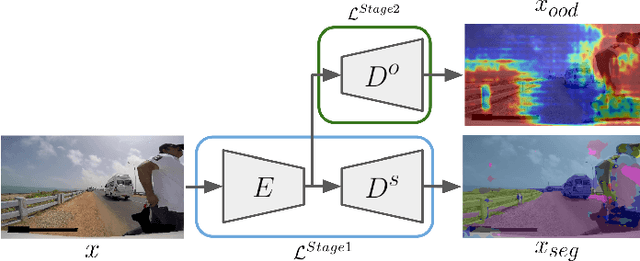

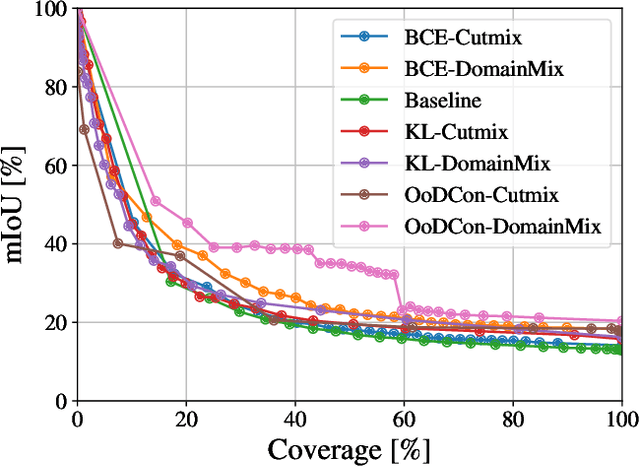
In this work, we train a network to simultaneously perform segmentation and pixel-wise Out-of-Distribution (OoD) detection, such that the segmentation of unknown regions of scenes can be rejected. This is made possible by leveraging an OoD dataset with a novel contrastive objective and data augmentation scheme. By combining data including unknown classes in the training data, a more robust feature representation can be learned with known classes represented distinctly from those unknown. When presented with unknown classes or conditions, many current approaches for segmentation frequently exhibit high confidence in their inaccurate segmentations and cannot be trusted in many operational environments. We validate our system on a real-world dataset of unusual driving scenes, and show that by selectively segmenting scenes based on what is predicted as OoD, we can increase the segmentation accuracy by an IoU of 0.2 with respect to alternative techniques.
Self-Supervised Localisation between Range Sensors and Overhead Imagery
Jun 03, 2020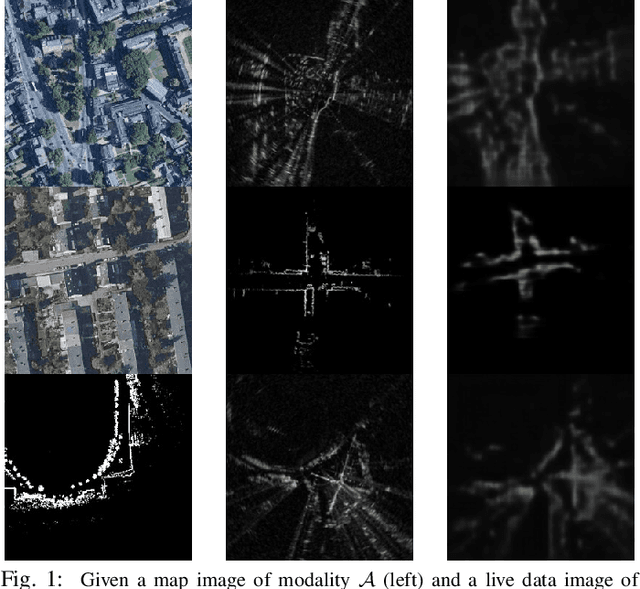
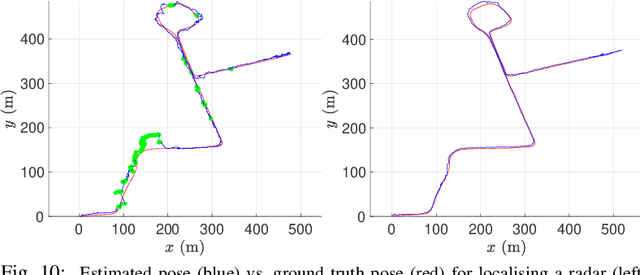
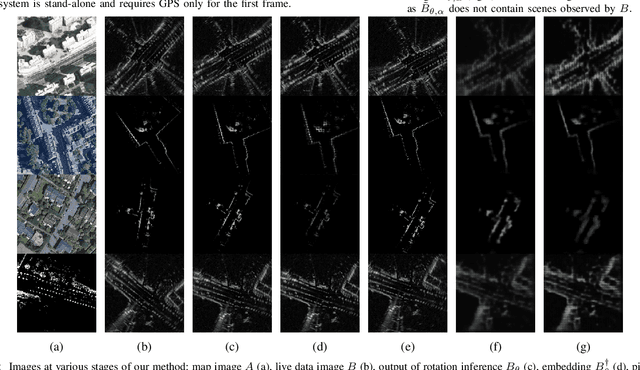
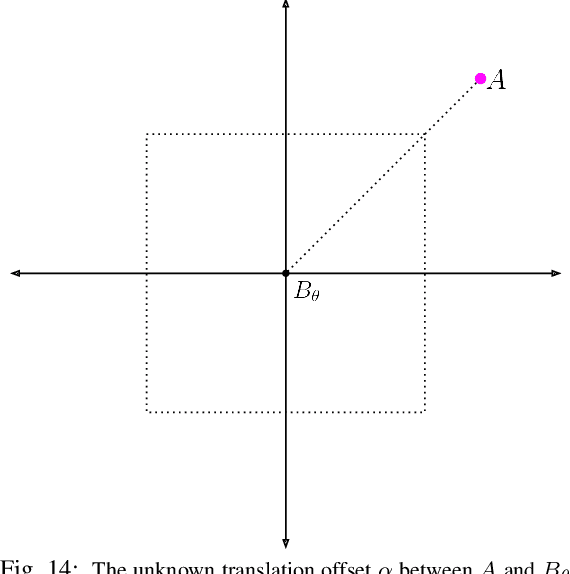
Publicly available satellite imagery can be an ubiquitous, cheap, and powerful tool for vehicle localisation when a prior sensor map is unavailable. However, satellite images are not directly comparable to data from ground range sensors because of their starkly different modalities. We present a learned metric localisation method that not only handles the modality difference, but is cheap to train, learning in a self-supervised fashion without metrically accurate ground truth. By evaluating across multiple real-world datasets, we demonstrate the robustness and versatility of our method for various sensor configurations. We pay particular attention to the use of millimetre wave radar, which, owing to its complex interaction with the scene and its immunity to weather and lighting, makes for a compelling and valuable use case.
Keep off the Grass: Permissible Driving Routes from Radar with Weak Audio Supervision
May 11, 2020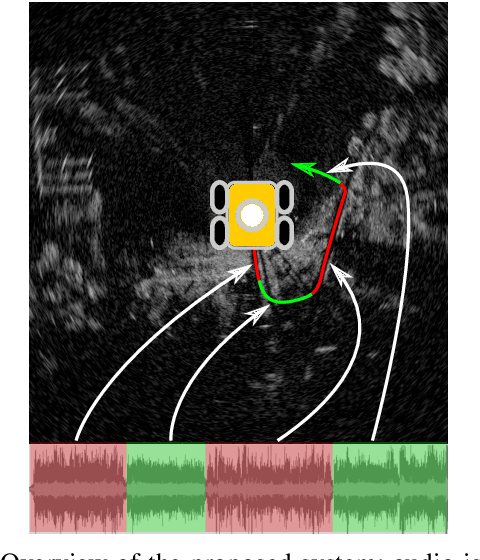
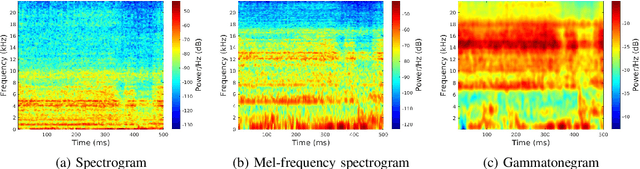
Reliable outdoor deployment of mobile robots requires the robust identification of permissible driving routes in a given environment. The performance of LiDAR and vision-based perception systems deteriorates significantly if certain environmental factors are present e.g. rain, fog, darkness. Perception systems based on FMCW scanning radar maintain full performance regardless of environmental conditions and with a longer range than alternative sensors. Learning to segment a radar scan based on driveability in a fully supervised manner is not feasible as labelling each radar scan on a bin-by-bin basis is both difficult and time-consuming to do by hand. We therefore weakly supervise the training of the radar-based classifier through an audio-based classifier that is able to predict the terrain type underneath the robot. By combining odometry, GPS and the terrain labels from the audio classifier, we are able to construct a terrain labelled trajectory of the robot in the environment which is then used to label the radar scans. Using a curriculum learning procedure, we then train a radar segmentation network to generalise beyond the initial labelling and to detect all permissible driving routes in the environment.
Sense-Assess-eXplain (SAX): Building Trust in Autonomous Vehicles in Challenging Real-World Driving Scenarios
May 05, 2020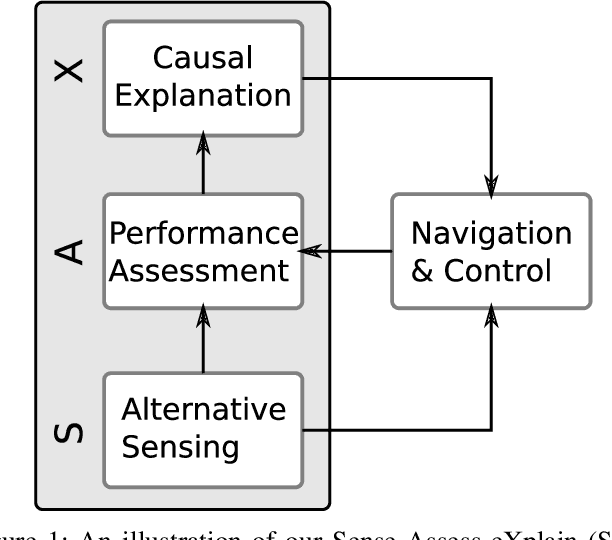

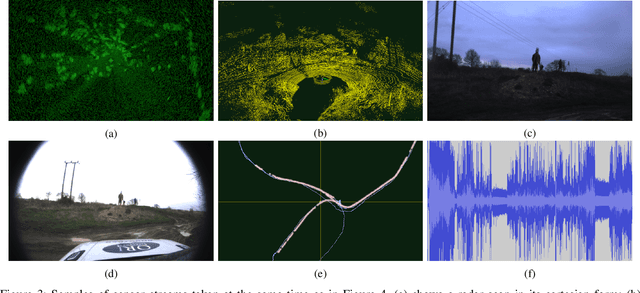

This paper discusses ongoing work in demonstrating research in mobile autonomy in challenging driving scenarios. In our approach, we address fundamental technical issues to overcome critical barriers to assurance and regulation for large-scale deployments of autonomous systems. To this end, we present how we build robots that (1) can robustly sense and interpret their environment using traditional as well as unconventional sensors; (2) can assess their own capabilities; and (3), vitally in the purpose of assurance and trust, can provide causal explanations of their interpretations and assessments. As it is essential that robots are safe and trusted, we design, develop, and demonstrate fundamental technologies in real-world applications to overcome critical barriers which impede the current deployment of robots in economically and socially important areas. Finally, we describe ongoing work in the collection of an unusual, rare, and highly valuable dataset.
RSS-Net: Weakly-Supervised Multi-Class Semantic Segmentation with FMCW Radar
Apr 02, 2020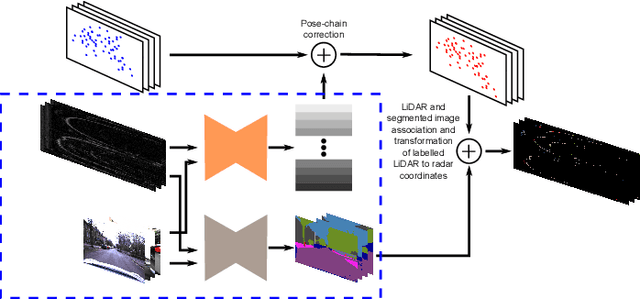
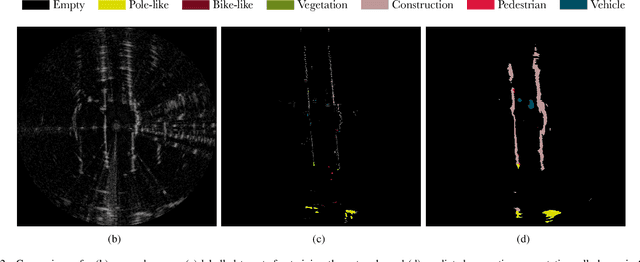
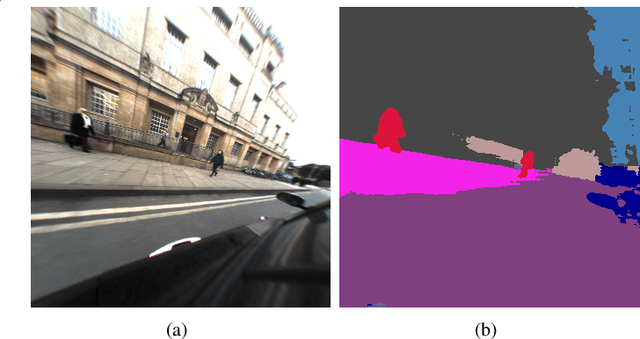
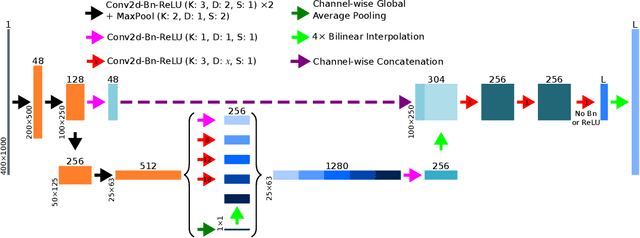
This paper presents an efficient annotation procedure and an application thereof to end-to-end, rich semantic segmentation of the sensed environment using FMCW scanning radar. We advocate radar over the traditional sensors used for this task as it operates at longer ranges and is substantially more robust to adverse weather and illumination conditions. We avoid laborious manual labelling by exploiting the largest radar-focused urban autonomy dataset collected to date, correlating radar scans with RGB cameras and LiDAR sensors, for which semantic segmentation is an already consolidated procedure. The training procedure leverages a state-of-the-art natural image segmentation system which is publicly available and as such, in contrast to previous approaches, allows for the production of copious labels for the radar stream by incorporating four camera and two LiDAR streams. Additionally, the losses are computed taking into account labels to the radar sensor horizon by accumulating LiDAR returns along a pose-chain ahead and behind of the current vehicle position. Finally, we present the network with multi-channel radar scan inputs in order to deal with ephemeral and dynamic scene objects.
Rainy screens: Collecting rainy datasets, indoors
Mar 10, 2020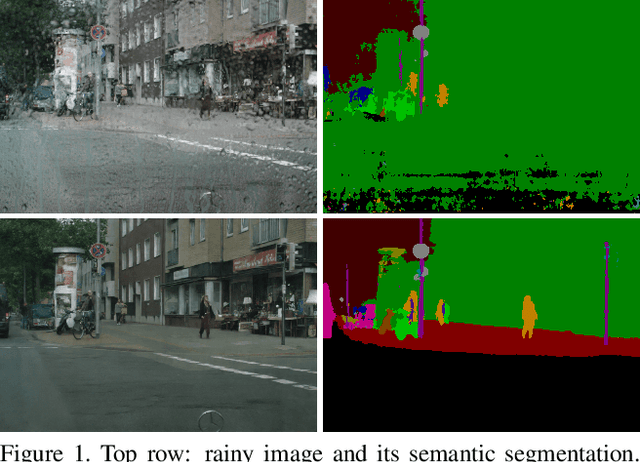

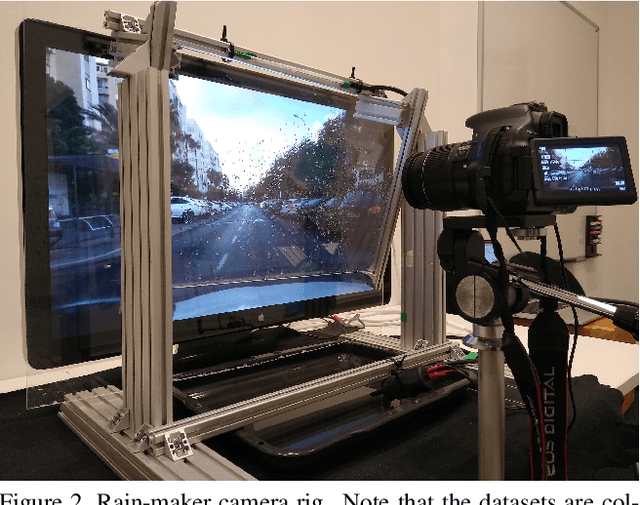
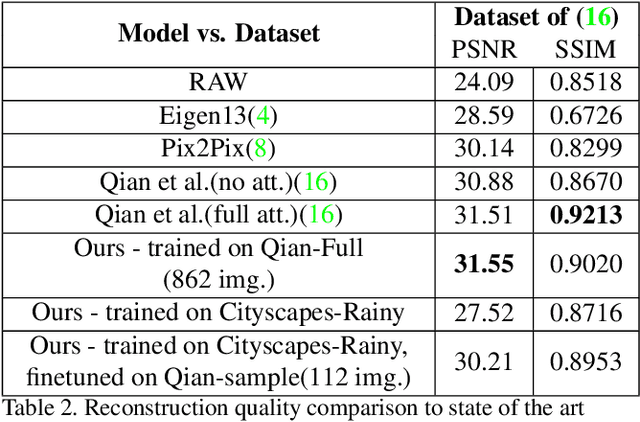
Acquisition of data with adverse conditions in robotics is a cumbersome task due to the difficulty in guaranteeing proper ground truth and synchronising with desired weather conditions. In this paper, we present a simple method - recording a high resolution screen - for generating diverse rainy images from existing clear ground-truth images that is domain- and source-agnostic, simple and scales up. This setup allows us to leverage the diversity of existing datasets with auxiliary task ground-truth data, such as semantic segmentation, object positions etc. We generate rainy images with real adherent droplets and rain streaks based on Cityscapes and BDD, and train a de-raining model. We present quantitative results for image reconstruction and semantic segmentation, and qualitative results for an out-of-sample domain, showing that models trained with our data generalize well.
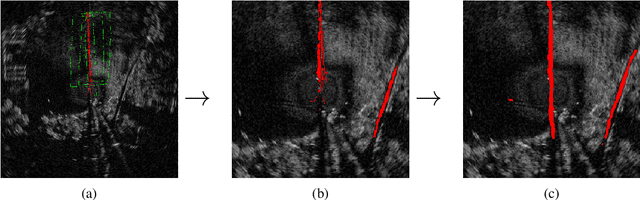
LiDAR Lateral Localisation Despite Challenging Occlusion from Traffic
Mar 10, 2020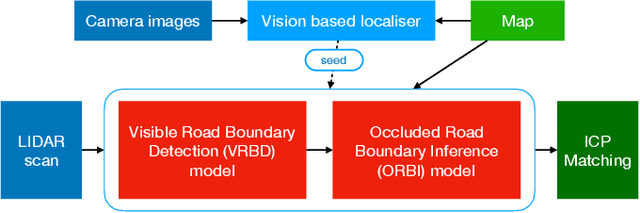
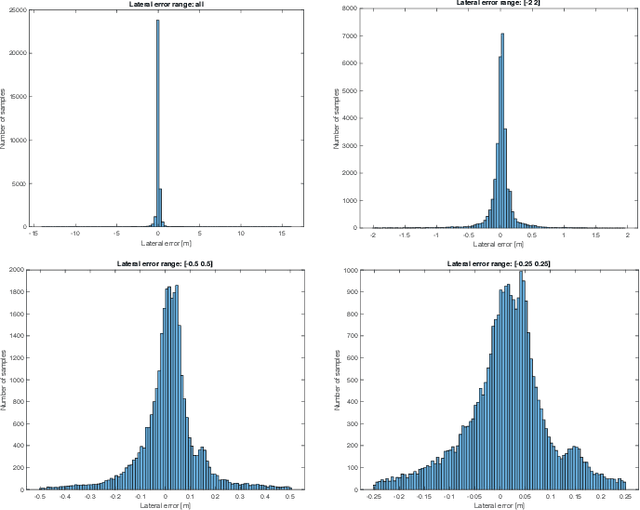
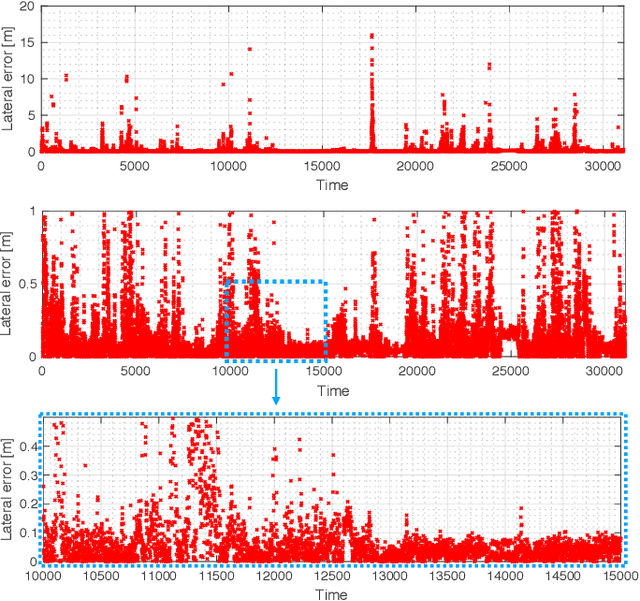
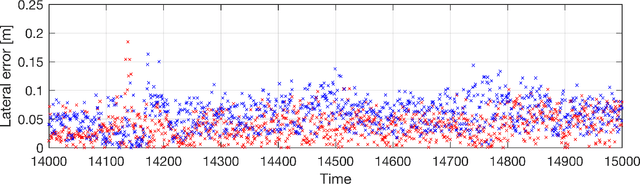
This paper presents a system for improving the robustness of LiDAR lateral localisation systems. This is made possible by including detections of road boundaries which are invisible to the sensor (due to occlusion, e.g. traffic) but can be located by our Occluded Road Boundary Inference Deep Neural Network. We show an example application in which fusion of a camera stream is used to initialise the lateral localisation. We demonstrate over four driven forays through central Oxford - totalling 40 km of driving - a gain in performance that inferring of occluded road boundaries brings.
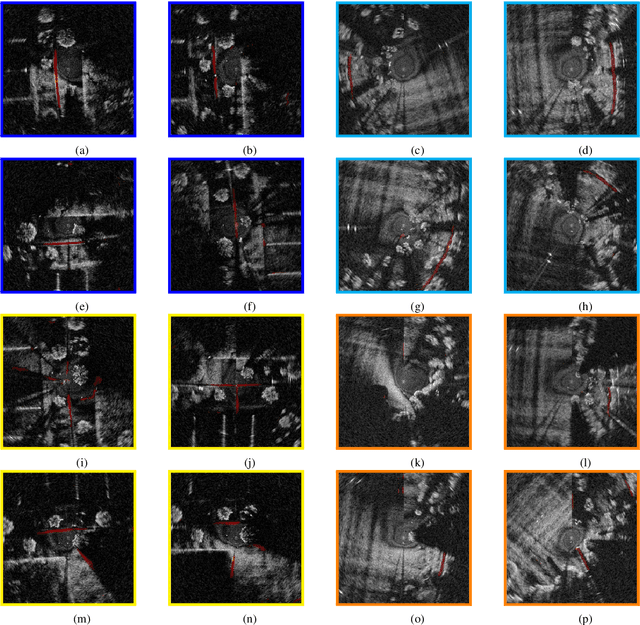
Look Around You: Sequence-based Radar Place Recognition with Learned Rotational Invariance
Mar 10, 2020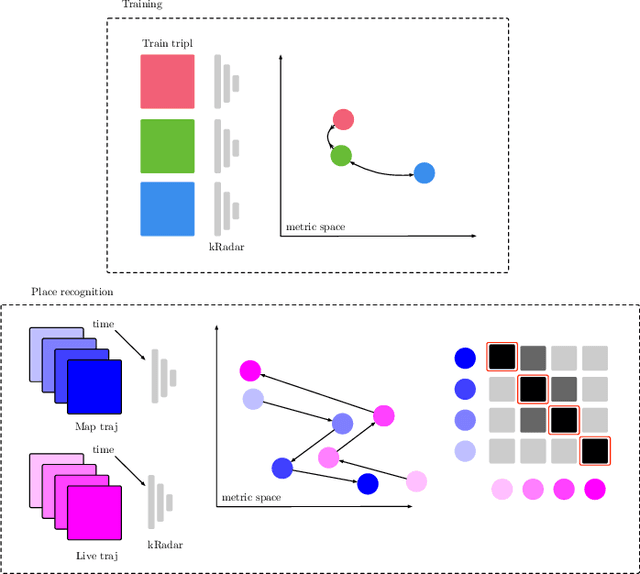
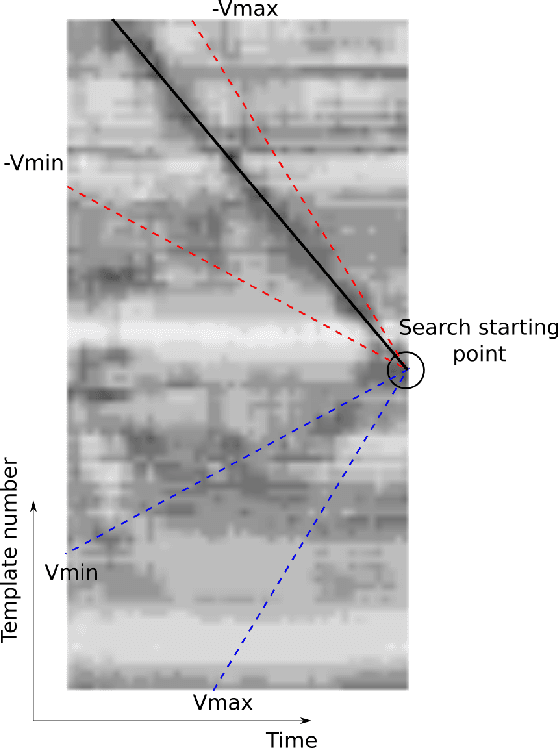
This paper details an application which yields significant improvements to the adeptness of place recognition with Frequency-Modulated Continuous-Wave radar - a commercially promising sensor poised for exploitation in mobile autonomy. We show how a rotationally-invariant metric embedding for radar scans can be integrated into sequence-based trajectory matching systems typically applied to videos taken by visual sensors. Due to the complete horizontal field of view inherent to the radar scan formation process, we show how this off-the-shelf sequence-based trajectory matching system can be manipulated to detect place matches when the vehicle is travelling down a previously visited stretch of road in the opposite direction. We demonstrate the efficacy of the approach on 26 km of challenging urban driving taken from the largest radar-focused urban autonomy dataset released to date -- showing a boost of 30% in recall at high levels of precision over a nearest neighbour approach.
Real-time Kinematic Ground Truth for the Oxford RobotCar Dataset
Feb 24, 2020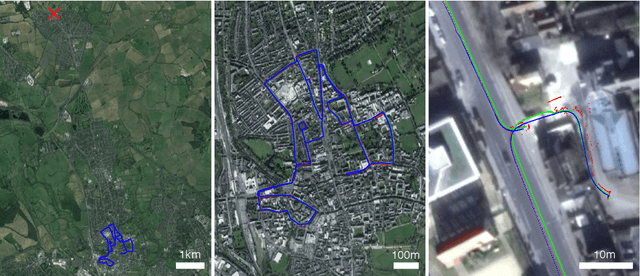

We describe the release of reference data towards a challenging long-term localisation and mapping benchmark based on the large-scale Oxford RobotCar Dataset. The release includes 72 traversals of a route through Oxford, UK, gathered in all illumination, weather and traffic conditions, and is representative of the conditions an autonomous vehicle would be expected to operate reliably in. Using post-processed raw GPS, IMU, and static GNSS base station recordings, we have produced a globally-consistent centimetre-accurate ground truth for the entire year-long duration of the dataset. Coupled with a planned online benchmarking service, we hope to enable quantitative evaluation and comparison of different localisation and mapping approaches focusing on long-term autonomy for road vehicles in urban environments challenged by changing weather.