 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrivacy-Preserving Structureless Visual Localization via Image Obfuscation
Apr 13, 2026Visual localization is the task of estimating the camera pose of an image relative to a scene representation. In practice, visual localization systems are often cloud-based. Naturally, this raises privacy concerns in terms of revealing private details through the images sent to the server or through the representations stored on the server. Privacy-preserving localization aims to avoid such leakage of private details. However, the resulting localization approaches are significantly more complex, slower, and less accurate than their non-privacy-preserving counterparts. In this paper, we consider structureless localization methods in the context of privacy preservation. Structureless methods represent the scene through a set of reference images with known camera poses and intrinsics. In contrast to existing methods proposing representations that are as privacy-preserving as possible, we study a simple image obfuscation approach based on common image operations, e.g., replacing RGB images with (semantic) segmentations. We show that existing structureless pipelines do not need any special adjustments, as modern feature matchers can match obfuscated images out of the box. The results are easy-to-implement pipelines that can ensure both the privacy of the query images and the scene representations. Detailed experiments on multiple datasets show that the resulting methods achieve state-of-the-art pose accuracy for privacy-preserving approaches.
Calibrated and Partially Calibrated Semi-Generalized Homographies
Mar 17, 2021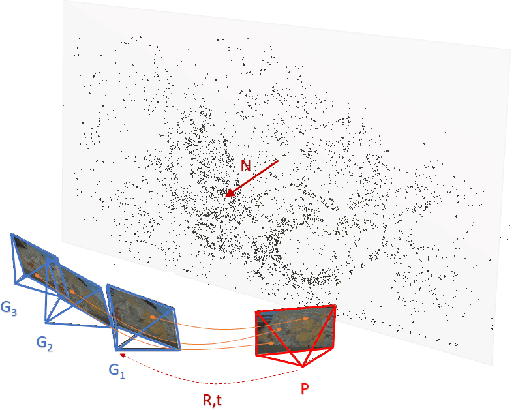
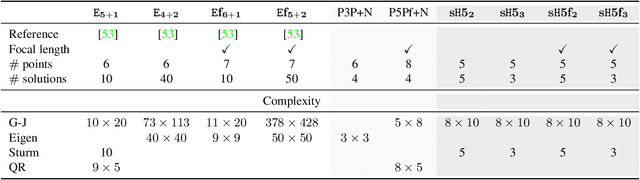
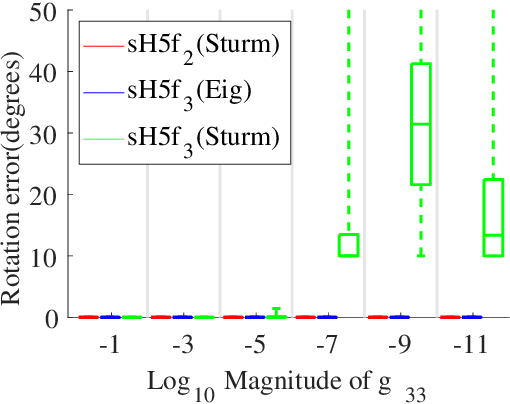
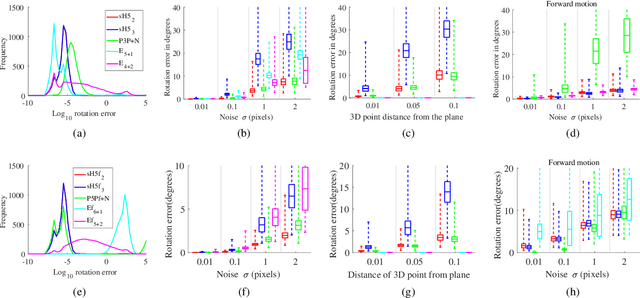
In this paper, we propose the first minimal solutions for estimating the semi-generalized homography given a perspective and a generalized camera. The proposed solvers use five 2D-2D image point correspondences induced by a scene plane. One of them assumes the perspective camera to be fully calibrated, while the other solver estimates the unknown focal length together with the absolute pose parameters. This setup is particularly important in structure-from-motion and image-based localization pipelines, where a new camera is localized in each step with respect to a set of known cameras and 2D-3D correspondences might not be available. As a consequence of a clever parametrization and the elimination ideal method, our approach only needs to solve a univariate polynomial of degree five or three. The proposed solvers are stable and efficient as demonstrated by a number of synthetic and real-world experiments.