Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain-aware Low Altitude Path Planning
May 11, 2025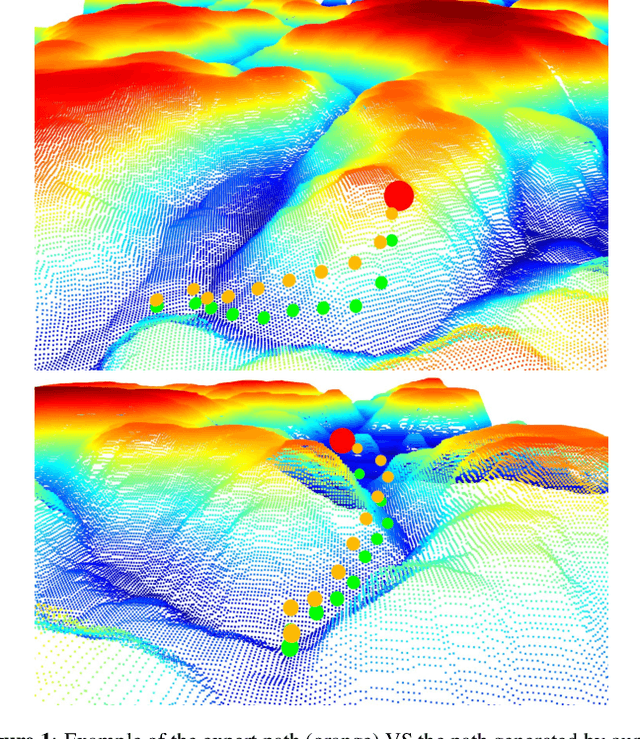
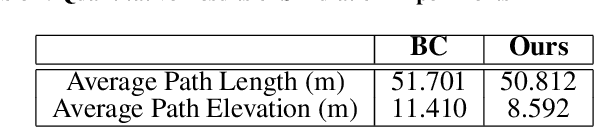
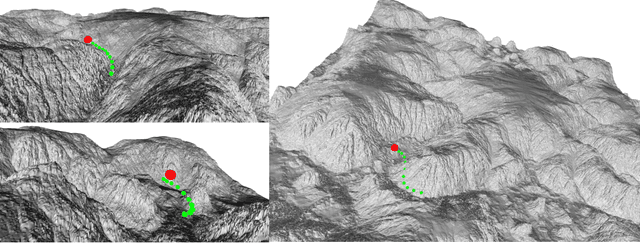
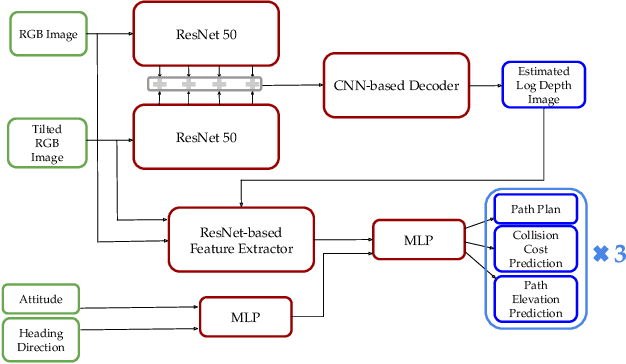
In this paper, we study the problem of generating low altitude path plans for nap-of-the-earth (NOE) flight in real time with only RGB images from onboard cameras and the vehicle pose. We propose a novel training method that combines behavior cloning and self-supervised learning that enables the learned policy to outperform the policy trained with standard behavior cloning approach on this task. Simulation studies are performed on a custom canyon terrain.
Via