 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Point Cloud Modeling via Self-Organizing Gaussian Mixture Models
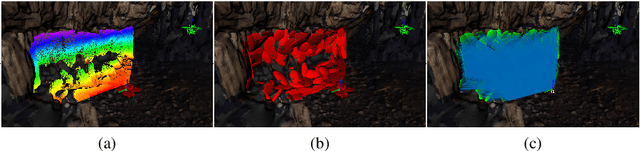
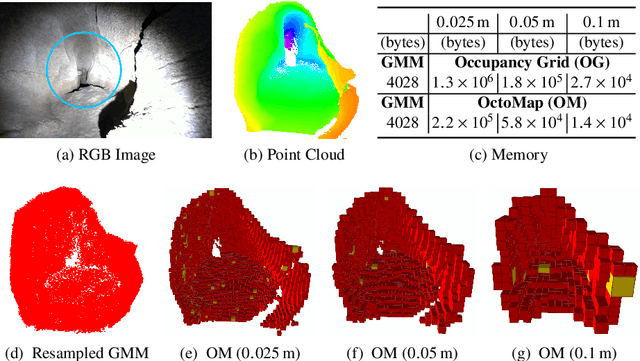
Jan 31, 2023This letter presents a continuous probabilistic modeling methodology for spatial point cloud data using finite Gaussian Mixture Models (GMMs) where the number of components are adapted based on the scene complexity. Few hierarchical and adaptive methods have been proposed to address the challenge of balancing model fidelity with size. Instead, state-of-the-art mapping approaches require tuning parameters for specific use cases, but do not generalize across diverse environments. To address this gap, we utilize a self-organizing principle from information-theoretic learning to automatically adapt the complexity of the GMM model based on the relevant information in the sensor data. The approach is evaluated against existing point cloud modeling techniques on real-world data with varying degrees of scene complexity.
Collaborative Human-Robot Exploration via Implicit Coordination
Sep 19, 2022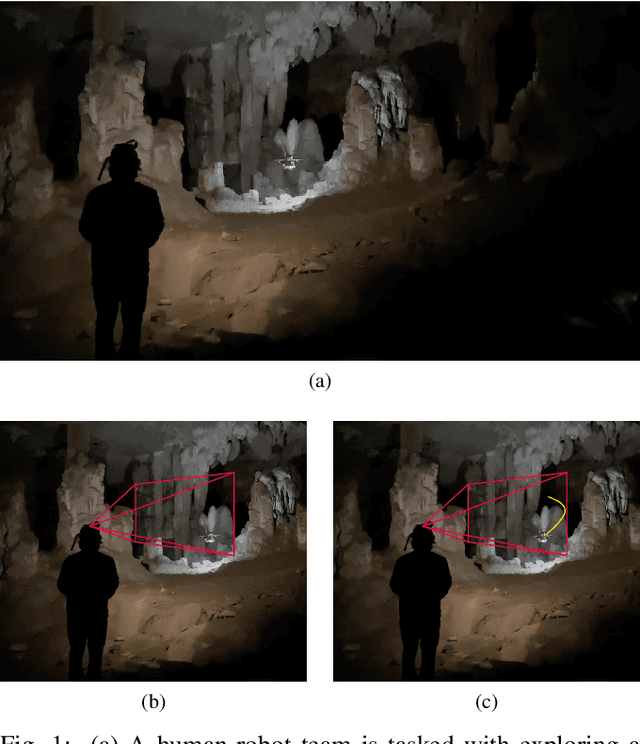
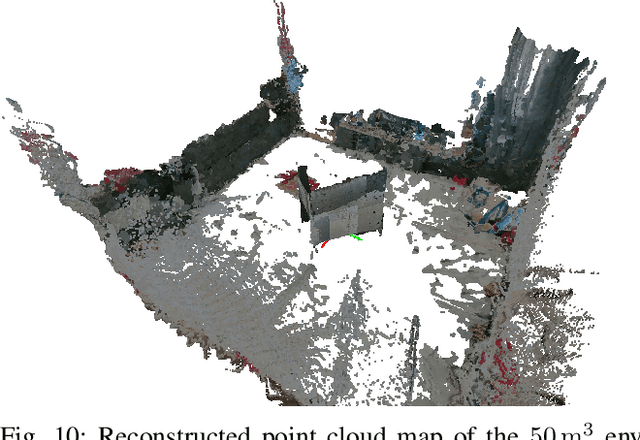
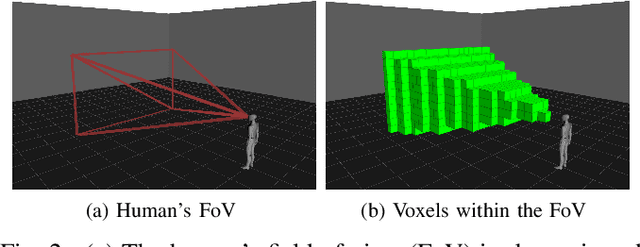
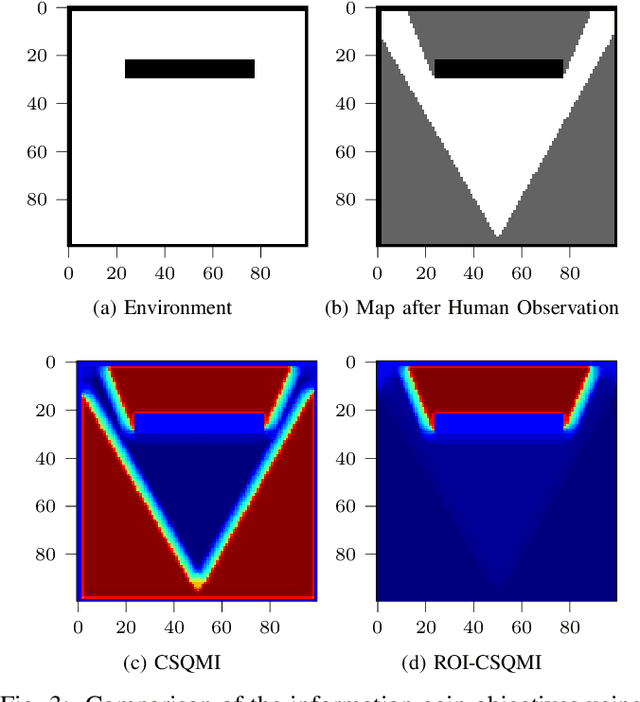
This paper develops a methodology for collaborative human-robot exploration that leverages implicit coordination. Most autonomous single- and multi-robot exploration systems require a remote operator to provide explicit guidance to the robotic team. Few works consider how to embed the human partner alongside robots to provide guidance in the field. A remaining challenge for collaborative human-robot exploration is efficient communication of goals from the human to the robot. In this paper we develop a methodology that implicitly communicates a region of interest from a helmet-mounted depth camera on the human's head to the robot and an information gain-based exploration objective that biases motion planning within the viewpoint provided by the human. The result is an aerial system that safely accesses regions of interest that may not be immediately viewable or reachable by the human. The approach is evaluated in simulation and with hardware experiments in a motion capture arena. Videos of the simulation and hardware experiments are available at: https://youtu.be/7jgkBpVFIoE.
Hierarchical Collision Avoidance for Adaptive-Speed Multirotor Teleoperation
Sep 17, 2022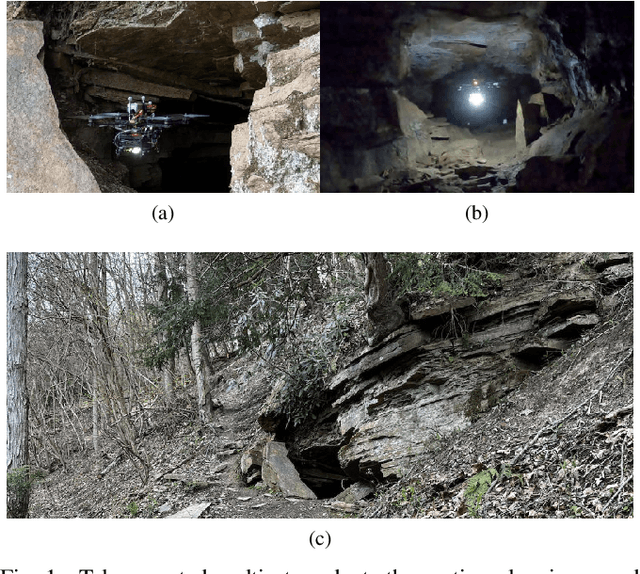
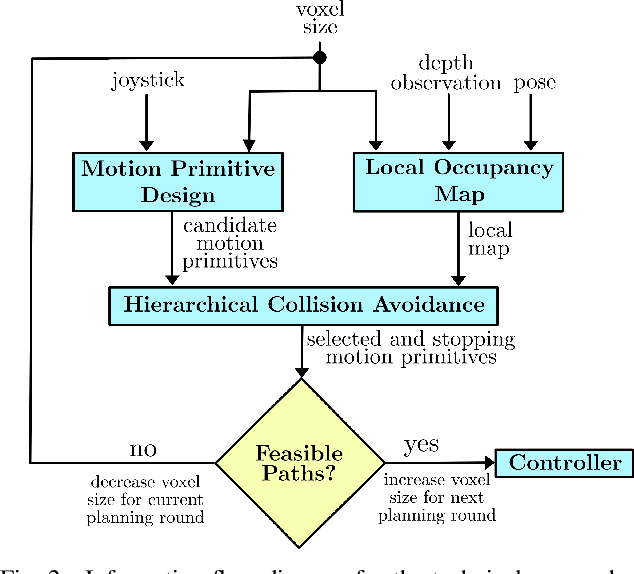
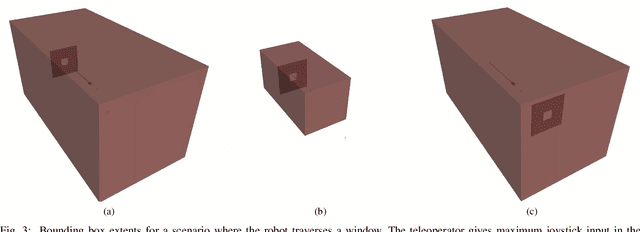
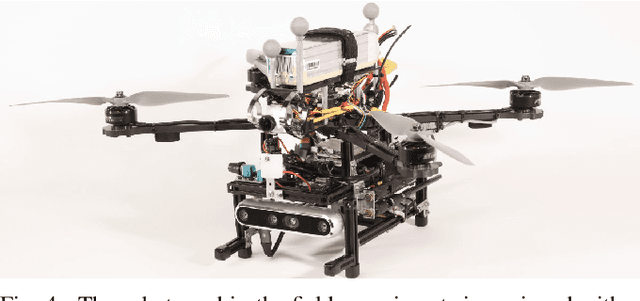
This paper improves safe motion primitives-based teleoperation of a multirotor by developing a hierarchical collision avoidance method that modulates maximum speed based on environment complexity and perceptual constraints. Safe speed modulation is challenging in environments that exhibit varying clutter. Existing methods fix maximum speed and map resolution, which prevents vehicles from accessing tight spaces and places the cognitive load for changing speed on the operator. We address these gaps by proposing a high-rate (10 Hz) teleoperation approach that modulates the maximum vehicle speed through hierarchical collision checking. The hierarchical collision checker simultaneously adapts the local map's voxel size and maximum vehicle speed to ensure motion planning safety. The proposed methodology is evaluated in simulation and real-world experiments and compared to a non-adaptive motion primitives-based teleoperation approach. The results demonstrate the advantages of the proposed teleoperation approach both in time taken and the ability to complete the task without requiring the user to specify a maximum vehicle speed.
An imminent collision monitoring system with safe stopping interventions for autonomous aerial flights
Jun 17, 2022
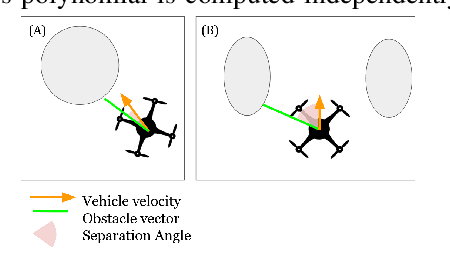

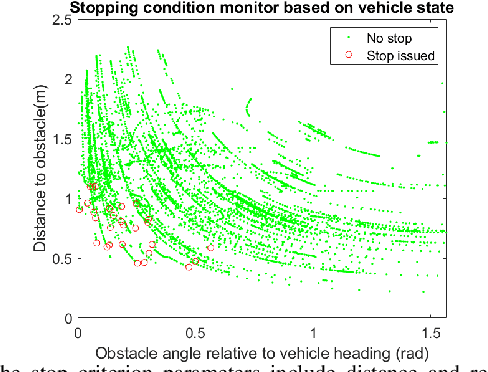
Collision avoidance requires tradeoffs in planning time horizons. Depending on the planner, safety cannot always be guaranteed in uncertain environments given map updates. To mitigate situations where the planner leads the vehicle into a state of collision or the vehicle reaches a point where no trajectories are feasible, we propose a continuous collision checking algorithm. The imminent collision checking system continuously monitors vehicle safety, and plans a safe trajectory that leads the vehicle to a stop within the observed map. We test our proposed pipeline alongside a teleoperated navigation in real-life experiments, and in simulated random-forest and warehouse environments where we show that with our method, we are able to mitigate collisions with a success rate of at least 90\%.
Scalable Distributed Planning for Multi-Robot, Multi-Target Tracking
Jul 18, 2021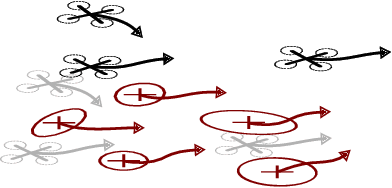
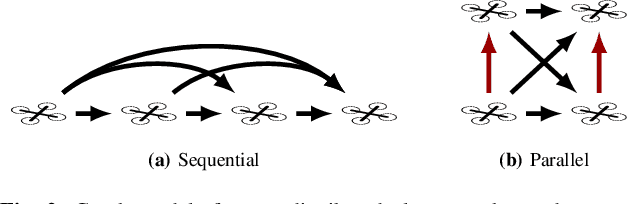
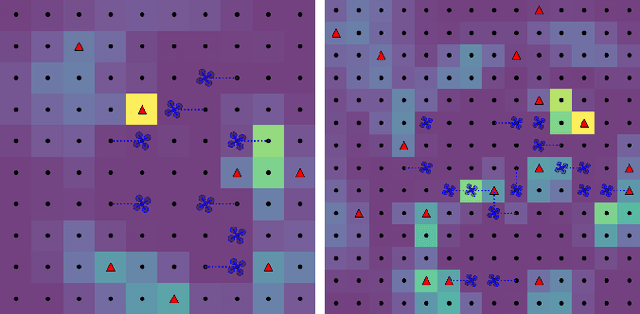
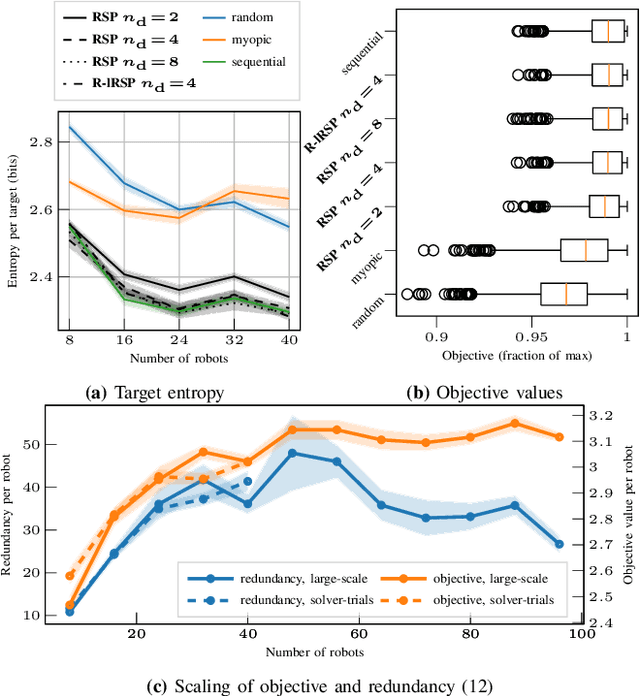
In multi-robot multi-target tracking, robots coordinate to monitor groups of targets moving about an environment. We approach planning for such scenarios by formulating a receding-horizon, multi-robot sensing problem with a mutual information objective. Such problems are NP-Hard in general. Yet, our objective is submodular which enables certain greedy planners to guarantee constant-factor suboptimality. However, these greedy planners require robots to plan their actions in sequence, one robot at a time, so planning time is at least proportional to the number of robots. Solving these problems becomes intractable for large teams, even for distributed implementations. Our prior work proposed a distributed planner (RSP) which reduces this number of sequential steps to a constant, even for large numbers of robots, by allowing robots to plan in parallel while ignoring some of each others' decisions. Although that analysis is not applicable to target tracking, we prove a similar guarantee, that RSP planning approaches performance guarantees for fully sequential planners, by employing a novel bound which takes advantage of the independence of target motions to quantify effective redundancy between robots' observations and actions. Further, we present analysis that explicitly accounts for features of practical implementations including approximations to the objective and anytime planning. Simulation results -- available via open source release -- for target tracking with ranging sensors demonstrate that our planners consistently approach the performance of sequential planning (in terms of position uncertainty) given only 2--8 planning steps and for as many as 96 robots with a 24x reduction in the number of sequential steps in planning. Thus, this work makes planning for multi-robot target tracking tractable at much larger scales than before, for practical planners and general tracking problems.
Feedback Linearization for Quadrotors with a Learned Acceleration Error Model
May 28, 2021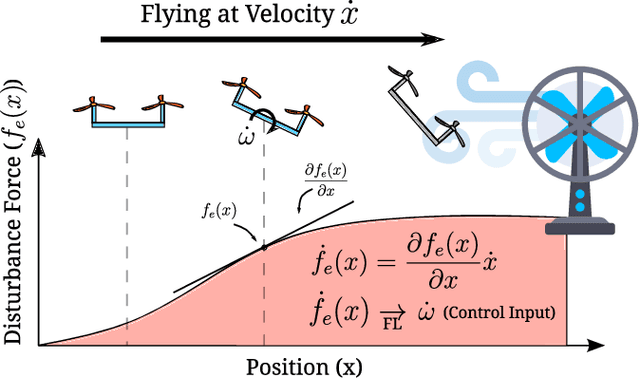
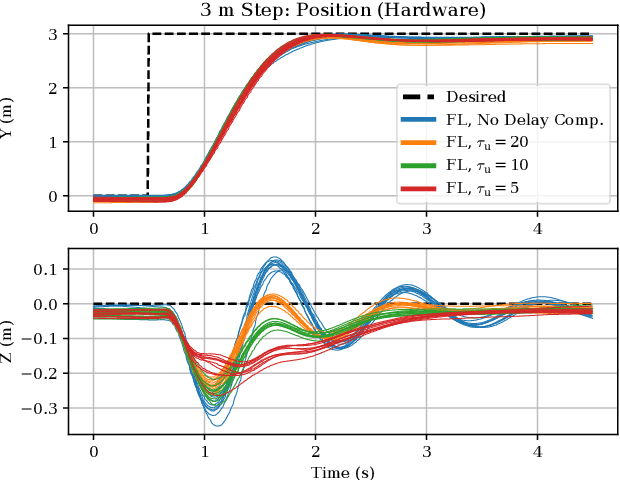
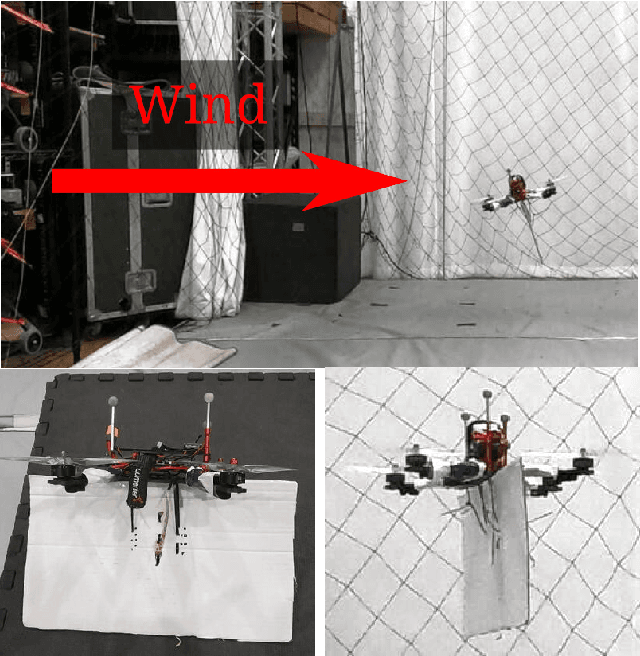
This paper enhances the feedback linearization controller for multirotors with a learned acceleration error model and a thrust input delay mitigation model. Feedback linearization controllers are theoretically appealing but their performance suffers on real systems, where the true system does not match the known system model. We take a step in reducing these robustness issues by learning an acceleration error model, applying this model in the position controller, and further propagating it forward to the attitude controller. We show how this approach improves performance over the standard feedback linearization controller in the presence of unmodeled dynamics and repeatable external disturbances in both simulation and hardware experiments. We also show that our thrust control input delay model improves the step response on hardware systems.
Volumetric Objectives for Multi-Robot Exploration of Three-Dimensional Environments
Mar 26, 2021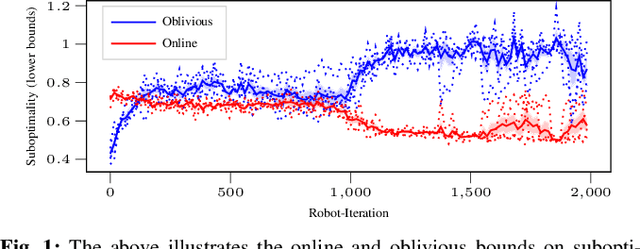
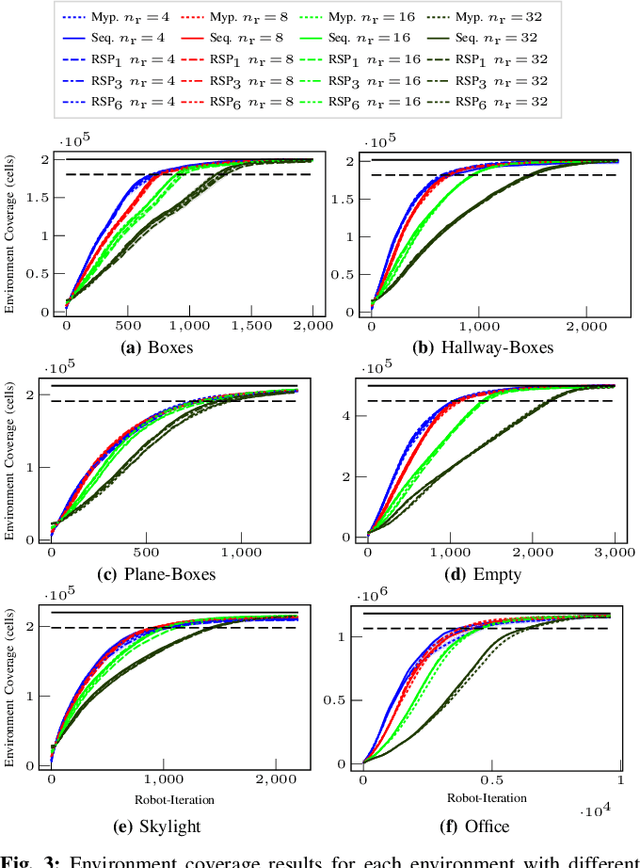
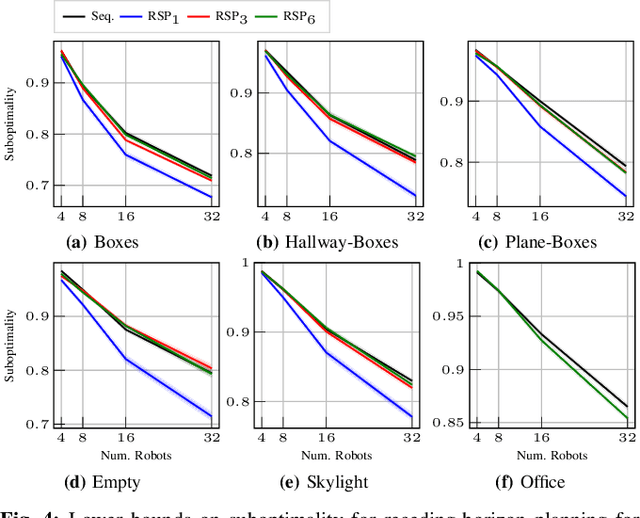
Volumetric objectives for exploration and perception tasks seek to capture a sense of value (or reward) for hypothetical observations at one or more camera views for robots operating in unknown environments. For example, a volumetric objective may reward robots proportionally to the expected volume of unknown space to be observed. We identify connections between existing information-theoretic and coverage objectives in terms of expected coverage, particularly that mutual information without noise is a special case of expected coverage. Likewise, we provide the first comparison, of which we are aware, between information-based approximations and coverage objectives for exploration, and we find, perhaps surprisingly, that coverage objectives can significantly outperform information-based objectives in practice. Additionally, the analysis for information and coverage objectives demonstrates that Randomized Sequential Partitions -- a method for efficient distributed sensor planning -- applies for both classes of objectives, and we provide simulation results in a variety of environments for as many as 32 robots.
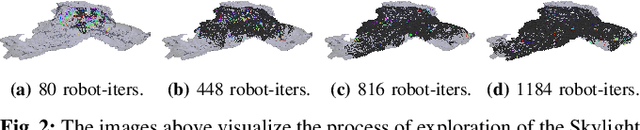
Rapid and High-Fidelity Subsurface Exploration with Multiple Aerial Robots
Dec 19, 2020
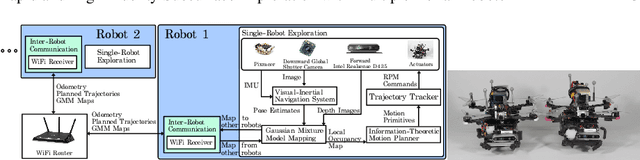
This paper develops a communication-efficient distributed mapping approach for rapid exploration of a cave by a multi-robot team. Subsurface planetary exploration is an unsolved problem challenged by communication, power, and compute constraints. Prior works have addressed the problems of rapid exploration and leveraging multiple systems to increase exploration rate; however, communication considerations have been left largely unaddressed. This paper bridges this gap in the state of the art by developing distributed perceptual modeling that enables high-fidelity mapping while remaining amenable to low-bandwidth communication channels. The approach yields significant gains in exploration rate for multi-robot teams as compared to state-of-the-art approaches. The work is evaluated through simulation studies and hardware experiments in a wild cave in West Virginia.
Rotational Error Metrics for Quadrotor Control
Nov 24, 2020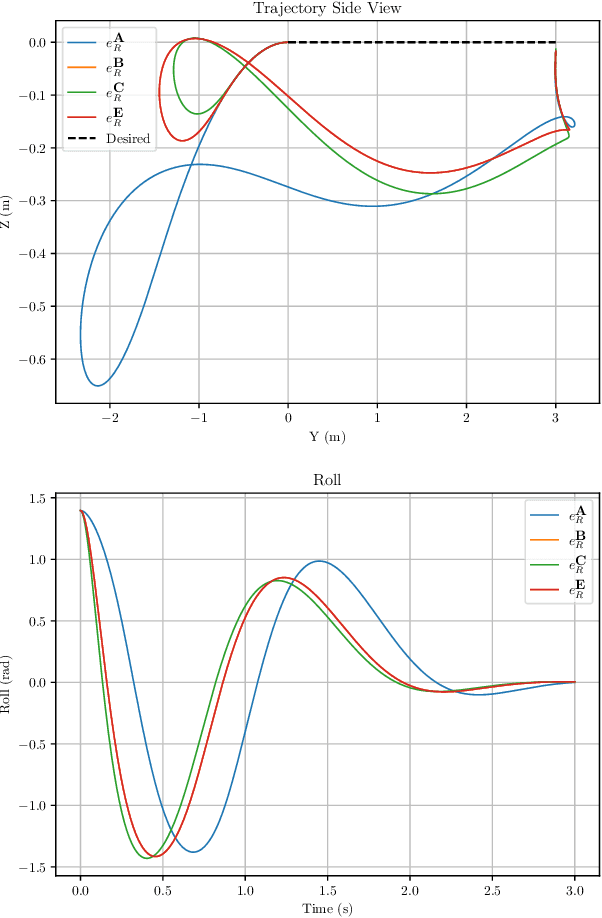
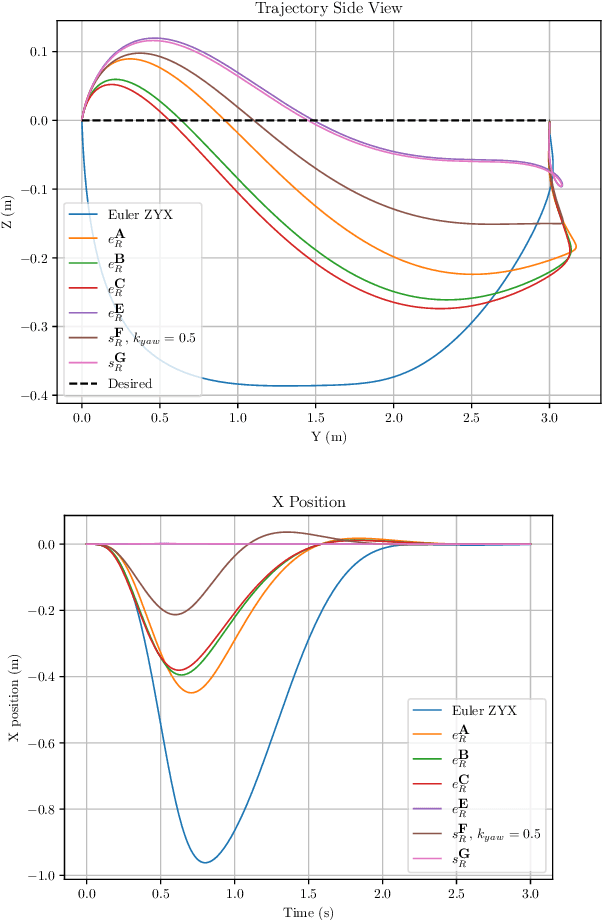
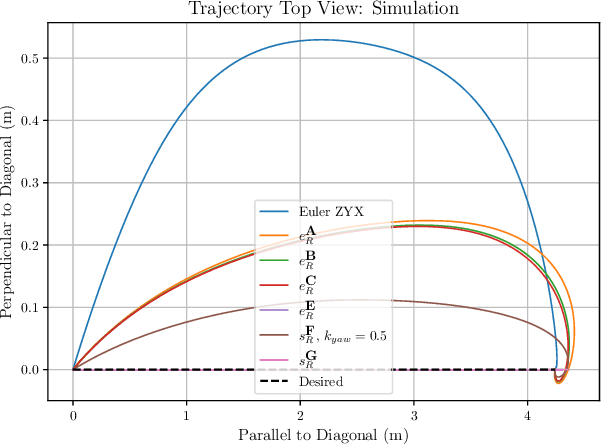
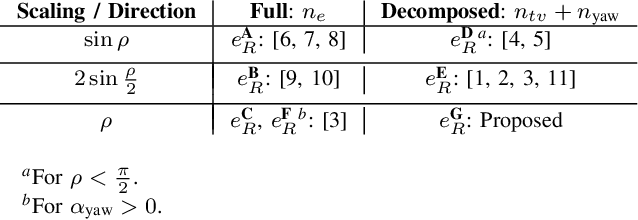
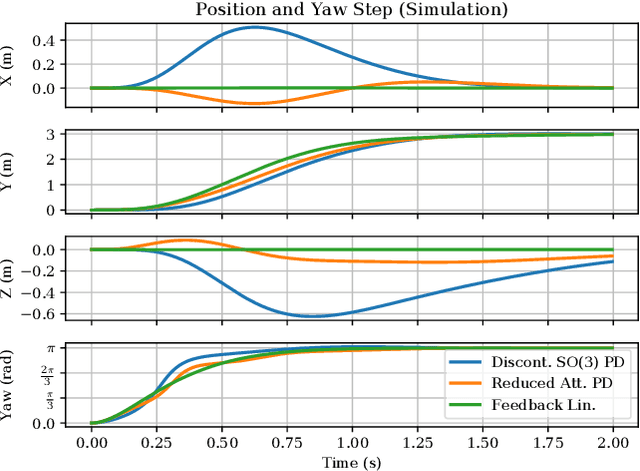
We analyze and experimentally compare various rotational error metrics for use in quadrotor controllers. Traditional quadrotor attitude controllers have used Euler angles or the full rotation to compute an attitude error and scale that to compute a control response. Recently, several works have shown that prioritizing quadrotor tilt, or thrust vector error, in the attitude controller leads to improved position control, especially in situations with large yaw error. We provide a catalog of proposed rotational metrics, place them into the same framework, and show that we can independently reason about and design the magnitude of the response and the direction of the response. Existing approaches mainly fall into two categories: (1) metrics that induce a response in the shortest direction to correct the full rotation error and (2) metrics that combine a response in the shortest direction to correct tilt error with the shortest direction to correct yaw error. We show experimental results to highlight the salient differences between the rotational error metrics. See https://alspitz.github.io/roterrormetrics.html for an interactive simulation visualizing the experiments performed.
MRFMap: Online Probabilistic 3D Mapping using Forward Ray Sensor Models
Jun 13, 2020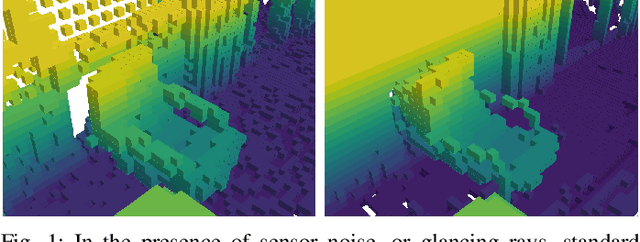
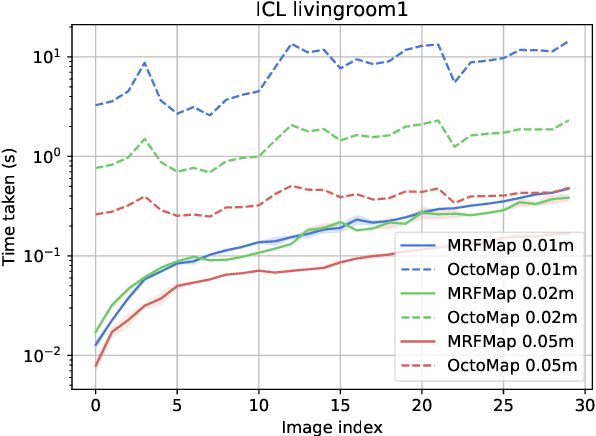
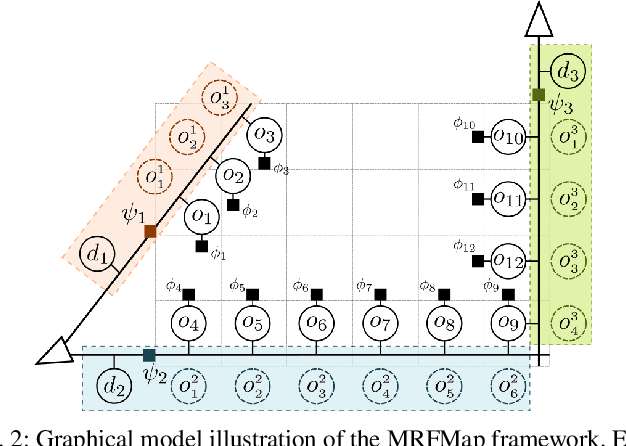
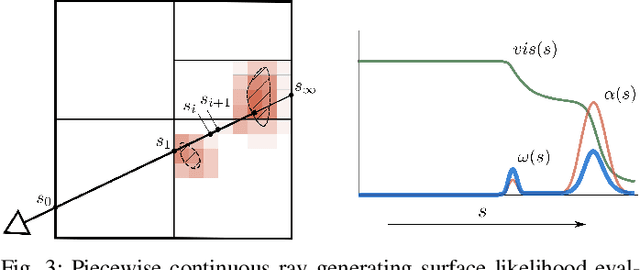
Traditional dense volumetric representations for robotic mapping make simplifying assumptions about sensor noise characteristics due to computational constraints. We present a framework that, unlike conventional occupancy grid maps, explicitly models the sensor ray formation for a depth sensor via a Markov Random Field and performs loopy belief propagation to infer the marginal probability of occupancy at each voxel in a map. By explicitly reasoning about occlusions our approach models the correlations between adjacent voxels in the map. Further, by incorporating learnt sensor noise characteristics we perform accurate inference even with noisy sensor data without ad-hoc definitions of sensor uncertainty. We propose a new metric for evaluating probabilistic volumetric maps and demonstrate the higher fidelity of our approach on simulated as well as real-world datasets.