 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptiveON: Adaptive Outdoor Navigation Method For Stable and Reliable Actions
May 15, 2022
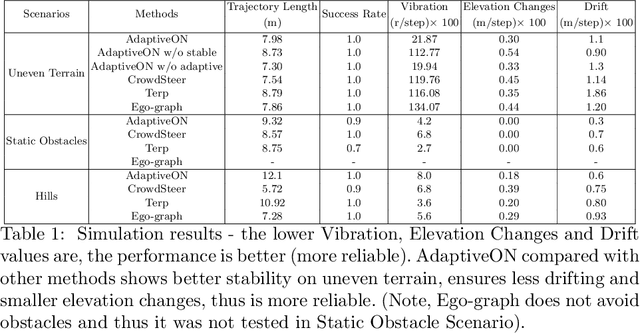
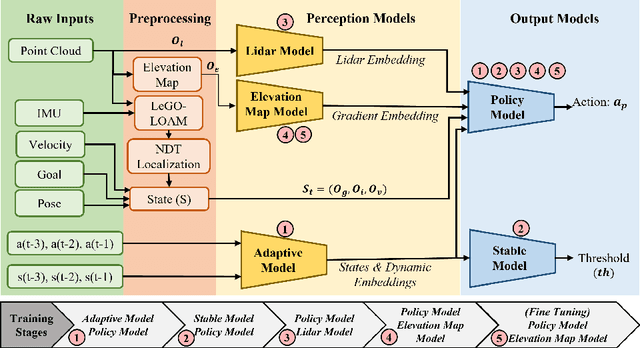
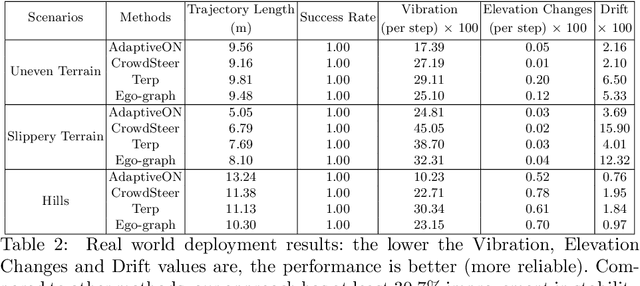
We present a novel outdoor navigation algorithm to generate stable and efficient actions to navigate a robot to the goal. We use a multi-stage training pipeline and show that our model produces policies that result in stable and reliable robot navigation on complex terrains. Based on the Proximal Policy Optimization (PPO) algorithm, we developed a novel method to achieve multiple capabilities for outdoor navigation tasks, namely: alleviating the robot's drifting, keeping the robot stable on bumpy terrains, avoiding climbing on hills with steep elevation changes, and collision avoidance. Our training process mitigates the reality(sim-to-real) gap by introducing more generalized environmental and robotic parameters and training with rich features of Lidar perception in the Unity simulator. We evaluate our method in both simulation and the real world with Clearpath Husky and Jackal. Additionally, we compare our method against the state-of-the-art approaches and show that in the real world it improves stability by at least 30.7% on uneven terrains, reduces drifting by 8.08%, and for high hills our trained policy keeps small changes of the elevation of the robot at each motion step by preventing the robot from moving on areas with high gradients.
Risk-aware UAV-UGV Rendezvous with Chance-Constrained Markov Decision Process
Apr 10, 2022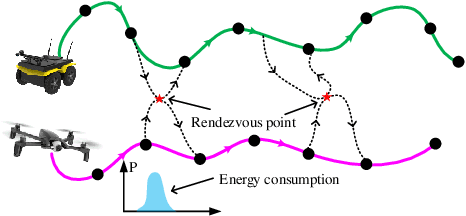
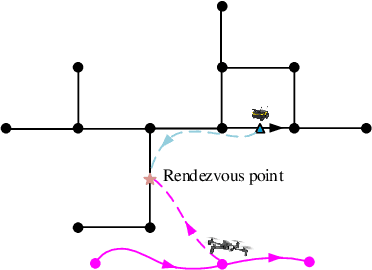
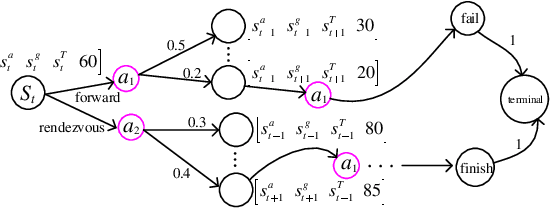
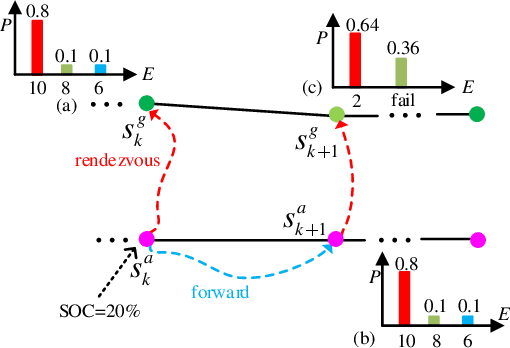
We study a chance-constrained variant of the cooperative aerial-ground vehicle routing problem, in which an Unmanned Aerial Vehicle (UAV) with limited battery capacity and an Unmanned Ground Vehicle (UGV) that can also act as a mobile recharging station need to jointly accomplish a mission such as monitoring a set of points. Due to the limited battery capacity of the UAV, two vehicles sometimes have to deviate from their task to rendezvous and recharge the UAV\@. Unlike prior work that has focused on the deterministic case, we address the challenge of stochastic energy consumption of the UAV\@. We are interested in finding the optimal policy that decides when and where to rendezvous such that the expected travel time of the UAV is minimized and the probability of running out of charge is less than a user-defined tolerance. We formulate this problem as a Chance Constrained Markov Decision Process (CCMDP). To the best knowledge of the authors, this is the first CMDP-based formulation for the UAV-UGV routing problems under power consumption uncertainty. We adopt a Linear Programming (LP) based approach to solve the problem optimally. We demonstrate the effectiveness of our formulation in the context of an Intelligence Surveillance and Reconnaissance (ISR) mission.
AquaVis: A Perception-Aware Autonomous Navigation Framework for Underwater Vehicles
Oct 04, 2021
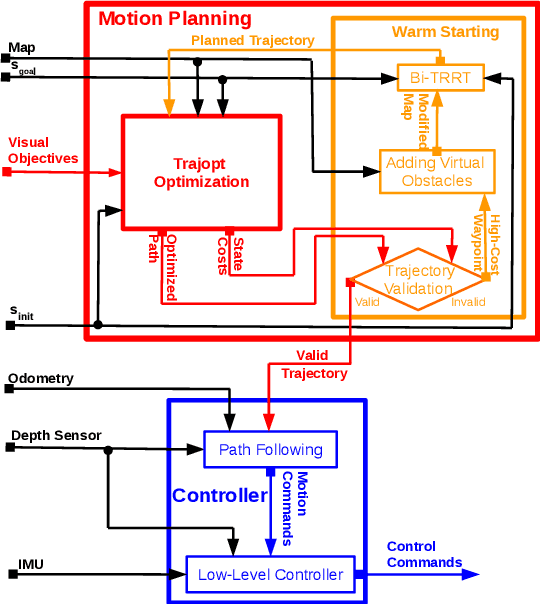
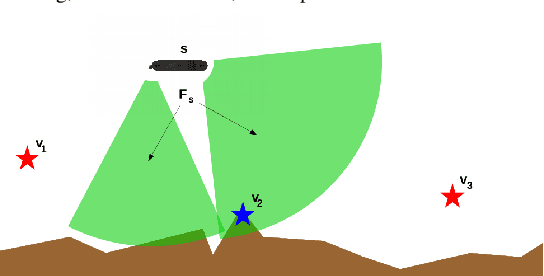
Visual monitoring operations underwater require both observing the objects of interest in close-proximity, and tracking the few feature-rich areas necessary for state estimation.This paper introduces the first navigation framework, called AquaVis, that produces on-line visibility-aware motion plans that enable Autonomous Underwater Vehicles (AUVs) to track multiple visual objectives with an arbitrary camera configuration in real-time. Using the proposed pipeline, AUVs can efficiently move in 3D, reach their goals while avoiding obstacles safely, and maximizing the visibility of multiple objectives along the path within a specified proximity. The method is sufficiently fast to be executed in real-time and is suitable for single or multiple camera configurations. Experimental results show the significant improvement on tracking multiple automatically-extracted points of interest, with low computational overhead and fast re-planning times
Dynamic Autonomous Surface Vehicle Control and Applications in Environmental Monitoring
Mar 29, 2021
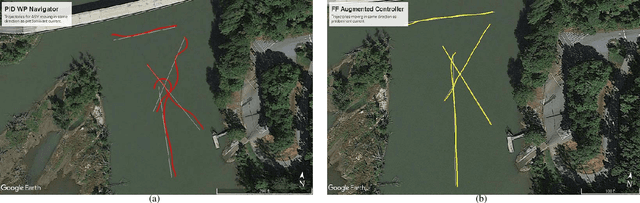

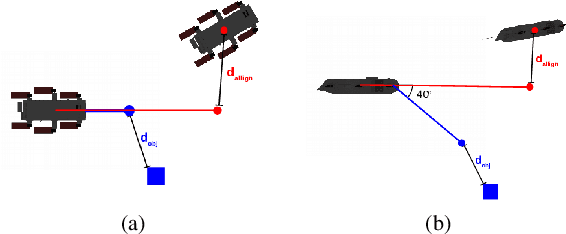
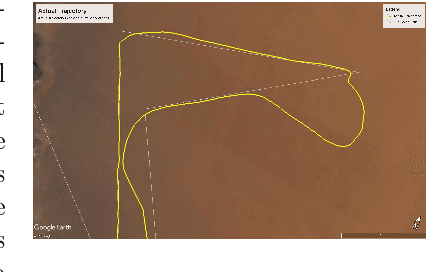
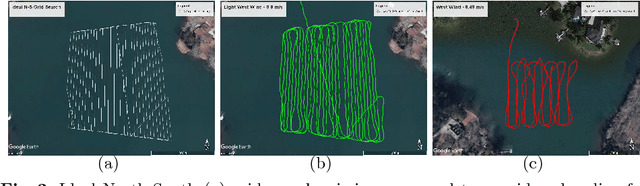
This paper addresses the problem of robotic operations in the presence of adversarial forces. We presents a complete framework for survey operations: waypoint generation,modelling of forces and tuning the control. In many applications of environmental monitoring, search and exploration, and bathymetric mapping, the vehicle has to traverse in straight lines parallel to each other, ensuring there are no gaps and no redundant coverage. During operations with an Autonomous Surface Vehicle (ASV) however, the presence of wind and/or currents produces external forces acting on the vehicle which quite often divert it from its intended path. Similar issues have been encountered during aerial or underwater operations. By measuring these phenomena, wind and current, and modelling their impact on the vessel, actions can be taken to alleviate their effect and ensure the correct trajectory is followed.
Dynamic Autonomous Surface Vehicle Controls Under Changing Environmental Forces
Aug 07, 2019
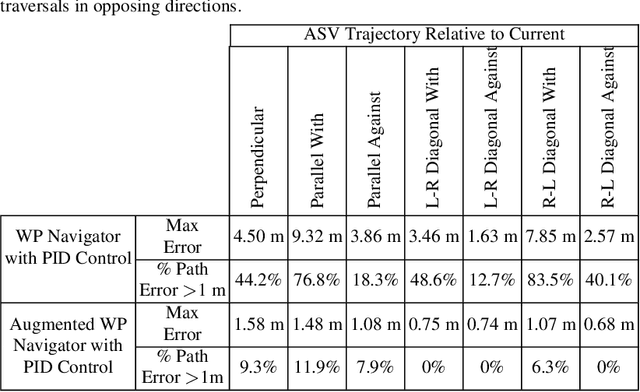
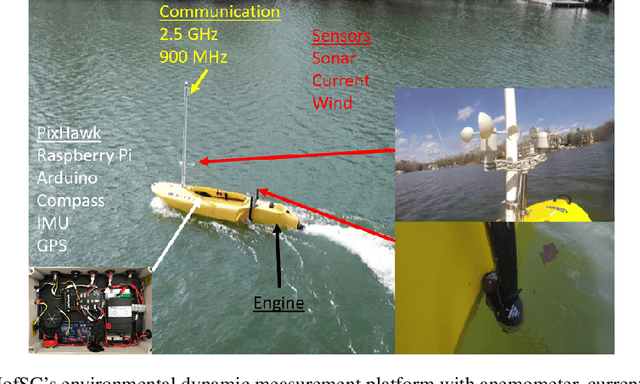
The ability to navigate, search, and monitor dynamic marine environments such as ports, deltas, tributaries, and rivers presents several challenges to both human operated and autonomously operated surface vehicles. Human data collection and monitoring is overly taxing and inconsistent when faced with large coverage areas, disturbed environments, and potentially uninhabitable situations. In contrast,the same missions become achievable with Autonomous Surface Vehicles (ASVs)configured and capable of accurately maneuvering in such environments. The two dynamic factors that present formidable challenges to completing precise maneuvers in coastal and moving waters are currents and winds. In this work, we present novel and inexpensive methods for sensing these external forces, together with methods for accurately controlling an ASV in the presence of such external forces. The resulting platform is capable of deploying bathymetric and water quality monitoring sensors. Experimental results in local lakes and rivers demonstrate the feasibility of the proposed approach.
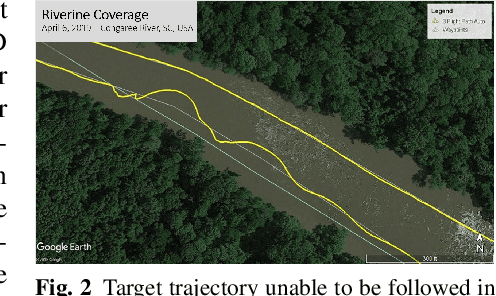
Riverine Coverage with an Autonomous Surface Vehicle over Known Environments
Aug 07, 2019
Environmental monitoring and surveying operations on rivers currently are performed primarily with manually-operated boats. In this domain, autonomous coverage of areas is of vital importance, for improving both the quality and the efficiency of coverage. This paper leverages human expertise in river exploration and data collection strategies to automate and optimize these processes using autonomous surface vehicles(ASVs). In particular, three deterministic algorithms for both partial and complete coverage of a river segment are proposed,providing varying path length, coverage density, and turning patterns. These strategies resulted in increases in accuracy and efficiency compared to human performance.The proposed methods were extensively tested in simulation using maps of real rivers of different shapes and sizes. In addition, to verify their performance in real world operations, the algorithms were deployed successfully on several parts of the Congaree River in South Carolina, USA, resulting in total of more than 35km of coverage trajectories in the field.
Meander Based River Coverage by an Autonomous Surface Vehicle
Aug 07, 2019
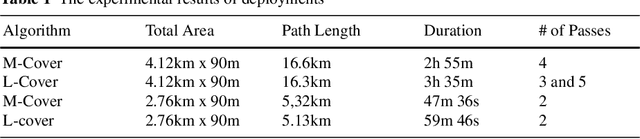
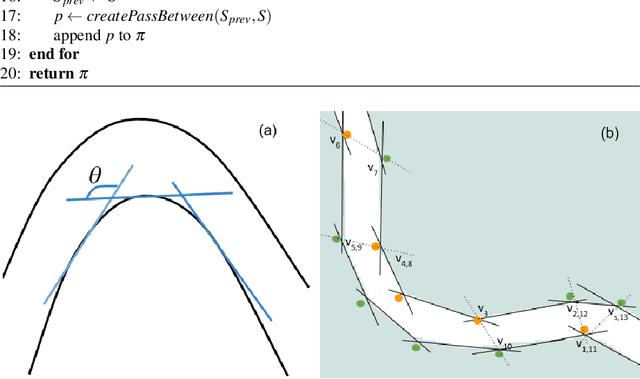
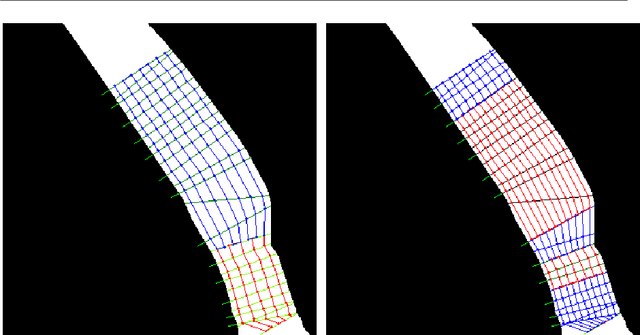
Autonomous coverage has tremendous importance for environmental surveying and exploration tasks performed on rivers both in terms of efficiency and data collection quality. Most surveys of rivers are performed manually using quite similar approaches. Using these practices to automate these processes improves the quality of survey operations. In addition to human expertise on the type of patterns,the coverage of a river can be optimized using the river meanders to determine the direction of coverage. In this work we use the implicit information on the speed of the water current, inferred from the curves of the river, to reduce the cost of cover-age. We use autonomous surface vehicles (ASVs) to deploy the proposed methods and demonstrate the efficiency of our method. In addition we compare the proposed method with previous coverage techniques developed in our lab. When taking into account meanders the coverage time has been decreased in average by more than 20%. The deployments of the ASVs were performed on the Congaree River, SC,USA, and resulted in more than 27km of total coverage trajectories.
Experimental Comparison of Open Source Visual-Inertial-Based State Estimation Algorithms in the Underwater Domain
Apr 03, 2019
A plethora of state estimation techniques have appeared in the last decade using visual data, and more recently with added inertial data. Datasets typically used for evaluation include indoor and urban environments, where supporting videos have shown impressive performance. However, such techniques have not been fully evaluated in challenging conditions, such as the marine domain. In this paper, we compare ten recent open-source packages to provide insights on their performance and guidelines on addressing current challenges. Specifically, we selected direct methods and tightly-coupled optimization techniques that fuse camera and Inertial Measurement Unit (IMU) data together. Experiments are conducted by testing all packages on datasets collected over the years with underwater robots in our laboratory. All the datasets are made available online.
Navigation in the Presence of Obstacles for an Agile Autonomous Underwater Vehicle
Mar 28, 2019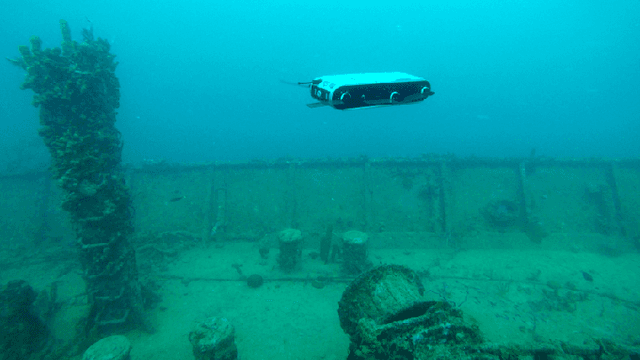
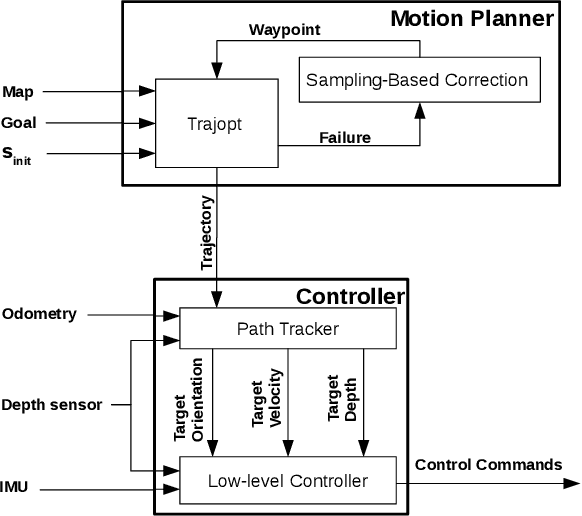

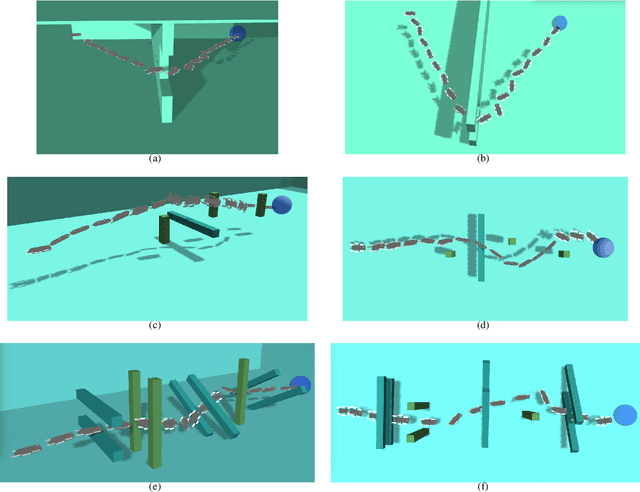
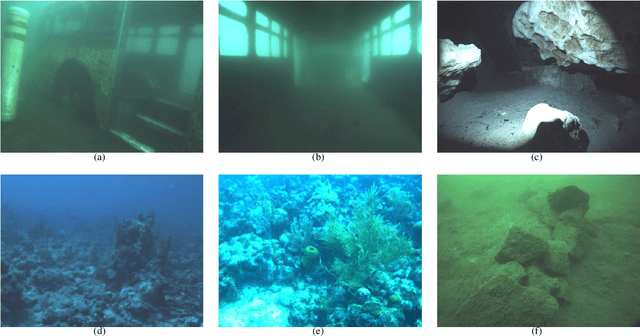
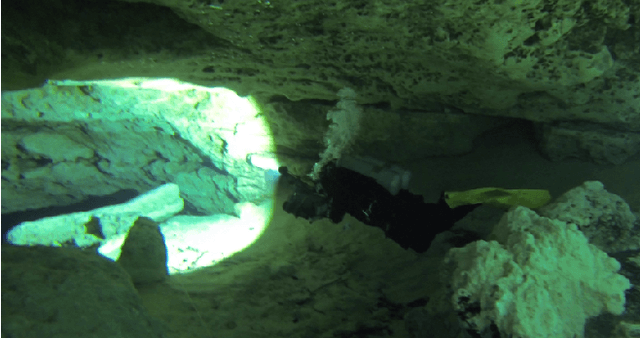
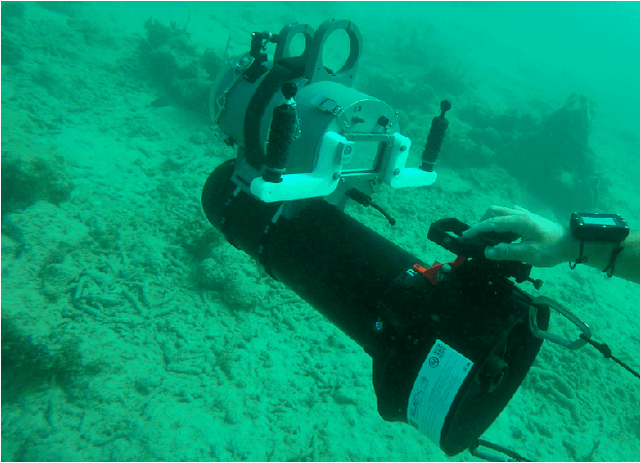
Navigation underwater traditionally is done by keeping a safe distance from obstacles, resulting in "fly-overs" of the area of interest. An Autonomous Underwater Vehicle (AUV) moving through a cluttered space, such as a shipwreck, or a decorated cave is an extremely challenging problem and has not been addressed in the past. This paper proposed a novel navigation framework utilizing an enhanced version of Trajopt for fast 3D path-optimization with near-optimal guarantees for AUVs. A sampling based correction procedure ensures that the planning is not limited by local minima, enabling navigation through narrow spaces. The method is shown, both on simulation and in-pool experiments, to be fast enough to enable real-time autonomous navigation for an Aqua2 AUV with strong safety guarantees.
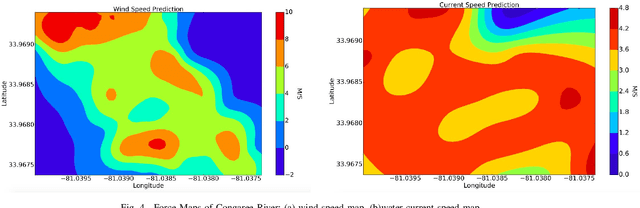
External Force Field Modeling for Autonomous Surface Vehicles
Sep 09, 2018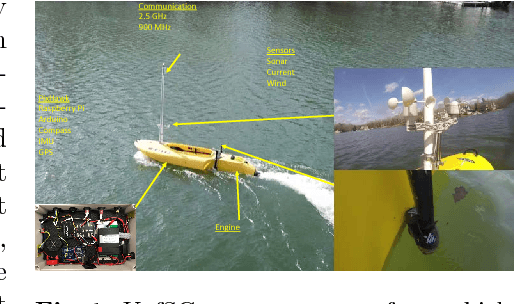
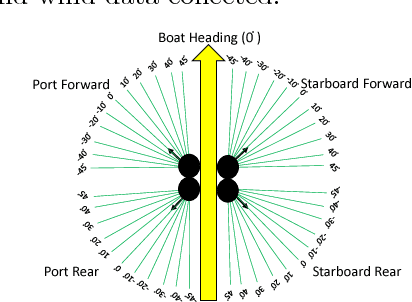
Operating in the presence of strong adverse forces is a particularly challenging problem in field robotics. In most robotic operations where the robot is not firmly grounded, such as aerial, surface, and underwater, minimal external forces are assumed as the standard operating procedures. The first action for operating in the presence of non-trivial forces is modeling the forces and their effect on the robots motion. In this work an Autonomous Surface Vehicle (ASV), operating on lakes and rivers with varying winds and currents, collects wind and current measurements with an inexpensive custom-made sensor suite setup, and generates a model of the force field. The modeling process takes into account depth, wind, and current measurements along with the ASVs trajectory from GPS. In this work, we propose a method for an ASV to build an environmental force map by integrating in a Gaussian Process the wind, depth, and current measurements gathered at the surface. We run extensive experimental field trials for our approach on real Jetyak ASVs. Experimental results from different locations validate the proposed modeling approach.