 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilization Control of the Differential Mobile Robot Using Lyapunov Function and Extended Kalman Filter
Jul 18, 2017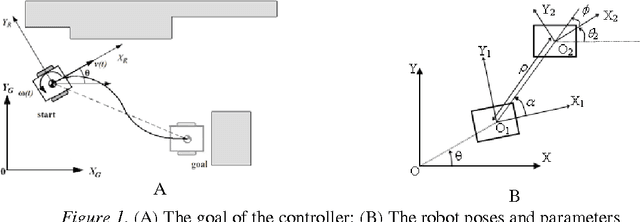
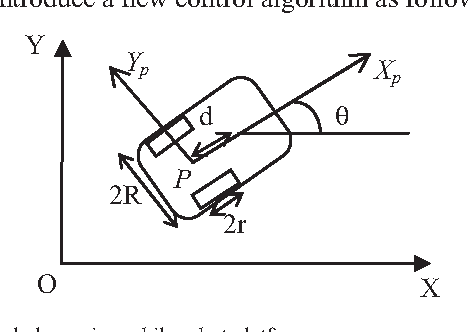
This paper presents the design of a control model to navigate the differential mobile robot to reach the desired destination from an arbitrary initial pose. The designed model is divided into two stages: the state estimation and the stabilization control. In the state estimation, an extended Kalman filter is employed to optimally combine the information from the system dynamics and measurements. Two Lyapunov functions are constructed that allow a hybrid feedback control law to execute the robot movements. The asymptotical stability and robustness of the closed loop system are assured. Simulations and experiments are carried out to validate the effectiveness and applicability of the proposed approach.
* arXiv admin note: text overlap with arXiv:1611.07112, arXiv:1611.07114
Proposal of algorithms for navigation and obstacles avoidance of autonomous mobile robot
Nov 28, 2016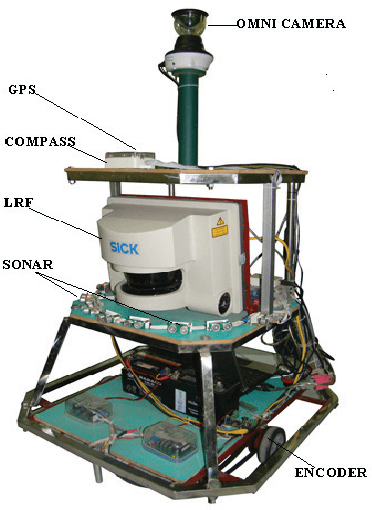
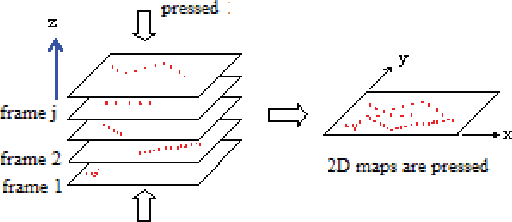
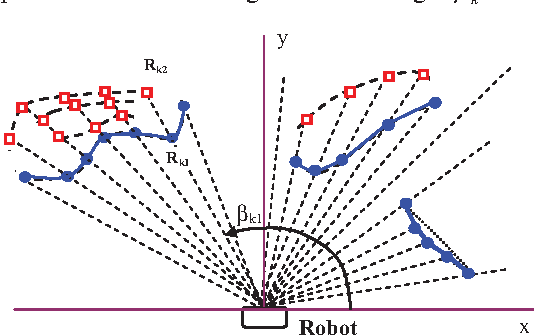
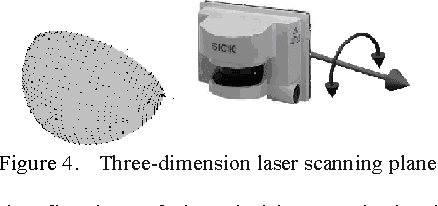
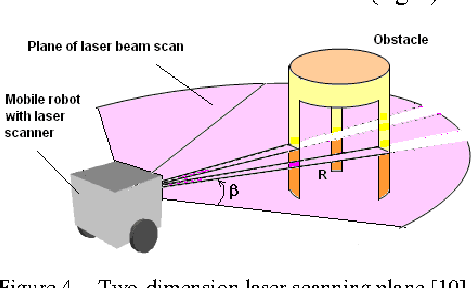
This paper presents algorithms to navigate and avoid obstacles for an in-door autonomous mobile robot. A laser range finder is used to obtain 3D images of the environment. A new algorithm, namely 3D-to-2D image pressure and barriers detection (IPaBD), is proposed to create a 2D global map from the 3D images. This map is basic to design the trajectory. A tracking controller is developed to control the robot to follow the trajectory. The obstacle avoidance is addressed with the use of sonar sensors. An improved vector field histogram (Improved-VFH) algorithm is presented with improvements to overcome some limitations of the original VFH. Experiments have been conducted and the result is encouraged.
A novel platform for internet-based mobile robot systems
Nov 28, 2016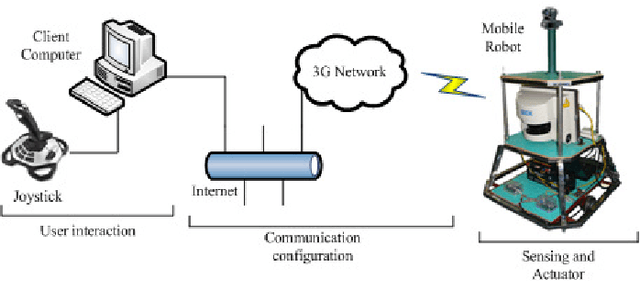
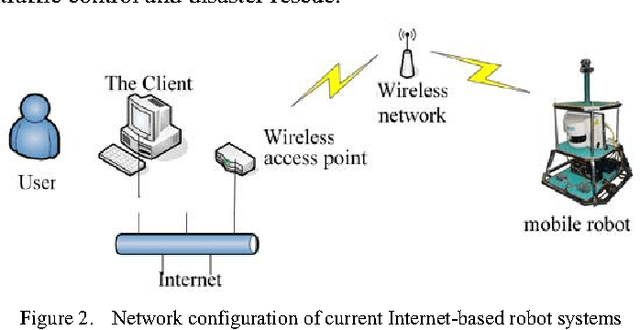
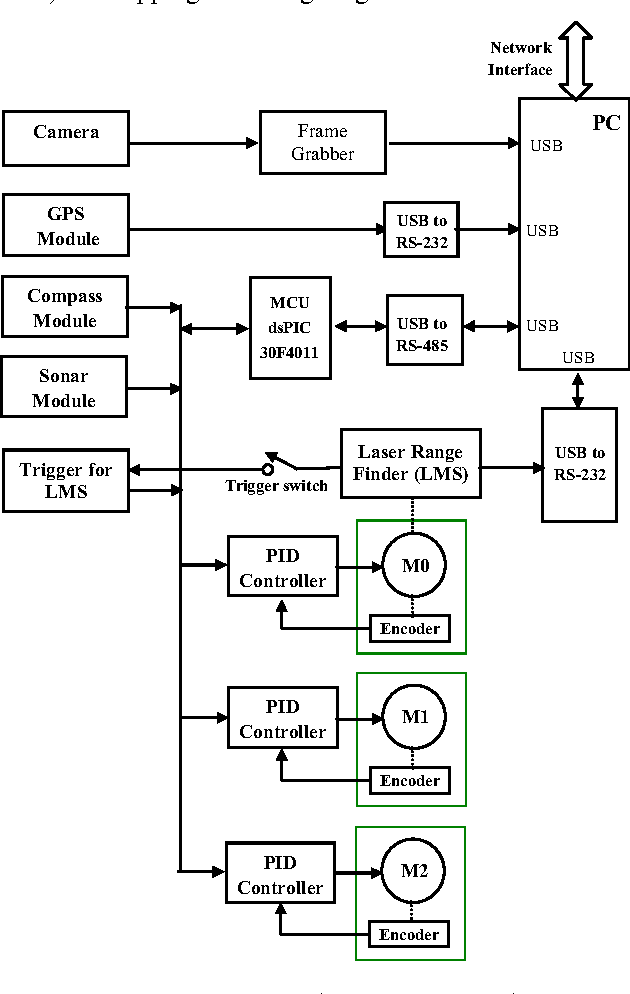
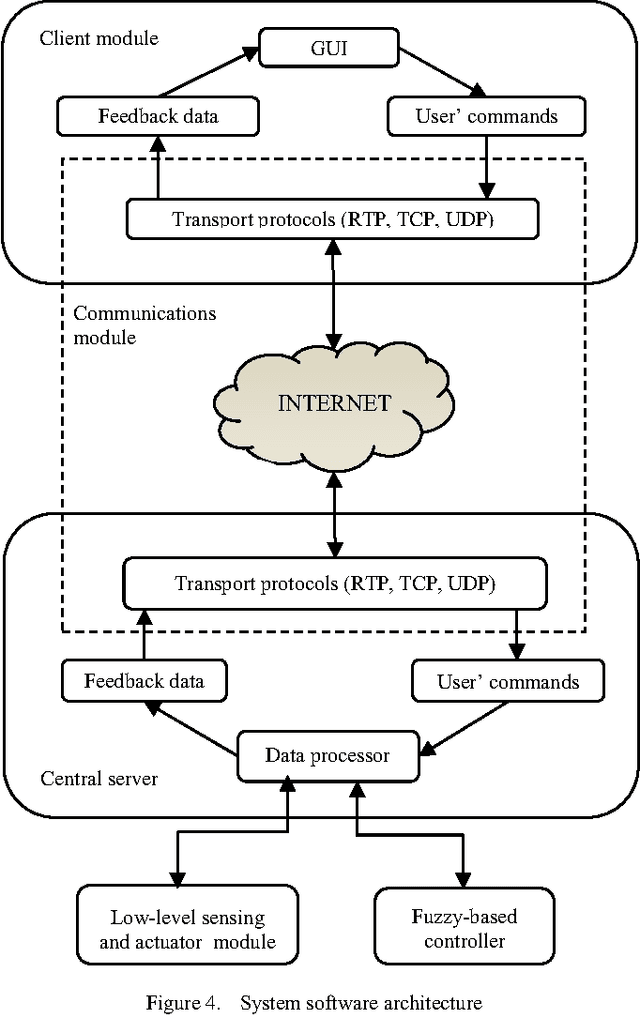
In this paper, we introduce a software and hardware structure for on-line mobile robotic systems. The hardware mainly consists of a Multi-Sensor Smart Robot connected to the Internet through 3G mobile network. The system employs a client-server software architecture in which the exchanged data between the client and the server is transmitted through different transport protocols. Autonomous mechanisms such as obstacle avoidance and safe-point achievement are implemented to ensure the robot safety. This architecture is put into operation on the real Internet and the preliminary result is promising. By adopting this structure, it will be very easy to construct an experimental platform for the research on diverse tele-operation topics such as remote control algorithms, interface designs, network protocols and applications etc.
Development of a multi-sensor perceptual system for mobile robot and EKF-based localization
Nov 28, 2016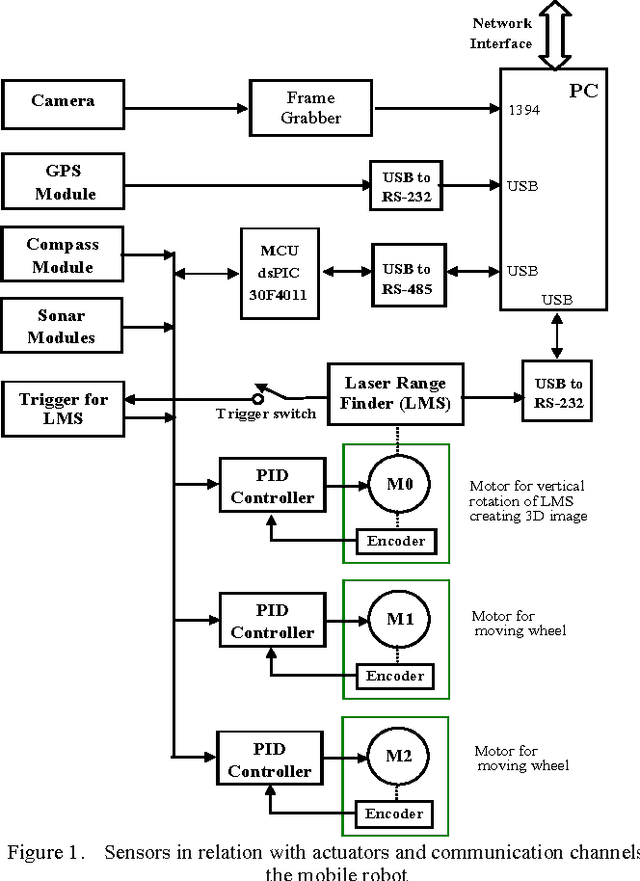
This paper presents the design and implementation of a perceptual system for the mobile robot using modern sensors and multi-point communication channels. The data extracted from the perceptual system is processed by a sensor fusion model to obtain meaningful information for the robot localization and control. Due to the uncertainties of acquiring data, an extended Kalman filter was applied to get optimal states of the system. Several experiments have been conducted and the results confirmed the functioning operation of the perceptual system and the efficiency of the Kalman filter approach.
Multi-sensor perceptual system for mobile robot and sensor fusion-based localization
Nov 22, 2016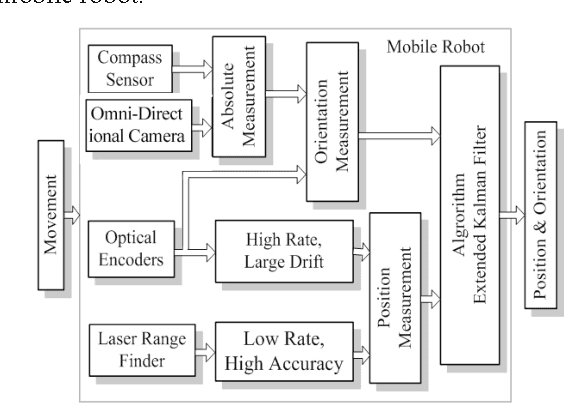
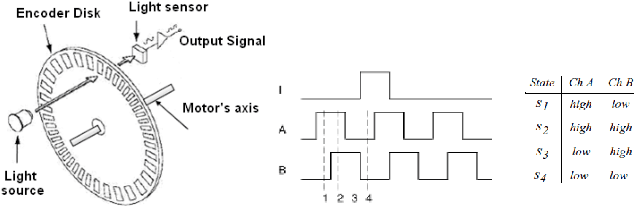
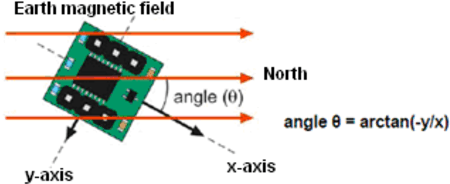
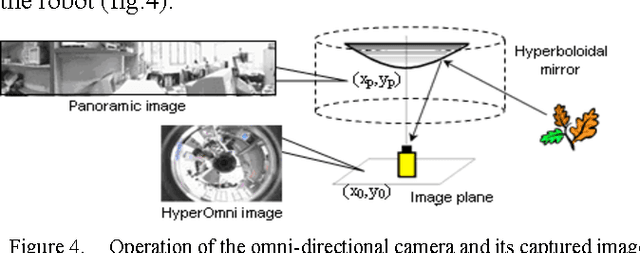
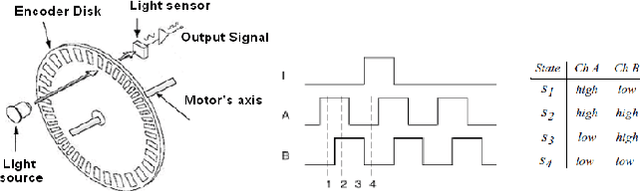
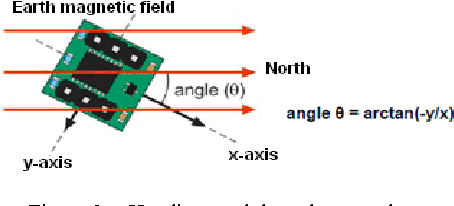
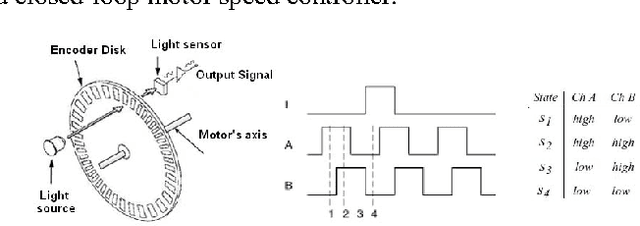
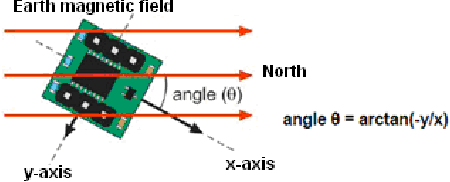
This paper presents an Extended Kalman Filter (EKF) approach to localize a mobile robot with two quadrature encoders, a compass sensor, a laser range finder (LRF) and an omni-directional camera. The prediction step is performed by employing the kinematic model of the robot as well as estimating the input noise covariance matrix as being proportional to the wheel's angular speed. At the correction step, the measurements from all sensors including incremental pulses of the encoders, line segments of the LRF, robot orientation of the compass and deflection angular of the omni-directional camera are fused. Experiments in an indoor structured environment were implemented and the good localization results prove the effectiveness and applicability of the algorithm.
Development of an EKF-based localization algorithm using compass sensor and LRF
Nov 22, 2016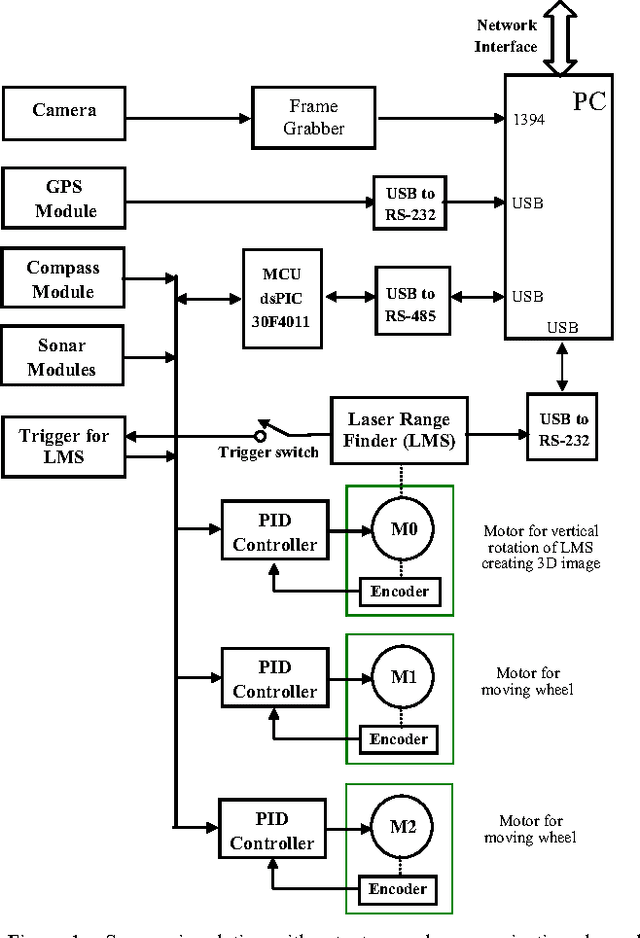
This paper presents the implementation of a perceptual system for a mobile robot. The system is designed and installed with modern sensors and multi-point communication channels. The goal is to equip the robot with a high level of perception to support a wide range of navigating applications including Internet-based telecontrol, semi-autonomy, and autonomy. Due to uncertainties of acquiring data, a sensor fusion model is developed, in which heterogeneous measured data including odometry, compass heading and laser range is combined to get an optimal estimate in a statistical sense. The combination is carried out by an extended Kalman filter. Experimental results indicate that based on the system, the robot localization is enhanced and sufficient for navigation tasks.