Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilization Control of the Differential Mobile Robot Using Lyapunov Function and Extended Kalman Filter
Paper and Code
Jul 18, 2017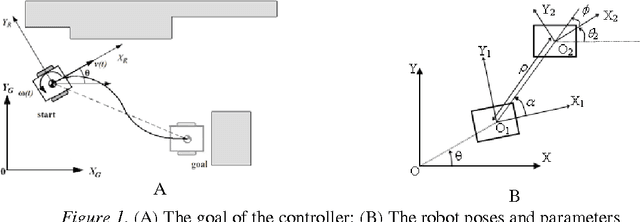
This paper presents the design of a control model to navigate the differential mobile robot to reach the desired destination from an arbitrary initial pose. The designed model is divided into two stages: the state estimation and the stabilization control. In the state estimation, an extended Kalman filter is employed to optimally combine the information from the system dynamics and measurements. Two Lyapunov functions are constructed that allow a hybrid feedback control law to execute the robot movements. The asymptotical stability and robustness of the closed loop system are assured. Simulations and experiments are carried out to validate the effectiveness and applicability of the proposed approach.
* Journal of Science and Technology, pp.441-452, Vol. 50 no.4, 2012 * arXiv admin note: text overlap with arXiv:1611.07112,
arXiv:1611.07114
View paper on