 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvidential Trust-Aware Model Personalization in Decentralized Federated Learning for Wearable IoT
Dec 22, 2025Decentralized federated learning (DFL) enables collaborative model training across edge devices without centralized coordination, offering resilience against single points of failure. However, statistical heterogeneity arising from non-identically distributed local data creates a fundamental challenge: nodes must learn personalized models adapted to their local distributions while selectively collaborating with compatible peers. Existing approaches either enforce a single global model that fits no one well, or rely on heuristic peer selection mechanisms that cannot distinguish between peers with genuinely incompatible data distributions and those with valuable complementary knowledge. We present Murmura, a framework that leverages evidential deep learning to enable trust-aware model personalization in DFL. Our key insight is that epistemic uncertainty from Dirichlet-based evidential models directly indicates peer compatibility: high epistemic uncertainty when a peer's model evaluates local data reveals distributional mismatch, enabling nodes to exclude incompatible influence while maintaining personalized models through selective collaboration. Murmura introduces a trust-aware aggregation mechanism that computes peer compatibility scores through cross-evaluation on local validation samples and personalizes model aggregation based on evidential trust with adaptive thresholds. Evaluation on three wearable IoT datasets (UCI HAR, PAMAP2, PPG-DaLiA) demonstrates that Murmura reduces performance degradation from IID to non-IID conditions compared to baseline (0.9% vs. 19.3%), achieves 7.4$\times$ faster convergence, and maintains stable accuracy across hyperparameter choices. These results establish evidential uncertainty as a principled foundation for compatibility-aware personalization in decentralized heterogeneous environments.
SketchGuard: Scaling Byzantine-Robust Decentralized Federated Learning via Sketch-Based Screening
Oct 09, 2025Decentralized Federated Learning (DFL) enables privacy-preserving collaborative training without centralized servers, but remains vulnerable to Byzantine attacks where malicious clients submit corrupted model updates. Existing Byzantine-robust DFL defenses rely on similarity-based neighbor screening that requires every client to exchange and compare complete high-dimensional model vectors with all neighbors in each training round, creating prohibitive communication and computational costs that prevent deployment at web scale. We propose SketchGuard, a general framework that decouples Byzantine filtering from model aggregation through sketch-based neighbor screening. SketchGuard compresses $d$-dimensional models to $k$-dimensional sketches ($k \ll d$) using Count Sketch for similarity comparisons, then selectively fetches full models only from accepted neighbors, reducing per-round communication complexity from $O(d|N_i|)$ to $O(k|N_i| + d|S_i|)$, where $|N_i|$ is the neighbor count and $|S_i| \le |N_i|$ is the accepted neighbor count. We establish rigorous convergence guarantees in both strongly convex and non-convex settings, proving that Count Sketch compression preserves Byzantine resilience with controlled degradation bounds where approximation errors introduce only a $(1+O(\epsilon))$ factor in the effective threshold parameter. Comprehensive experiments across multiple datasets, network topologies, and attack scenarios demonstrate that SketchGuard maintains identical robustness to state-of-the-art methods while reducing computation time by up to 82% and communication overhead by 50-70% depending on filtering effectiveness, with benefits scaling multiplicatively with model dimensionality and network connectivity. These results establish the viability of sketch-based compression as a fundamental enabler of robust DFL at web scale.
Network Structures as an Attack Surface: Topology-Based Privacy Leakage in Federated Learning
Jun 24, 2025Federated learning systems increasingly rely on diverse network topologies to address scalability and organizational constraints. While existing privacy research focuses on gradient-based attacks, the privacy implications of network topology knowledge remain critically understudied. We conduct the first comprehensive analysis of topology-based privacy leakage across realistic adversarial knowledge scenarios, demonstrating that adversaries with varying degrees of structural knowledge can infer sensitive data distribution patterns even under strong differential privacy guarantees. Through systematic evaluation of 4,720 attack instances, we analyze six distinct adversarial knowledge scenarios: complete topology knowledge and five partial knowledge configurations reflecting real-world deployment constraints. We propose three complementary attack vectors: communication pattern analysis, parameter magnitude profiling, and structural position correlation, achieving success rates of 84.1%, 65.0%, and 47.2% under complete knowledge conditions. Critically, we find that 80% of realistic partial knowledge scenarios maintain attack effectiveness above security thresholds, with certain partial knowledge configurations achieving performance superior to the baseline complete knowledge scenario. To address these vulnerabilities, we propose and empirically validate structural noise injection as a complementary defense mechanism across 808 configurations, demonstrating up to 51.4% additional attack reduction when properly layered with existing privacy techniques. These results establish that network topology represents a fundamental privacy vulnerability in federated learning systems while providing practical pathways for mitigation through topology-aware defense mechanisms.
Intermittent Deployment for Large-Scale Multi-Robot Forage Perception: Data Synthesis, Prediction, and Planning
Dec 16, 2021
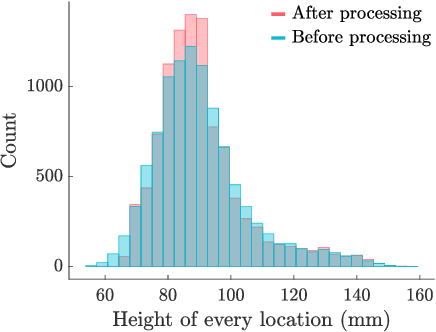
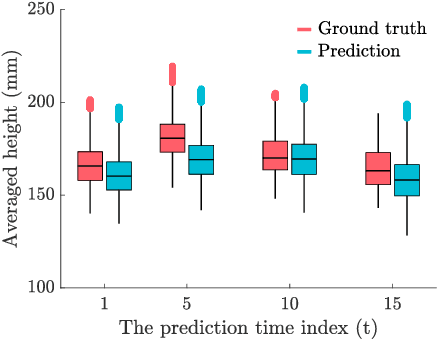
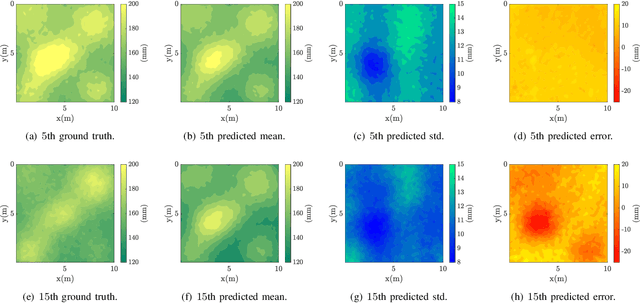
Monitoring the health and vigor of grasslands is vital for informing management decisions to optimize rotational grazing in agriculture applications. To take advantage of forage resources and improve land productivity, we require knowledge of pastureland growth patterns that is simply unavailable at state of the art. In this paper, we propose to deploy a team of robots to monitor the evolution of an unknown pastureland environment to fulfill the above goal. To monitor such an environment, which usually evolves slowly, we need to design a strategy for rapid assessment of the environment over large areas at a low cost. Thus, we propose an integrated pipeline comprising of data synthesis, deep neural network training and prediction along with a multi-robot deployment algorithm that monitors pasturelands intermittently. Specifically, using expert-informed agricultural data coupled with novel data synthesis in ROS Gazebo, we first propose a new neural network architecture to learn the spatiotemporal dynamics of the environment. Such predictions help us to understand pastureland growth patterns on large scales and make appropriate monitoring decisions for the future. Based on our predictions, we then design an intermittent multi-robot deployment policy for low-cost monitoring. Finally, we compare the proposed pipeline with other methods, from data synthesis to prediction and planning, to corroborate our pipeline's performance.