 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRTSeg: Real-time Semantic Segmentation Comparative Study
Jun 10, 2018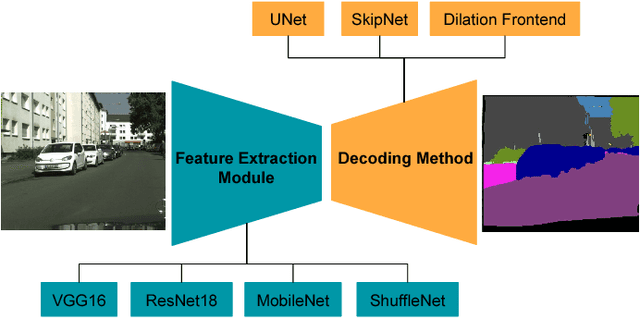
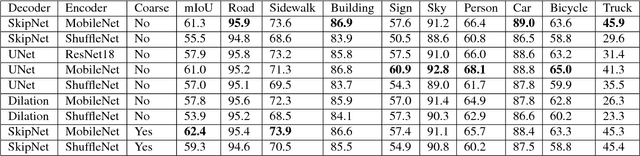
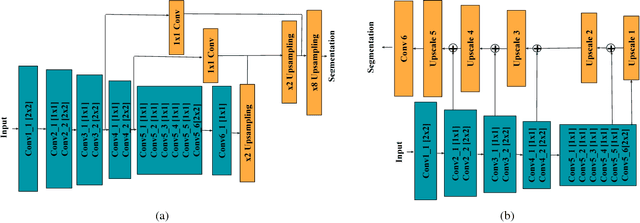
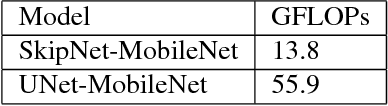
Semantic segmentation benefits robotics related applications especially autonomous driving. Most of the research on semantic segmentation is only on increasing the accuracy of segmentation models with little attention to computationally efficient solutions. The few work conducted in this direction does not provide principled methods to evaluate the different design choices for segmentation. In this paper, we address this gap by presenting a real-time semantic segmentation benchmarking framework with a decoupled design for feature extraction and decoding methods. The framework is comprised of different network architectures for feature extraction such as VGG16, Resnet18, MobileNet, and ShuffleNet. It is also comprised of multiple meta-architectures for segmentation that define the decoding methodology. These include SkipNet, UNet, and Dilation Frontend. Experimental results are presented on the Cityscapes dataset for urban scenes. The modular design allows novel architectures to emerge, that lead to 143x GFLOPs reduction in comparison to SegNet. This benchmarking framework is publicly available at "https://github.com/MSiam/TFSegmentation".
ShuffleSeg: Real-time Semantic Segmentation Network
Mar 15, 2018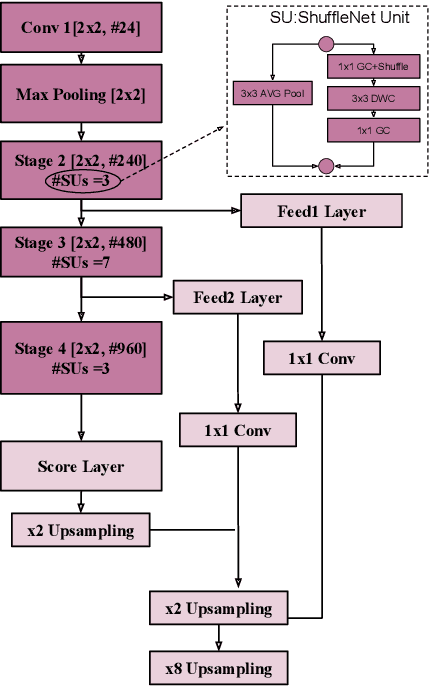

Real-time semantic segmentation is of significant importance for mobile and robotics related applications. We propose a computationally efficient segmentation network which we term as ShuffleSeg. The proposed architecture is based on grouped convolution and channel shuffling in its encoder for improving the performance. An ablation study of different decoding methods is compared including Skip architecture, UNet, and Dilation Frontend. Interesting insights on the speed and accuracy tradeoff is discussed. It is shown that skip architecture in the decoding method provides the best compromise for the goal of real-time performance, while it provides adequate accuracy by utilizing higher resolution feature maps for a more accurate segmentation. ShuffleSeg is evaluated on CityScapes and compared against the state of the art real-time segmentation networks. It achieves 2x GFLOPs reduction, while it provides on par mean intersection over union of 58.3% on CityScapes test set. ShuffleSeg runs at 15.7 frames per second on NVIDIA Jetson TX2, which makes it of great potential for real-time applications.