 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Evaluating Large Language Models Trained on Code
Jul 14, 2021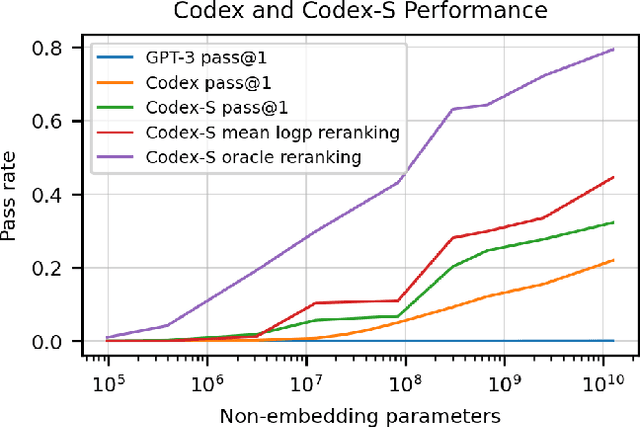
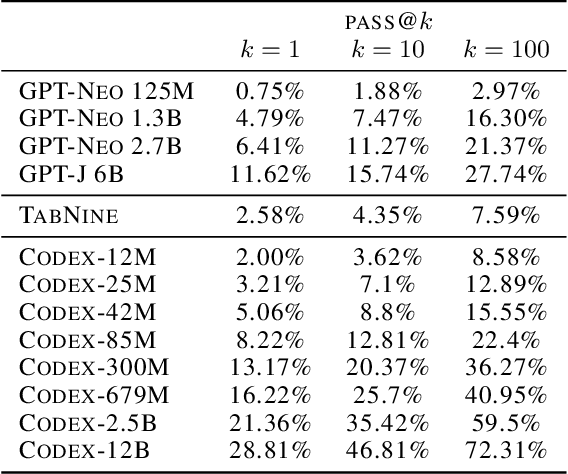
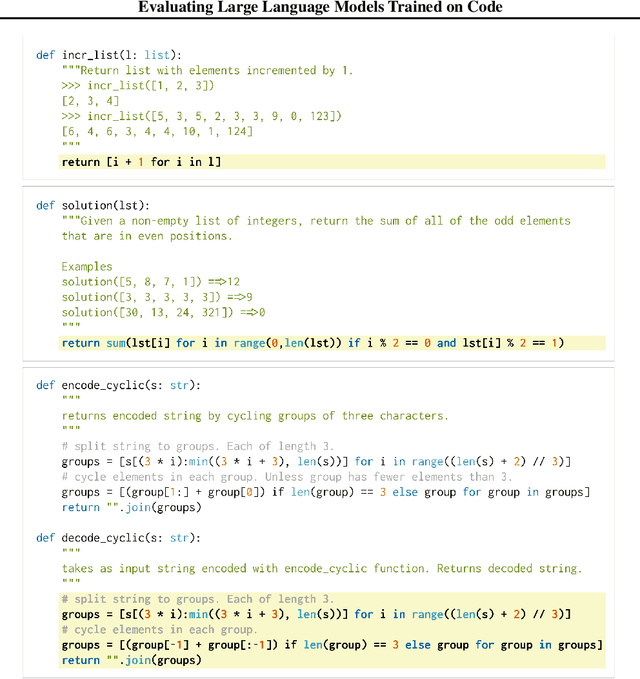
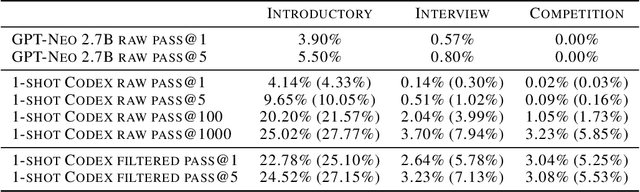
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
Zero-Shot Text-to-Image Generation
Feb 26, 2021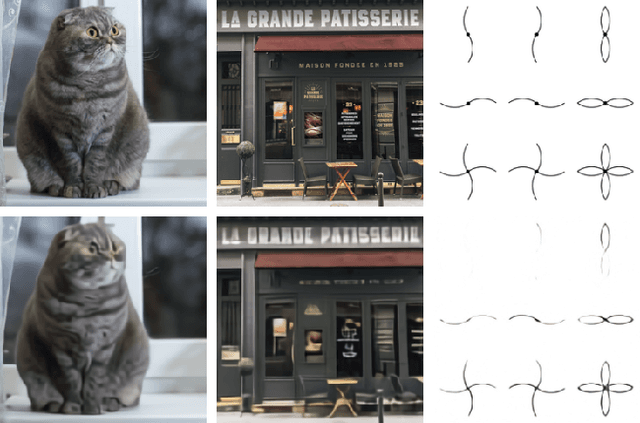
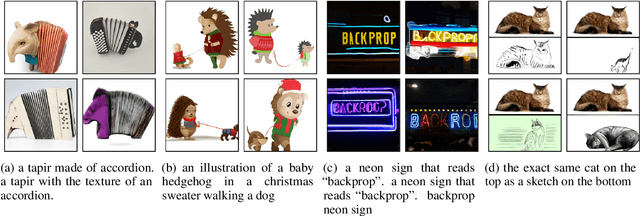

Text-to-image generation has traditionally focused on finding better modeling assumptions for training on a fixed dataset. These assumptions might involve complex architectures, auxiliary losses, or side information such as object part labels or segmentation masks supplied during training. We describe a simple approach for this task based on a transformer that autoregressively models the text and image tokens as a single stream of data. With sufficient data and scale, our approach is competitive with previous domain-specific models when evaluated in a zero-shot fashion.
Learning to Run challenge solutions: Adapting reinforcement learning methods for neuromusculoskeletal environments
Apr 02, 2018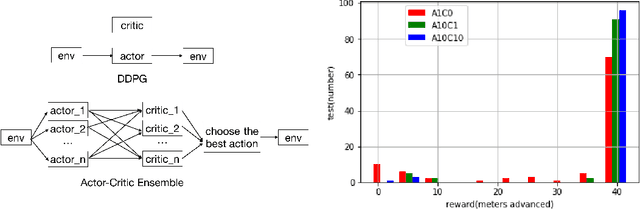
In the NIPS 2017 Learning to Run challenge, participants were tasked with building a controller for a musculoskeletal model to make it run as fast as possible through an obstacle course. Top participants were invited to describe their algorithms. In this work, we present eight solutions that used deep reinforcement learning approaches, based on algorithms such as Deep Deterministic Policy Gradient, Proximal Policy Optimization, and Trust Region Policy Optimization. Many solutions use similar relaxations and heuristics, such as reward shaping, frame skipping, discretization of the action space, symmetry, and policy blending. However, each of the eight teams implemented different modifications of the known algorithms.
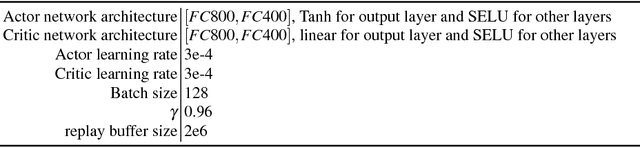
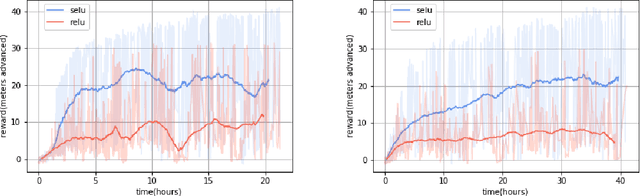
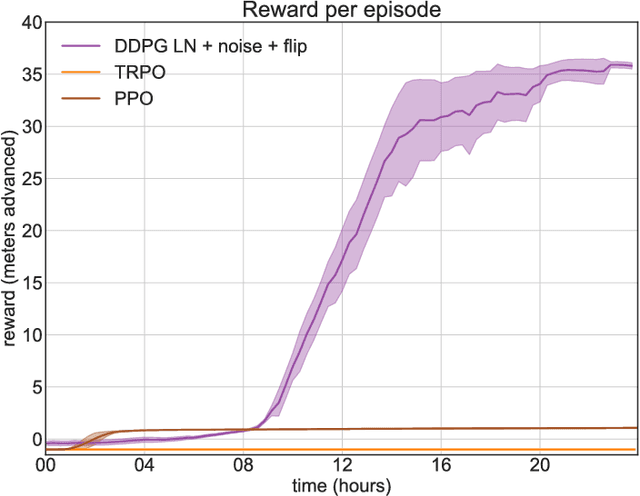
Run, skeleton, run: skeletal model in a physics-based simulation
Jan 28, 2018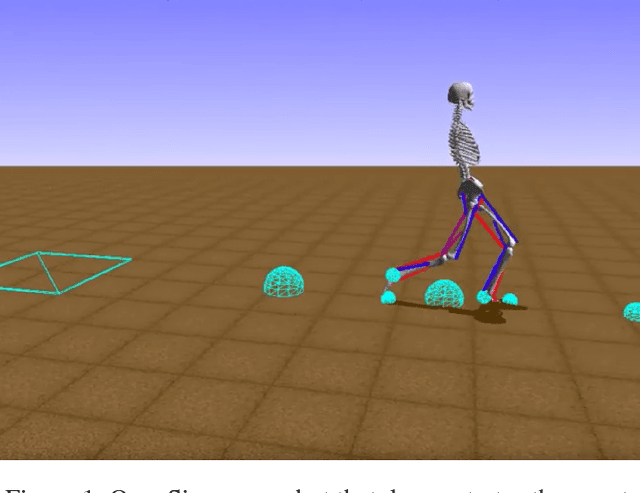
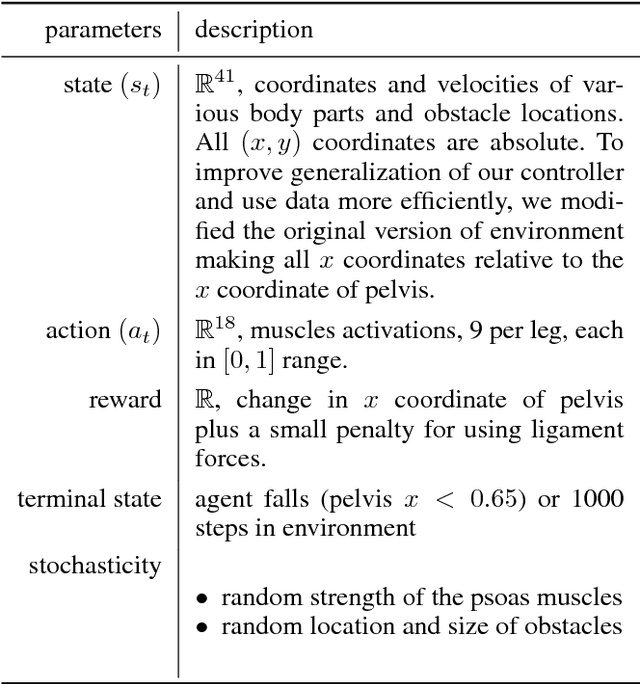
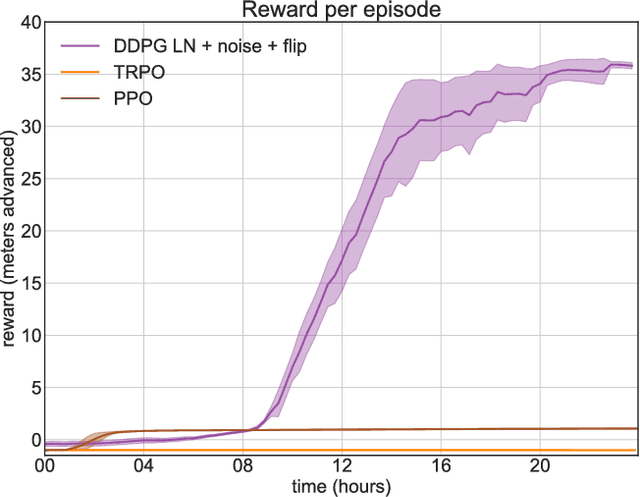
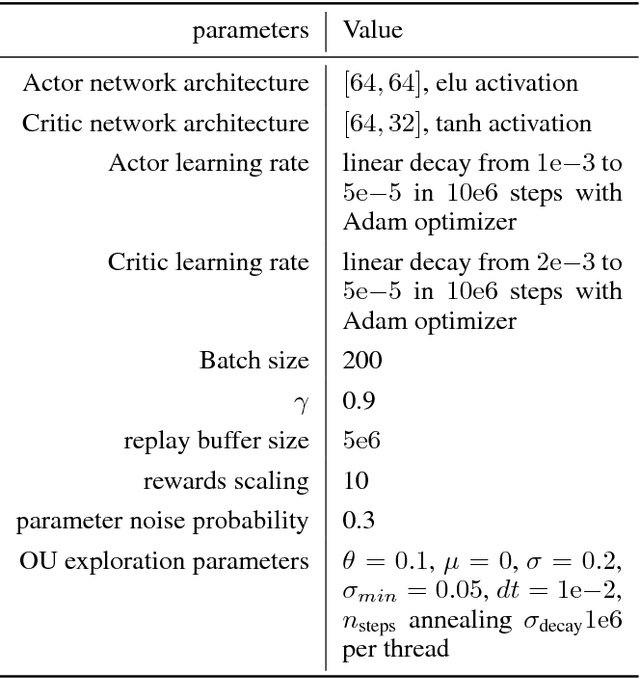
In this paper, we present our approach to solve a physics-based reinforcement learning challenge "Learning to Run" with objective to train physiologically-based human model to navigate a complex obstacle course as quickly as possible. The environment is computationally expensive, has a high-dimensional continuous action space and is stochastic. We benchmark state of the art policy-gradient methods and test several improvements, such as layer normalization, parameter noise, action and state reflecting, to stabilize training and improve its sample-efficiency. We found that the Deep Deterministic Policy Gradient method is the most efficient method for this environment and the improvements we have introduced help to stabilize training. Learned models are able to generalize to new physical scenarios, e.g. different obstacle courses.
Deep Attention Recurrent Q-Network
Dec 05, 2015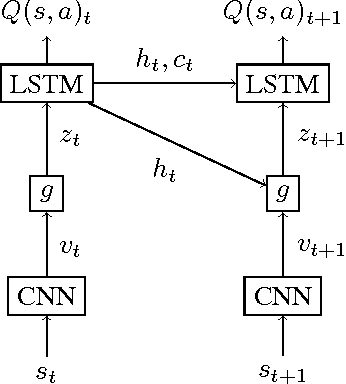
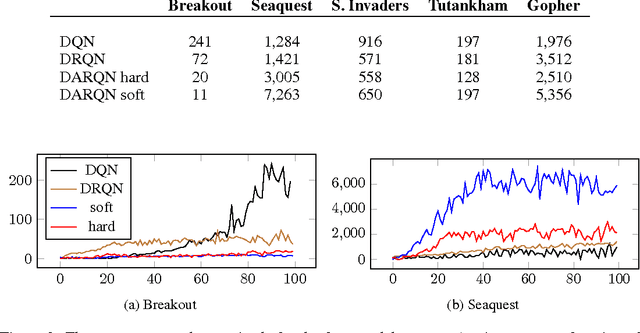

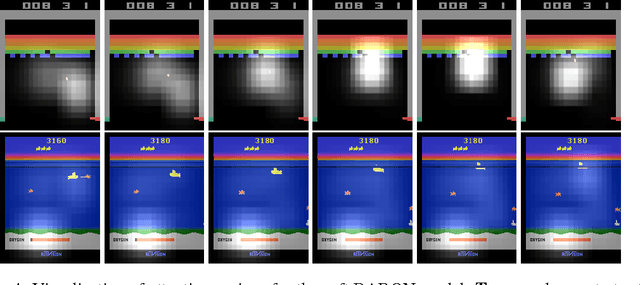
A deep learning approach to reinforcement learning led to a general learner able to train on visual input to play a variety of arcade games at the human and superhuman levels. Its creators at the Google DeepMind's team called the approach: Deep Q-Network (DQN). We present an extension of DQN by "soft" and "hard" attention mechanisms. Tests of the proposed Deep Attention Recurrent Q-Network (DARQN) algorithm on multiple Atari 2600 games show level of performance superior to that of DQN. Moreover, built-in attention mechanisms allow a direct online monitoring of the training process by highlighting the regions of the game screen the agent is focusing on when making decisions.