 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Differentiable Newton Euler Algorithm for Multi-body Model Learning
Oct 19, 2020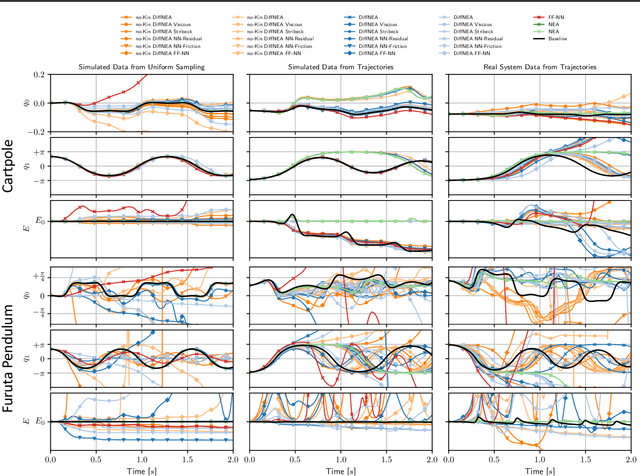
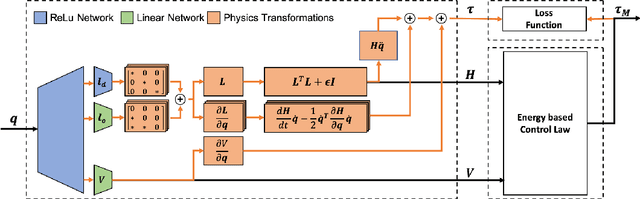
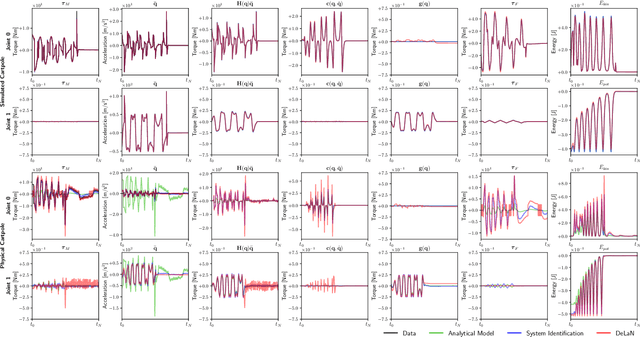
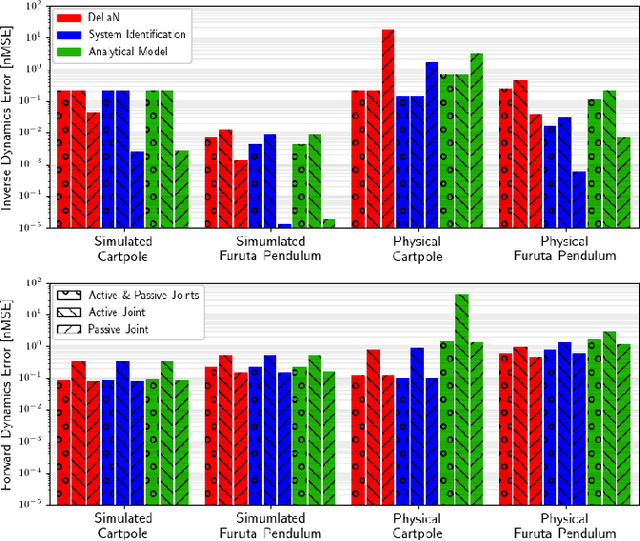
In this work, we examine a spectrum of hybrid model for the domain of multi-body robot dynamics. We motivate a computation graph architecture that embodies the Newton Euler equations, emphasizing the utility of the Lie Algebra form in translating the dynamical geometry into an efficient computational structure for learning. We describe the used virtual parameters that enable unconstrained physical plausible dynamics and the used actuator models. In the experiments, we define a family of 26 grey-box models and evaluate them for system identification of the simulated and physical Furuta Pendulum and Cartpole. The comparison shows that the kinematic parameters, required by previous white-box system identification methods, can be accurately inferred from data. Furthermore, we highlight that models with guaranteed bounded energy of the uncontrolled system generate non-divergent trajectories, while more general models have no such guarantee, so their performance strongly depends on the data distribution. Therefore, the main contributions of this work is the introduction of a white-box model that jointly learns dynamic and kinematics parameters and can be combined with black-box components. We then provide extensive empirical evaluation on challenging systems and different datasets that elucidates the comparative performance of our grey-box architecture with comparable white- and black-box models.
HJB Optimal Feedback Control with Deep Differential Value Functions and Action Constraints
Oct 11, 2019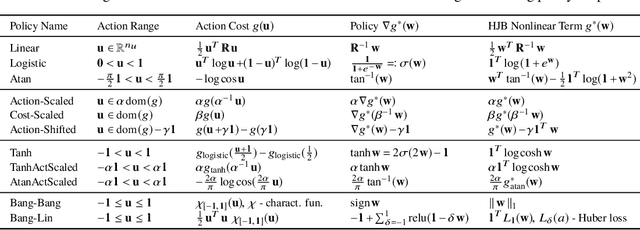

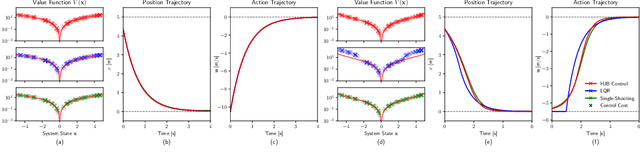
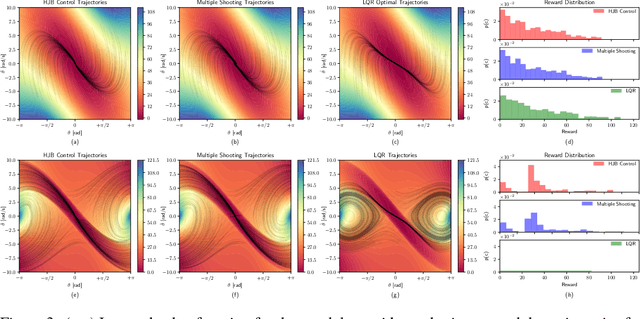
Learning optimal feedback control laws capable of executing optimal trajectories is essential for many robotic applications. Such policies can be learned using reinforcement learning or planned using optimal control. While reinforcement learning is sample inefficient, optimal control only plans an optimal trajectory from a specific starting configuration. In this paper we propose deep optimal feedback control to learn an optimal feedback policy rather than a single trajectory. By exploiting the inherent structure of the robot dynamics and strictly convex action cost, we can derive principled cost functions such that the optimal policy naturally obeys the action limits, is globally optimal and stable on the training domain given the optimal value function. The corresponding optimal value function is learned end-to-end by embedding a deep differential network in the Hamilton-Jacobi-Bellmann differential equation and minimizing the error of this equality while simultaneously decreasing the discounting from short- to far-sighted to enable the learning. Our proposed approach enables us to learn an optimal feedback control law in continuous time, that in contrast to existing approaches generates an optimal trajectory from any point in state-space without the need of replanning. The resulting approach is evaluated on non-linear systems and achieves optimal feedback control, where standard optimal control methods require frequent replanning.
Deep Lagrangian Networks for end-to-end learning of energy-based control for under-actuated systems
Aug 03, 2019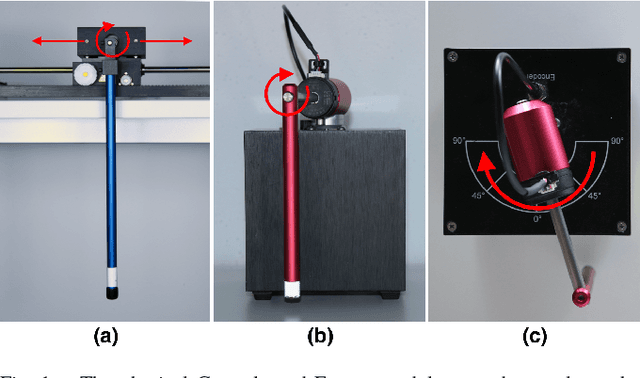
Applying Deep Learning to control has a lot of potential for enabling the intelligent design of robot control laws. Unfortunately common deep learning approaches to control, such as deep reinforcement learning, require an unrealistic amount of interaction with the real system, do not yield any performance guarantees, and do not make good use of extensive insights from model-based control. In particular, common black-box approaches -- that abandon all insight from control -- are not suitable for complex robot systems. We propose a deep control approach as a bridge between the solid theoretical foundations of energy-based control and the flexibility of deep learning. To accomplish this goal, we extend Deep Lagrangian Networks (DeLaN) to not only adhere to Lagrangian Mechanics but also ensure conservation of energy and passivity of the learned representation. This novel extension is embedded within generic model-based control laws to enable energy control of under-actuated systems. The resulting DeLaN for energy control (DeLaN 4EC) is the first model learning approach using generic function approximation that is capable of learning energy control. DeLaN 4EC exhibits excellent real-time control on the physical Furuta Pendulum and learns to swing-up the pendulum while the control law using system identification does not.
Deep Lagrangian Networks: Using Physics as Model Prior for Deep Learning
Jul 10, 2019



Deep learning has achieved astonishing results on many tasks with large amounts of data and generalization within the proximity of training data. For many important real-world applications, these requirements are unfeasible and additional prior knowledge on the task domain is required to overcome the resulting problems. In particular, learning physics models for model-based control requires robust extrapolation from fewer samples - often collected online in real-time - and model errors may lead to drastic damages of the system. Directly incorporating physical insight has enabled us to obtain a novel deep model learning approach that extrapolates well while requiring fewer samples. As a first example, we propose Deep Lagrangian Networks (DeLaN) as a deep network structure upon which Lagrangian Mechanics have been imposed. DeLaN can learn the equations of motion of a mechanical system (i.e., system dynamics) with a deep network efficiently while ensuring physical plausibility. The resulting DeLaN network performs very well at robot tracking control. The proposed method did not only outperform previous model learning approaches at learning speed but exhibits substantially improved and more robust extrapolation to novel trajectories and learns online in real-time