 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Share or Not to Share? Performance Guarantees and the Asymmetric Nature of Cross-Robot Experience Transfer
Jun 29, 2020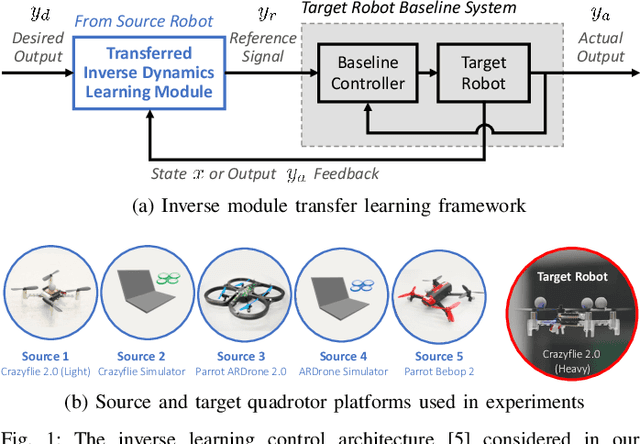
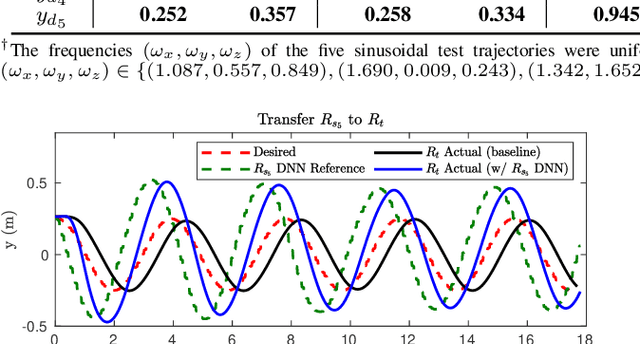
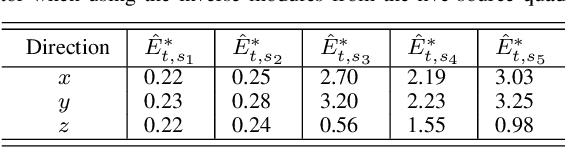

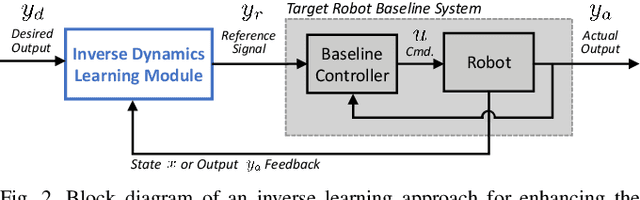
In the robotics literature, experience transfer has been proposed in different learning-based control frameworks to minimize the costs and risks associated with training robots. While various works have shown the feasibility of transferring prior experience from a source robot to improve or accelerate the learning of a target robot, there are usually no guarantees that experience transfer improves the performance of the target robot. In practice, the efficacy of transferring experience is often not known until it is tested on physical robots. This trial-and-error approach can be extremely unsafe and inefficient. Building on our previous work, in this paper we consider an inverse module transfer learning framework, where the inverse module of a source robot system is transferred to a target robot system to improve its tracking performance on arbitrary trajectories. We derive a theoretical bound on the tracking error when a source inverse module is transferred to the target robot and propose a Bayesian-optimization-based algorithm to estimate this bound from data. We further highlight the asymmetric nature of cross-robot experience transfer that has often been neglected in the literature. We demonstrate our approach in quadrotor experiments and show that we can guarantee positive transfer on the target robot for tracking random periodic trajectories.
Zeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020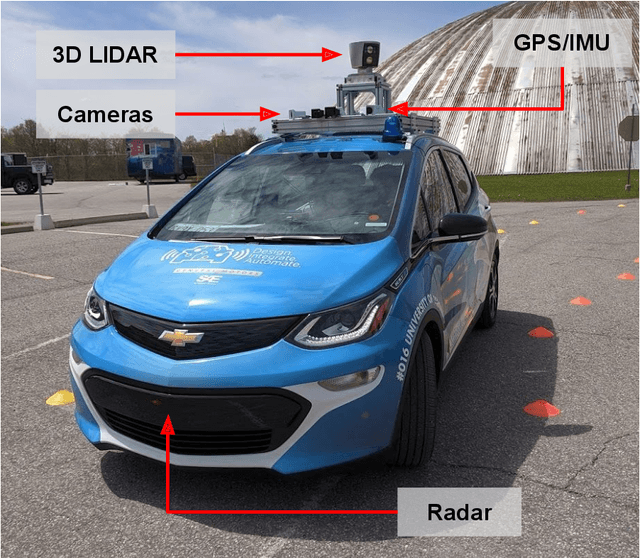
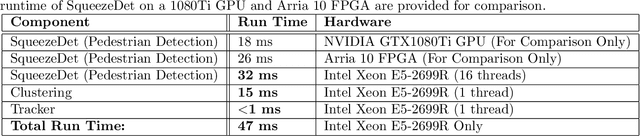
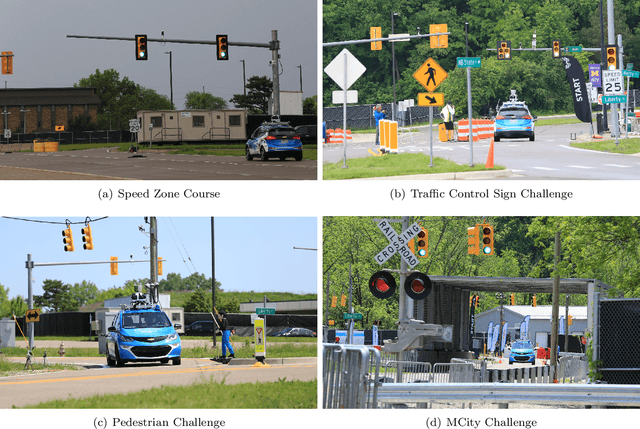
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.
Experience Selection Using Dynamics Similarity for Efficient Multi-Source Transfer Learning Between Robots
Mar 29, 2020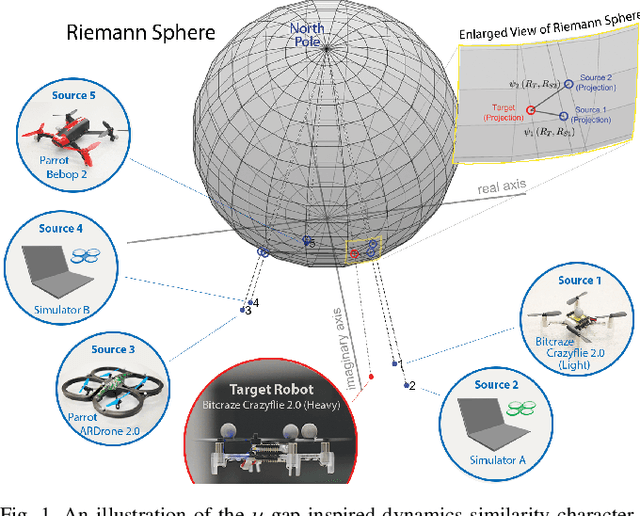
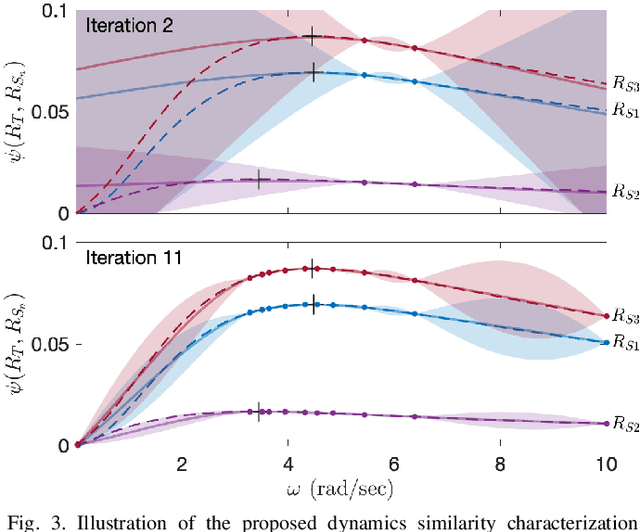
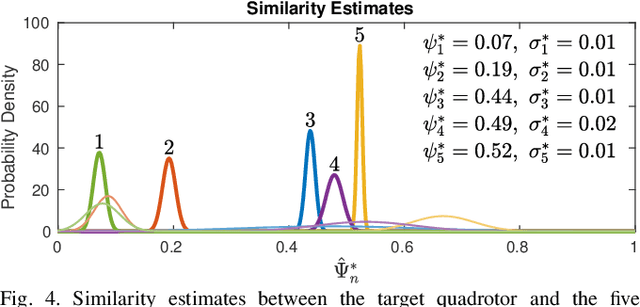
In the robotics literature, different knowledge transfer approaches have been proposed to leverage the experience from a source task or robot -- real or virtual -- to accelerate the learning process on a new task or robot. A commonly made but infrequently examined assumption is that incorporating experience from a source task or robot will be beneficial. In practice, inappropriate knowledge transfer can result in negative transfer or unsafe behaviour. In this work, inspired by a system gap metric from robust control theory, the $\nu$-gap, we present a data-efficient algorithm for estimating the similarity between pairs of robot systems. In a multi-source inter-robot transfer learning setup, we show that this similarity metric allows us to predict relative transfer performance and thus informatively select experiences from a source robot before knowledge transfer. We demonstrate our approach with quadrotor experiments, where we transfer an inverse dynamics model from a real or virtual source quadrotor to enhance the tracking performance of a target quadrotor on arbitrary hand-drawn trajectories. We show that selecting experiences based on the proposed similarity metric effectively facilitates the learning of the target quadrotor, improving performance by 62% compared to a poorly selected experience.