 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Null Space Compliance Approach for Maintaining Safety and Tracking Performance in Human-Robot Interactions
Feb 04, 2025In recent years, the focus on developing robot manipulators has shifted towards prioritizing safety in Human-Robot Interaction (HRI). Impedance control is a typical approach for interaction control in collaboration tasks. However, such a control approach has two main limitations: 1) the end-effector (EE)'s limited compliance to adapt to unknown physical interactions, and 2) inability of the robot body to compliantly adapt to unknown physical interactions. In this work, we present an approach to address these drawbacks. We introduce a modified Cartesian impedance control method combined with a Dynamical System (DS)-based motion generator, aimed at enhancing the interaction capability of the EE without compromising main task tracking performance. This approach enables human coworkers to interact with the EE on-the-fly, e.g. tool changeover, after which the robot compliantly resumes its task. Additionally, combining with a new null space impedance control method enables the robot body to exhibit compliant behaviour in response to interactions, avoiding serious injuries from accidental contact while mitigating the impact on main task tracking performance. Finally, we prove the passivity of the system and validate the proposed approach through comprehensive comparative experiments on a 7 Degree-of-Freedom (DOF) KUKA LWR IV+ robot.
A Key-Driven Framework for Identity-Preserving Face Anonymization
Sep 05, 2024



Virtual faces are crucial content in the metaverse. Recently, attempts have been made to generate virtual faces for privacy protection. Nevertheless, these virtual faces either permanently remove the identifiable information or map the original identity into a virtual one, which loses the original identity forever. In this study, we first attempt to address the conflict between privacy and identifiability in virtual faces, where a key-driven face anonymization and authentication recognition (KFAAR) framework is proposed. Concretely, the KFAAR framework consists of a head posture-preserving virtual face generation (HPVFG) module and a key-controllable virtual face authentication (KVFA) module. The HPVFG module uses a user key to project the latent vector of the original face into a virtual one. Then it maps the virtual vectors to obtain an extended encoding, based on which the virtual face is generated. By simultaneously adding a head posture and facial expression correction module, the virtual face has the same head posture and facial expression as the original face. During the authentication, we propose a KVFA module to directly recognize the virtual faces using the correct user key, which can obtain the original identity without exposing the original face image. We also propose a multi-task learning objective to train HPVFG and KVFA. Extensive experiments demonstrate the advantages of the proposed HPVFG and KVFA modules, which effectively achieve both facial anonymity and identifiability.
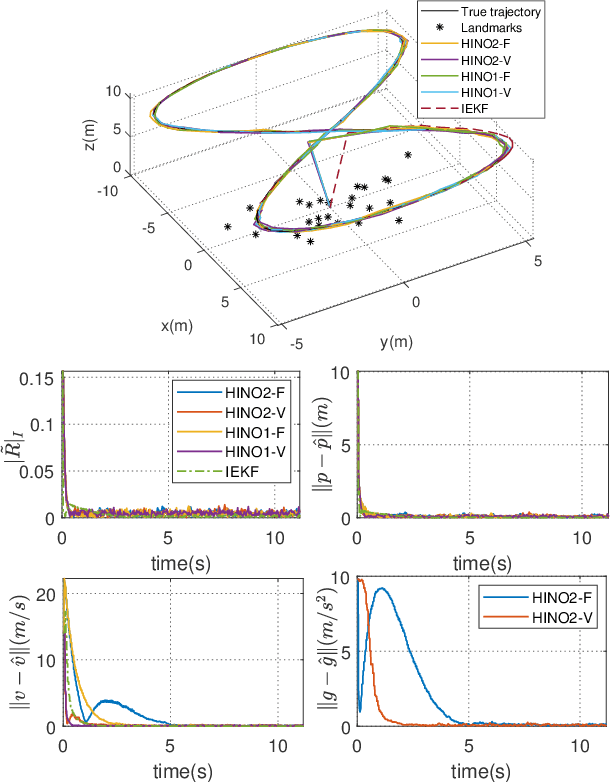
Pose, Velocity and Landmark Position Estimation Using IMU and Bearing Measurements
Jul 25, 2024


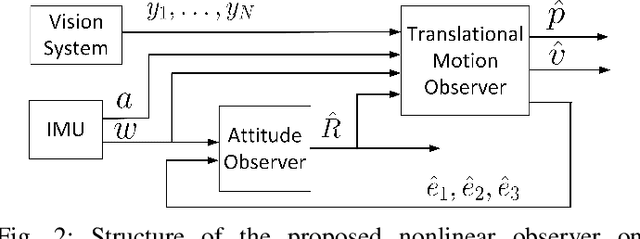
This paper investigates the estimation problem of the pose (orientation and position) and linear velocity of a rigid body, as well as the landmark positions, using an inertial measurement unit (IMU) and a monocular camera. First, we propose a globally exponentially stable (GES) linear time-varying (LTV) observer for the estimation of body-frame landmark positions and velocity, using IMU and monocular bearing measurements. Thereafter, using the gyro measurements, some landmarks known in the inertial frame and the estimates from the LTV observer, we propose a nonlinear pose observer on $\SO(3)\times \mathbb{R}^3$. The overall estimation system is shown to be almost globally asymptotically stable (AGAS) using the notion of almost global input-to-state stability (ISS). Interestingly, we show that with the knowledge (in the inertial frame) of a small number of landmarks, we can recover (under some conditions) the unknown positions (in the inertial frame) of a large number of landmarks. Numerical simulation results are presented to illustrate the performance of the proposed estimation scheme.
Punctate White Matter Lesion Segmentation in Preterm Infants Powered by Counterfactually Generative Learning
Sep 07, 2023Accurate segmentation of punctate white matter lesions (PWMLs) are fundamental for the timely diagnosis and treatment of related developmental disorders. Automated PWMLs segmentation from infant brain MR images is challenging, considering that the lesions are typically small and low-contrast, and the number of lesions may dramatically change across subjects. Existing learning-based methods directly apply general network architectures to this challenging task, which may fail to capture detailed positional information of PWMLs, potentially leading to severe under-segmentations. In this paper, we propose to leverage the idea of counterfactual reasoning coupled with the auxiliary task of brain tissue segmentation to learn fine-grained positional and morphological representations of PWMLs for accurate localization and segmentation. A simple and easy-to-implement deep-learning framework (i.e., DeepPWML) is accordingly designed. It combines the lesion counterfactual map with the tissue probability map to train a lightweight PWML segmentation network, demonstrating state-of-the-art performance on a real-clinical dataset of infant T1w MR images. The code is available at \href{https://github.com/ladderlab-xjtu/DeepPWML}{https://github.com/ladderlab-xjtu/DeepPWML}.
Nonlinear Attitude Estimation Using Intermittent Linear Velocity and Vector Measurements
Sep 22, 2021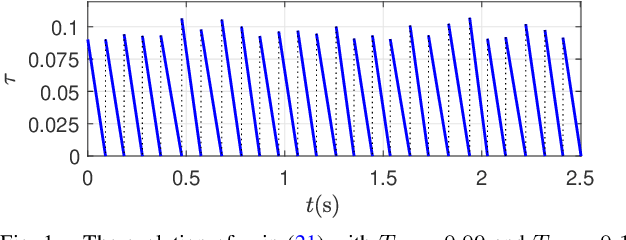
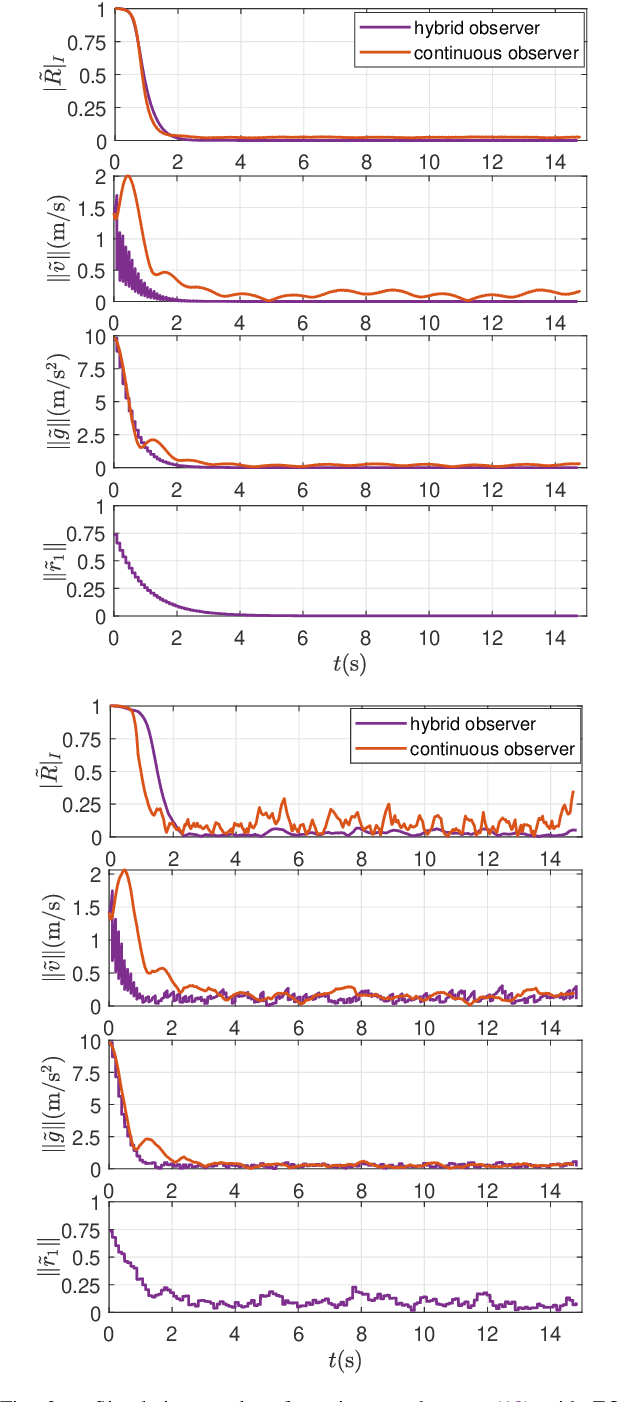
This paper investigates the problem of continuous attitude estimation on $SO(3)$ using continuous angular velocity and linear acceleration measurements as well as intermittent linear velocity and inertial vector measurements. First, we propose a nonlinear observer for the case where all the measurements are continuous and almost global asymptotic stability (AGAS) is shown using the notion of almost global input-to-state stability (ISS) on manifolds. Thereafter, a hybrid attitude observer, with AGAS guarantees, is proposed in terms of intermittent linear velocity and vector measurements. Numerical simulation results are presented to illustrate the performance of the proposed hybrid observer.
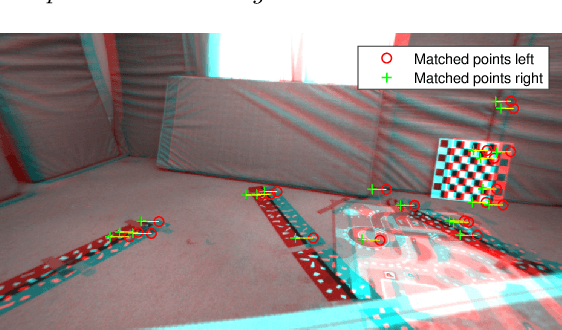
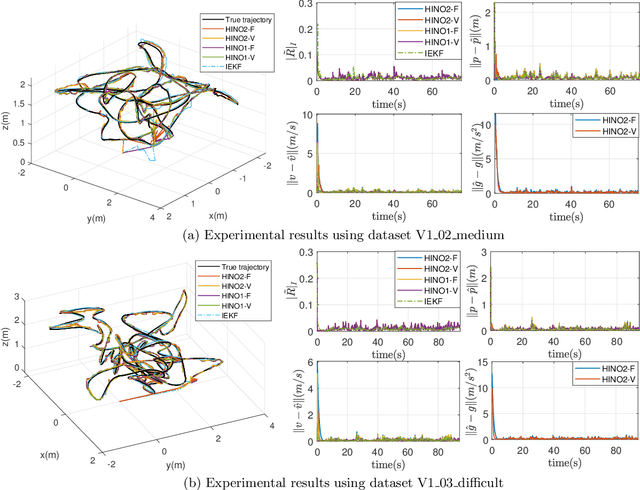
Nonlinear Observers Design for Vision-Aided Inertial Navigation Systems
Feb 09, 2021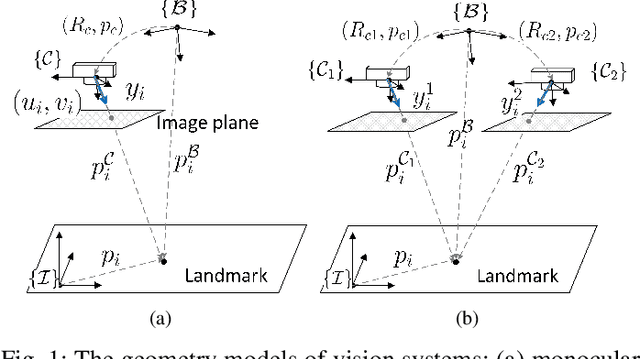
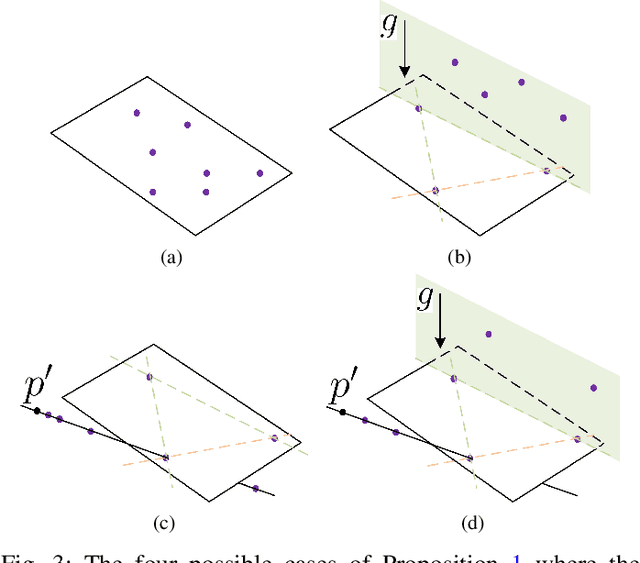
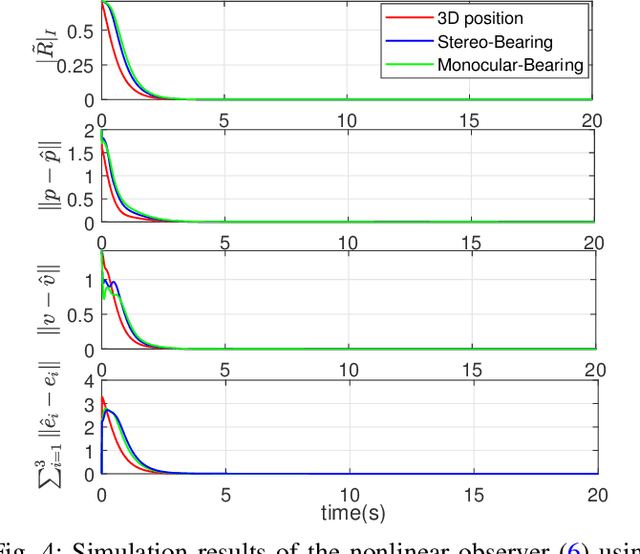
This paper deals with the simultaneous estimation of the attitude, position and linear velocity for vision-aided inertial navigation systems. We propose a nonlinear observer on $SO(3)\times \mathbb{R}^{15}$ relying on body-frame acceleration, angular velocity and (stereo or monocular) bearing measurements of some landmarks that are constant and known in the inertial frame. Unlike the existing local Kalman-type observers, our proposed nonlinear observer guarantees almost global asymptotic stability and local exponential stability. A detailed uniform observability analysis has been conducted and sufficient conditions are derived. Moreover, a hybrid version of the proposed observer is provided to handle the intermittent nature of the measurements in practical applications. Simulation and experimental results are provided to illustrate the effectiveness of the proposed state observer.
Hybrid Feedback for Global Attitude Tracking
Dec 23, 2020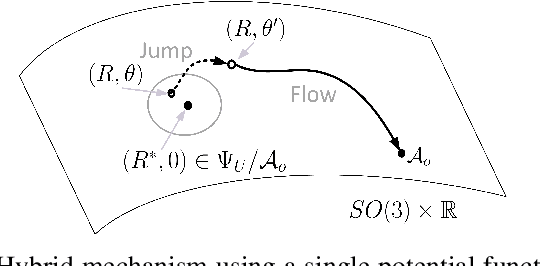
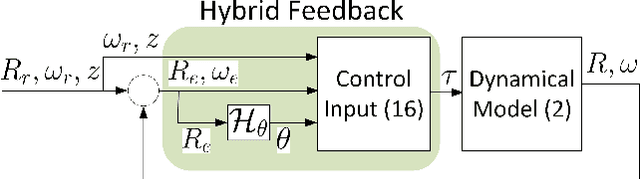
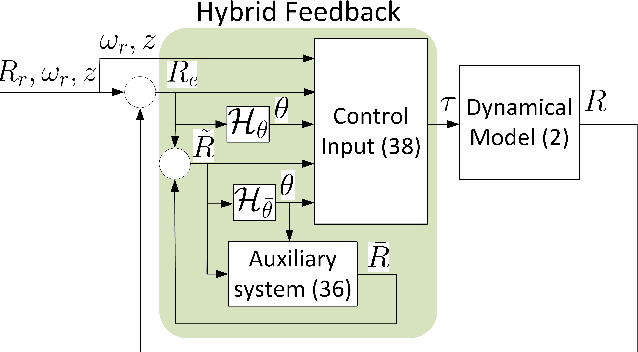
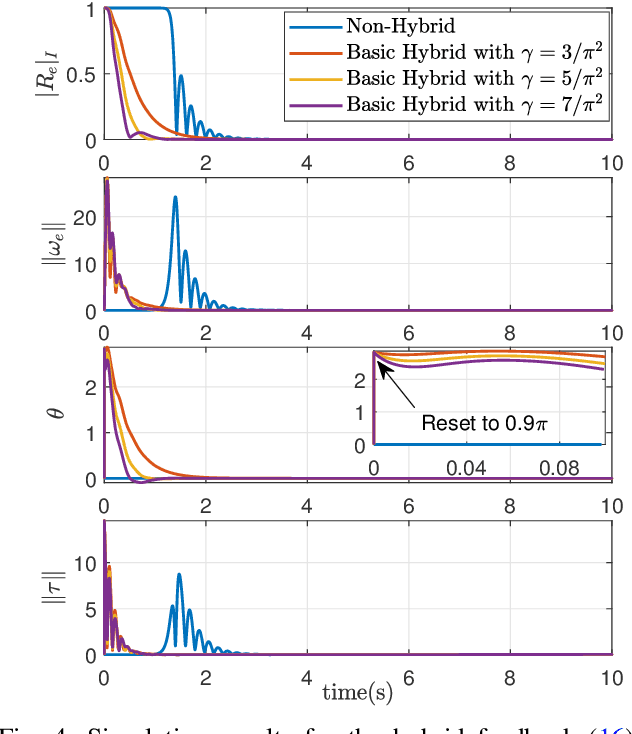
We introduce a new hybrid control strategy, which is conceptually different from the commonly used synergistic hybrid approaches, to efficiently deal with the problem of the undesired equilibria that precludes smooth vectors fields on $SO(3)$ from achieving global stability. The key idea consists in constructing a suitable potential function on $SO(3)\times \mathbb{R}$ involving an auxiliary scalar variable, with flow and jump dynamics, which keeps the state away from the undesired critical points while, at the same time, guarantees a decrease of the potential function over the flows and jumps. Based on this new hybrid mechanism, a hybrid feedback control scheme for the attitude tracking problem on $SO(3)$, endowed with global asymptotic stability and semi-global exponential stability guarantees, is proposed. This control scheme is further improved through a smoothing mechanism that removes the discontinuities in the input torque. The third hybrid control scheme, proposed in this paper, removes the requirement of the angular velocity measurements, while preserving the strong stability guarantees of the first hybrid control scheme. Finally, some simulation results are presented to illustrate the performance of the proposed hybrid controllers.
Observers Design for Inertial Navigation Systems: A Brief Tutorial
Sep 18, 2020The design of navigation observers able to simultaneously estimate the position, linear velocity and orientation of a vehicle in a three-dimensional space is crucial in many robotics and aerospace applications. This problem was mainly dealt with using the extended Kalman filter and its variants which proved to be instrumental in many practical applications. Although practically efficient, the lack of strong stability guarantees of these algorithms motivated the emergence of a new class of geometric navigation observers relying on Riemannian geometry tools, leading to provable strong stability properties. The objective of this brief tutorial is to provide an overview of the existing estimation schemes, as well as some recently developed geometric nonlinear observers, for autonomous navigation systems relying on inertial measurement unit (IMU) and landmark measurements.
Nonlinear State Estimation for Inertial Navigation Systems With Intermittent Measurements
May 07, 2020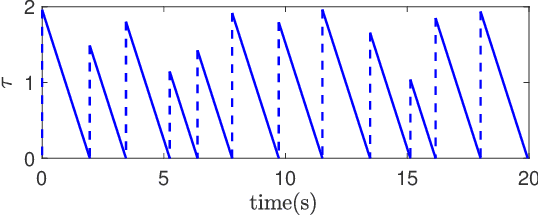
This paper considers the problem of simultaneous estimation of the attitude (orientation), position and linear velocity for vehicles navigating in a three-dimensional space. We propose two types of hybrid nonlinear observers using continuous angular velocity and linear acceleration measurements as well as intermittent landmark position measurements. The first one relies on a fixed-gain design approach based on an infinite-dimensional optimization, while the second one relies on a variable-gain design approach based on a continuous-discrete Riccati equation. For each case, we provide two different observers with and without the estimation of the gravity vector, respectively. The proposed observers are shown to be exponentially stable with a large domain of attraction. Simulation and experimental results are presented to illustrate the performance of the proposed observers.
Trident Segmentation CNN: A Spatiotemporal Transformation CNN for Punctate White Matter Lesions Segmentation in Preterm Neonates
Oct 22, 2019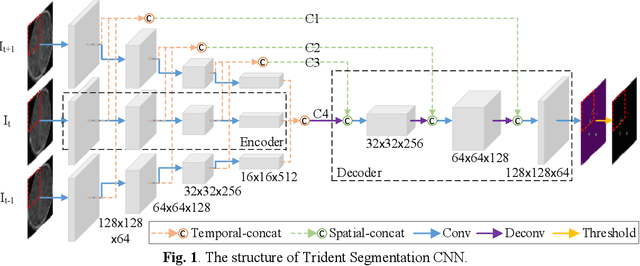
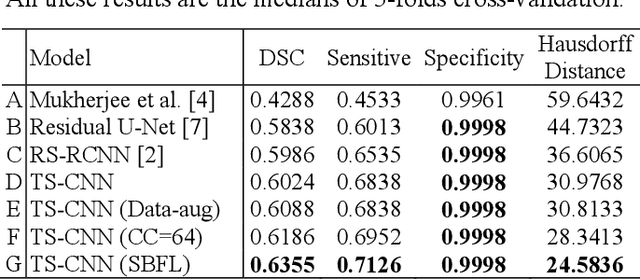
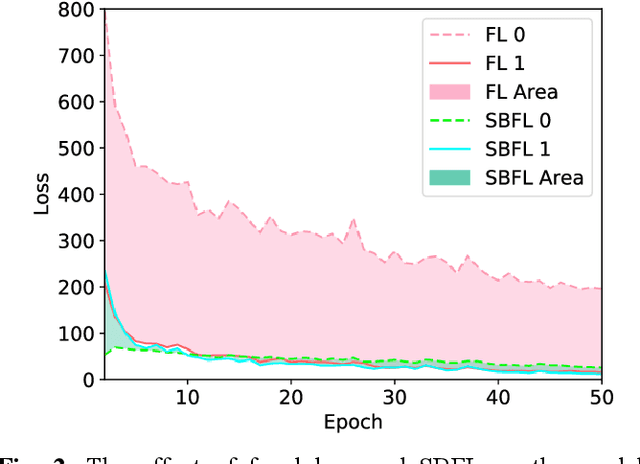
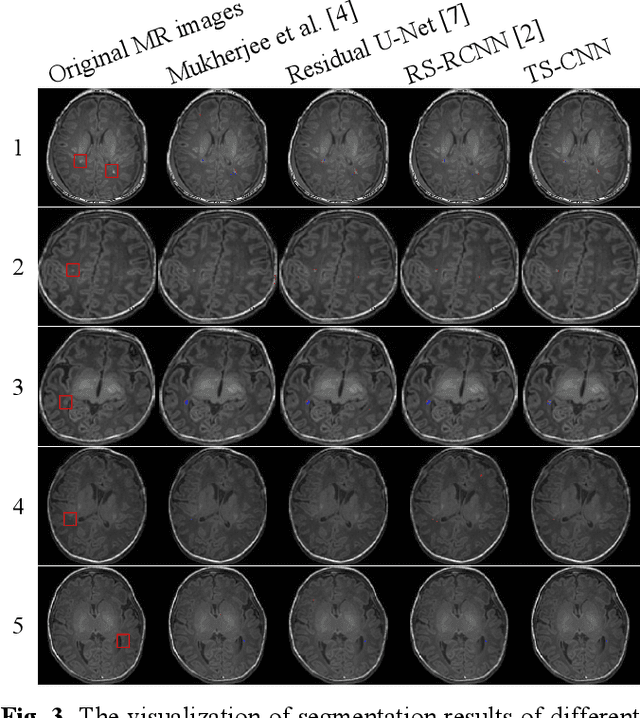
Accurate segmentation of punctate white matter lesions (PWML) in preterm neonates by an automatic algorithm can better assist doctors in diagnosis. However, the existing algorithms have many limitations, such as low detection accuracy and large resource consumption. In this paper, a novel spatiotemporal transformation deep learning method called Trident Segmentation CNN (TS-CNN) is proposed to segment PWML in MR images. It can convert spatial information into temporal information, which reduces the consumption of computing resources. Furthermore, a new improved training loss called Self-balancing Focal Loss (SBFL) is proposed to balance the loss during the training process. The whole model is evaluated on a dataset of 704 MR images. Overall the method achieves median DSC, sensitivity, specificity, and Hausdorff distance of 0.6355, 0.7126, 0.9998, and 24.5836 mm which outperforms the state-of-the-art algorithm. (The code is now available on https://github.com/YalongLiu/Trident-Segmentation-CNN)