 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBootstrapping Imitation Learning for Long-horizon Manipulation via Hierarchical Data Collection Space
May 23, 2025Imitation learning (IL) with human demonstrations is a promising method for robotic manipulation tasks. While minimal demonstrations enable robotic action execution, achieving high success rates and generalization requires high cost, e.g., continuously adding data or incrementally conducting human-in-loop processes with complex hardware/software systems. In this paper, we rethink the state/action space of the data collection pipeline as well as the underlying factors responsible for the prediction of non-robust actions. To this end, we introduce a Hierarchical Data Collection Space (HD-Space) for robotic imitation learning, a simple data collection scheme, endowing the model to train with proactive and high-quality data. Specifically, We segment the fine manipulation task into multiple key atomic tasks from a high-level perspective and design atomic state/action spaces for human demonstrations, aiming to generate robust IL data. We conduct empirical evaluations across two simulated and five real-world long-horizon manipulation tasks and demonstrate that IL policy training with HD-Space-based data can achieve significantly enhanced policy performance. HD-Space allows the use of a small amount of demonstration data to train a more powerful policy, particularly for long-horizon manipulation tasks. We aim for HD-Space to offer insights into optimizing data quality and guiding data scaling. project page: https://hd-space-robotics.github.io.
Robust Key-Frame Stereo Visual SLAM with low-threshold Point and Line Features
Jul 12, 2022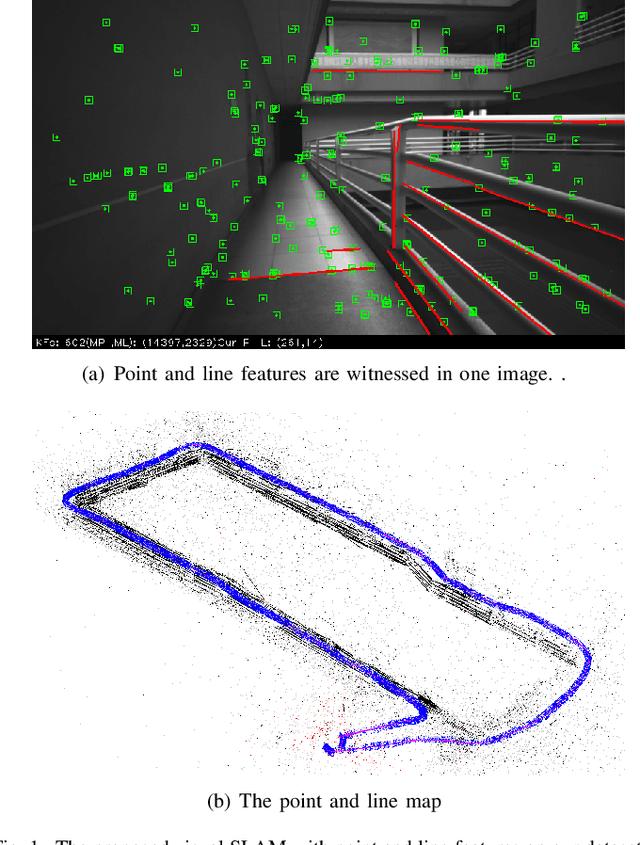
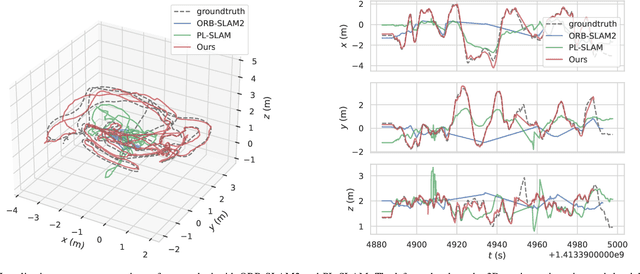
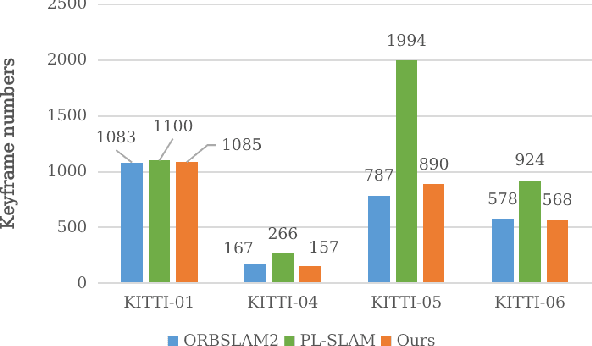
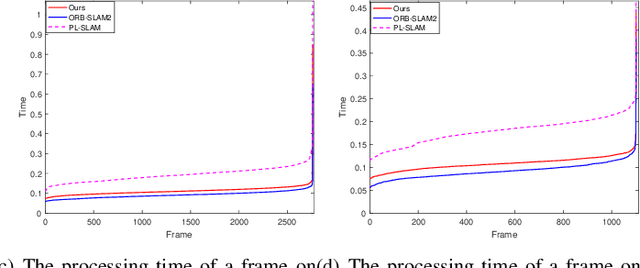
In this paper, we develop a robust, efficient visual SLAM system that utilizes spatial inhibition of low threshold, baseline lines, and closed-loop keyframe features. Using ORB-SLAM2, our methods include stereo matching, frame tracking, local bundle adjustment, and line and point global bundle adjustment. In particular, we contribute re-projection in line with the baseline. Fusing lines in the system consume colossal time, and we reduce the time from distributing points to utilizing spatial suppression of feature points. In addition, low threshold key points can be more effective in dealing with low textures. In order to overcome Tracking keyframe redundant problems, an efficient and robust closed-loop tracking key frame is proposed. The proposed SLAM has been extensively tested in KITTI and EuRoC datasets, demonstrating that the proposed system is superior to state-of-the-art methods in various scenarios.