 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEndoSensorFusion: Particle Filtering-Based Multi-sensory Data Fusion with Switching State-Space Model for Endoscopic Capsule Robots
Sep 25, 2017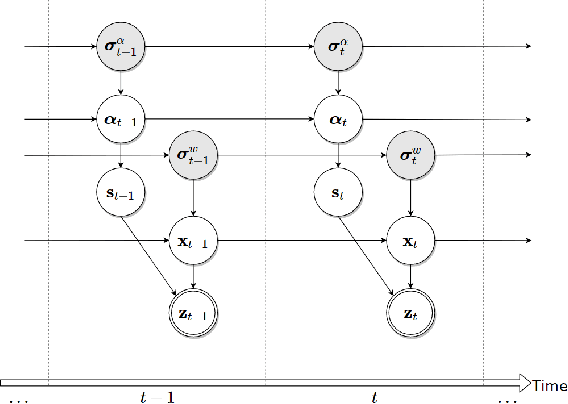
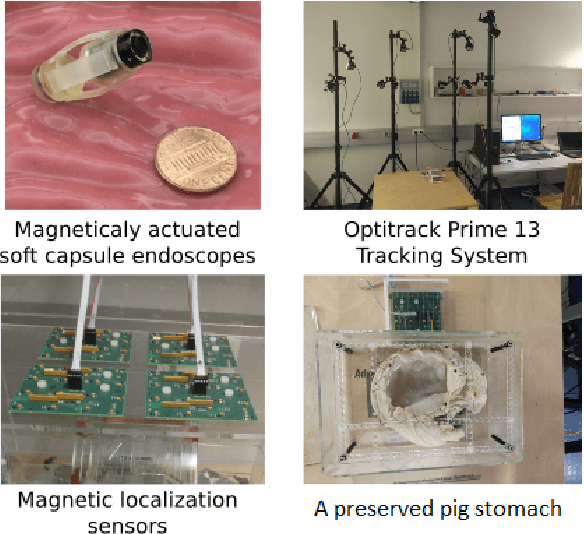
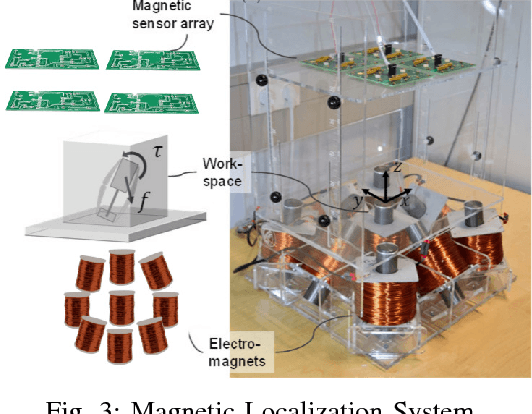
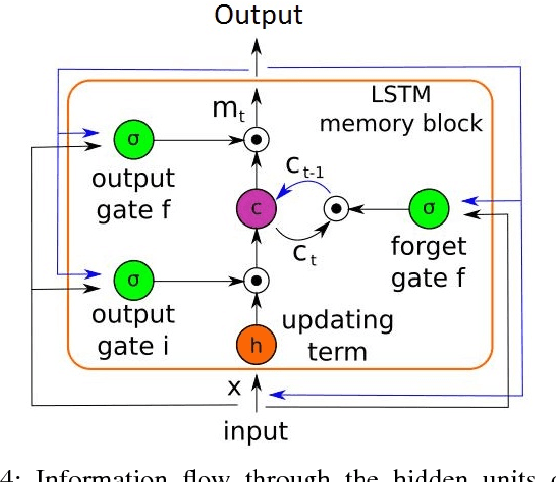
A reliable, real time multi-sensor fusion functionality is crucial for localization of actively controlled capsule endoscopy robots, which are an emerging, minimally invasive diagnostic and therapeutic technology for the gastrointestinal (GI) tract. In this study, we propose a novel multi-sensor fusion approach based on a particle filter that incorporates an online estimation of sensor reliability and a non-linear kinematic model learned by a recurrent neural network. Our method sequentially estimates the true robot pose from noisy pose observations delivered by multiple sensors. We experimentally test the method using 5 degree-of-freedom (5-DoF) absolute pose measurement by a magnetic localization system and a 6-DoF relative pose measurement by visual odometry. In addition, the proposed method is capable of detecting and handling sensor failures by ignoring corrupted data, providing the robustness expected of a medical device. Detailed analyses and evaluations are presented using ex-vivo experiments on a porcine stomach model prove that our system achieves high translational and rotational accuracies for different types of endoscopic capsule robot trajectories.
Endo-VMFuseNet: Deep Visual-Magnetic Sensor Fusion Approach for Uncalibrated, Unsynchronized and Asymmetric Endoscopic Capsule Robot Localization Data
Sep 22, 2017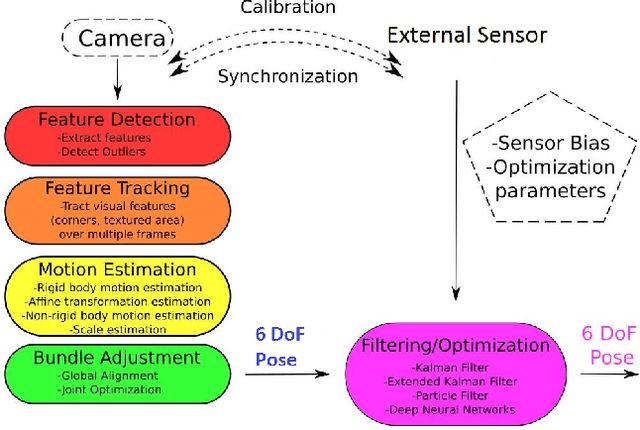
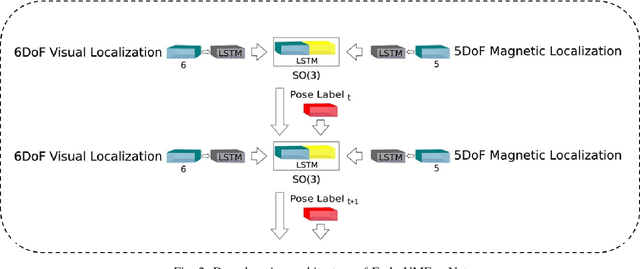
In the last decade, researchers and medical device companies have made major advances towards transforming passive capsule endoscopes into active medical robots. One of the major challenges is to endow capsule robots with accurate perception of the environment inside the human body, which will provide necessary information and enable improved medical procedures. We extend the success of deep learning approaches from various research fields to the problem of uncalibrated, asynchronous, and asymmetric sensor fusion for endoscopic capsule robots. The results performed on real pig stomach datasets show that our method achieves sub-millimeter precision for both translational and rotational movements and contains various advantages over traditional sensor fusion techniques.
Deep EndoVO: A Recurrent Convolutional Neural Network (RCNN) based Visual Odometry Approach for Endoscopic Capsule Robots
Sep 08, 2017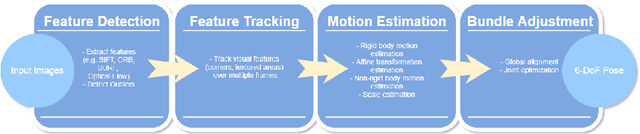
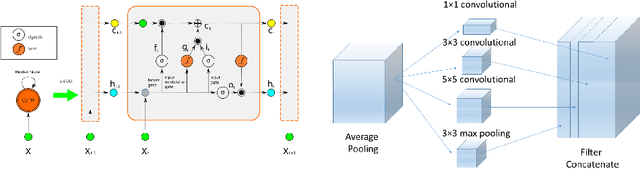
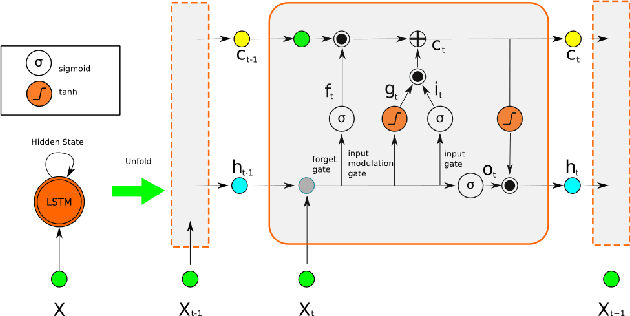
Ingestible wireless capsule endoscopy is an emerging minimally invasive diagnostic technology for inspection of the GI tract and diagnosis of a wide range of diseases and pathologies. Medical device companies and many research groups have recently made substantial progresses in converting passive capsule endoscopes to active capsule robots, enabling more accurate, precise, and intuitive detection of the location and size of the diseased areas. Since a reliable real time pose estimation functionality is crucial for actively controlled endoscopic capsule robots, in this study, we propose a monocular visual odometry (VO) method for endoscopic capsule robot operations. Our method lies on the application of the deep Recurrent Convolutional Neural Networks (RCNNs) for the visual odometry task, where Convolutional Neural Networks (CNNs) and Recurrent Neural Networks (RNNs) are used for the feature extraction and inference of dynamics across the frames, respectively. Detailed analyses and evaluations made on a real pig stomach dataset proves that our system achieves high translational and rotational accuracies for different types of endoscopic capsule robot trajectories.
Sparse-then-Dense Alignment based 3D Map Reconstruction Method for Endoscopic Capsule Robots
Aug 29, 2017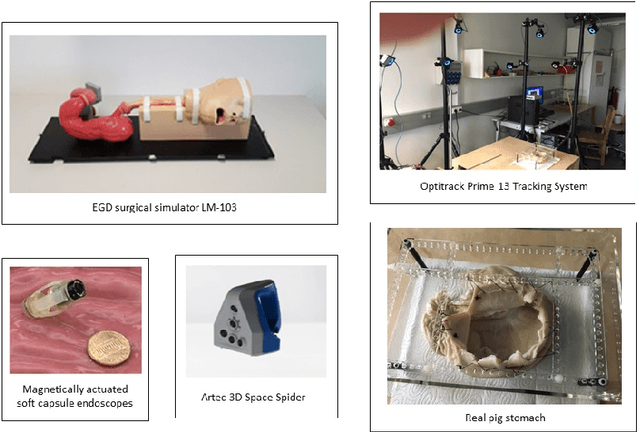
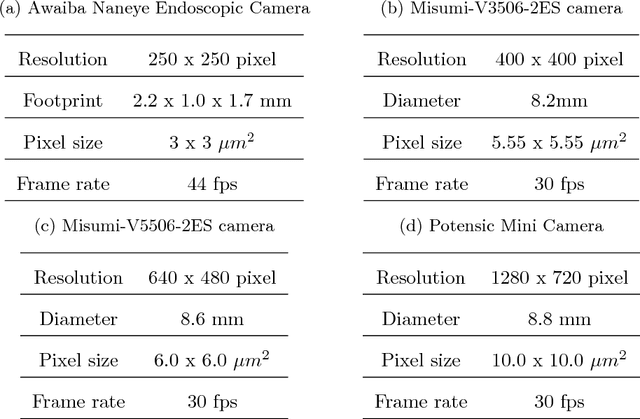
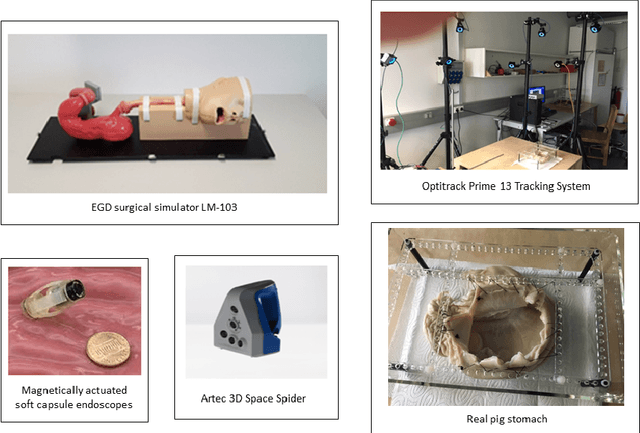
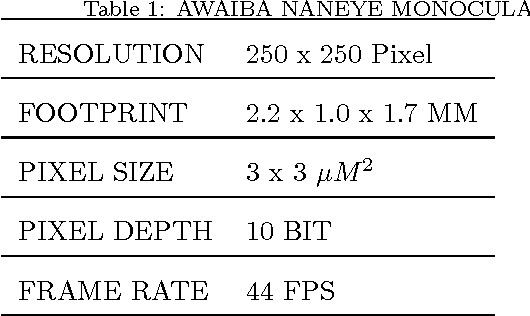
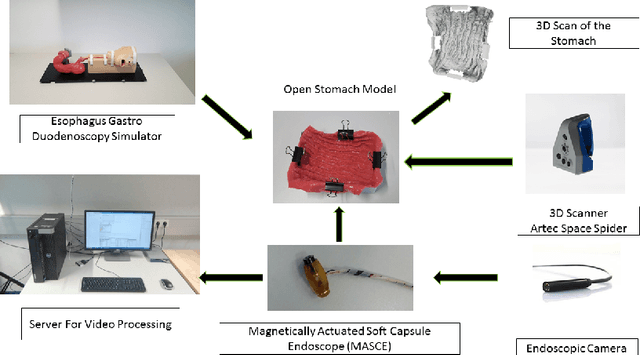
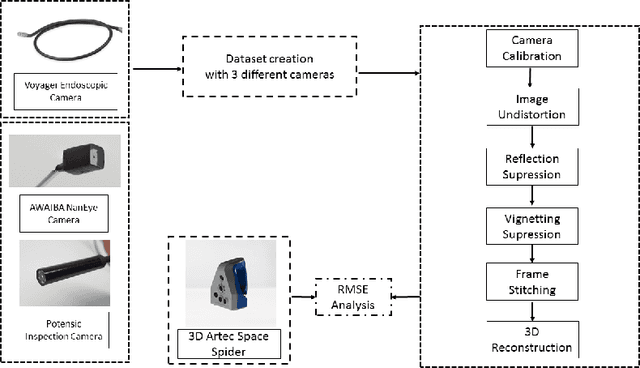
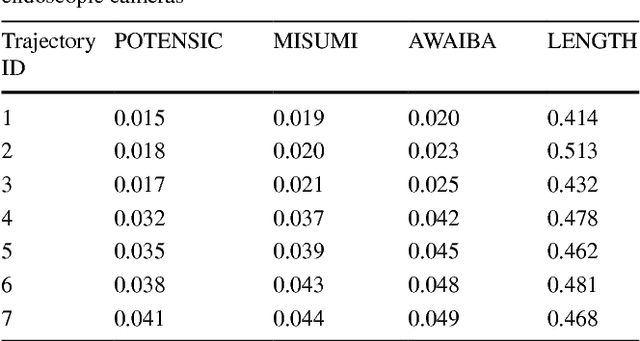
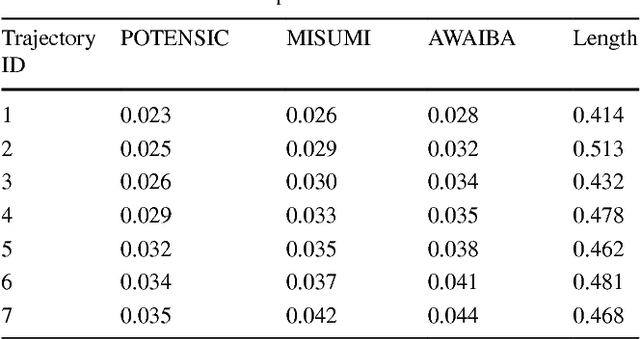
Since the development of capsule endoscopcy technology, substantial progress were made in converting passive capsule endoscopes to robotic active capsule endoscopes which can be controlled by the doctor. However, robotic capsule endoscopy still has some challenges. In particular, the use of such devices to generate a precise and globally consistent three-dimensional (3D) map of the entire inner organ remains an unsolved problem. Such global 3D maps of inner organs would help doctors to detect the location and size of diseased areas more accurately, precisely, and intuitively, thus permitting more accurate and intuitive diagnoses. The proposed 3D reconstruction system is built in a modular fashion including preprocessing, frame stitching, and shading-based 3D reconstruction modules. We propose an efficient scheme to automatically select the key frames out of the huge quantity of raw endoscopic images. Together with a bundle fusion approach that aligns all the selected key frames jointly in a globally consistent way, a significant improvement of the mosaic and 3D map accuracy was reached. To the best of our knowledge, this framework is the first complete pipeline for an endoscopic capsule robot based 3D map reconstruction containing all of the necessary steps for a reliable and accurate endoscopic 3D map. For the qualitative evaluations, a real pig stomach is employed. Moreover, for the first time in literature, a detailed and comprehensive quantitative analysis of each proposed pipeline modules is performed using a non-rigid esophagus gastro duodenoscopy simulator, four different endoscopic cameras, a magnetically activated soft capsule robot (MASCE), a sub-millimeter precise optical motion tracker and a fine-scale 3D optical scanner.
A fully dense and globally consistent 3D map reconstruction approach for GI tract to enhance therapeutic relevance of the endoscopic capsule robot
May 18, 2017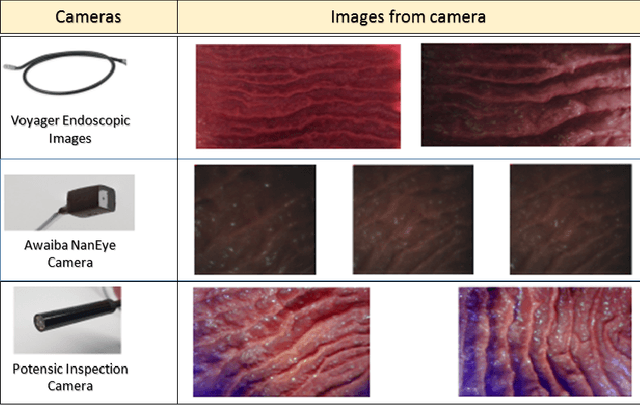
In the gastrointestinal (GI) tract endoscopy field, ingestible wireless capsule endoscopy is emerging as a novel, minimally invasive diagnostic technology for inspection of the GI tract and diagnosis of a wide range of diseases and pathologies. Since the development of this technology, medical device companies and many research groups have made substantial progress in converting passive capsule endoscopes to robotic active capsule endoscopes with most of the functionality of current active flexible endoscopes. However, robotic capsule endoscopy still has some challenges. In particular, the use of such devices to generate a precise three-dimensional (3D) mapping of the entire inner organ remains an unsolved problem. Such global 3D maps of inner organs would help doctors to detect the location and size of diseased areas more accurately and intuitively, thus permitting more reliable diagnoses. To our knowledge, this paper presents the first complete pipeline for a complete 3D visual map reconstruction of the stomach. The proposed pipeline is modular and includes a preprocessing module, an image registration module, and a final shape-from-shading-based 3D reconstruction module; the 3D map is primarily generated by a combination of image stitching and shape-from-shading techniques, and is updated in a frame-by-frame iterative fashion via capsule motion inside the stomach. A comprehensive quantitative analysis of the proposed 3D reconstruction method is performed using an esophagus gastro duodenoscopy simulator, three different endoscopic cameras, and a 3D optical scanner.
A Non-Rigid Map Fusion-Based RGB-Depth SLAM Method for Endoscopic Capsule Robots
May 15, 2017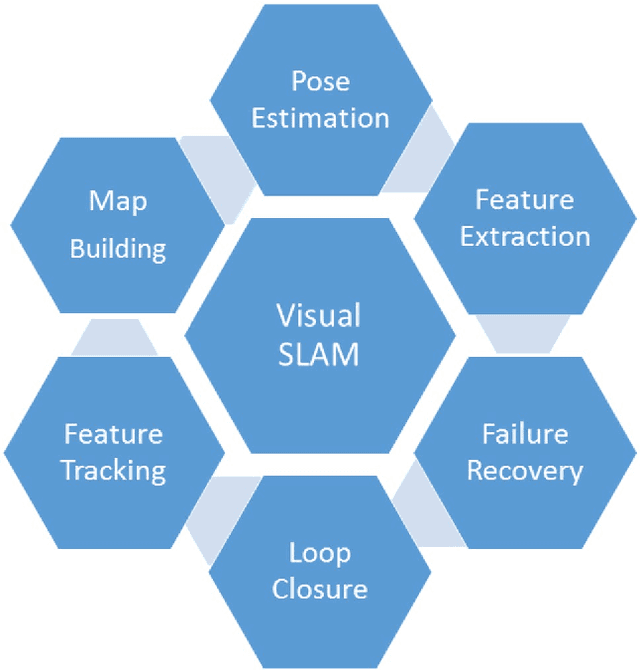
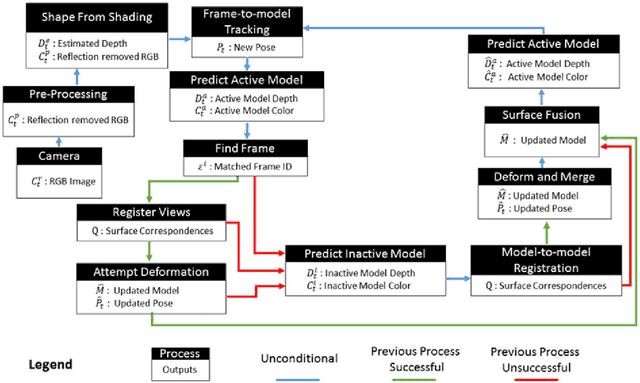
In the gastrointestinal (GI) tract endoscopy field, ingestible wireless capsule endoscopy is considered as a minimally invasive novel diagnostic technology to inspect the entire GI tract and to diagnose various diseases and pathologies. Since the development of this technology, medical device companies and many groups have made significant progress to turn such passive capsule endoscopes into robotic active capsule endoscopes to achieve almost all functions of current active flexible endoscopes. However, the use of robotic capsule endoscopy still has some challenges. One such challenge is the precise localization of such active devices in 3D world, which is essential for a precise three-dimensional (3D) mapping of the inner organ. A reliable 3D map of the explored inner organ could assist the doctors to make more intuitive and correct diagnosis. In this paper, we propose to our knowledge for the first time in literature a visual simultaneous localization and mapping (SLAM) method specifically developed for endoscopic capsule robots. The proposed RGB-Depth SLAM method is capable of capturing comprehensive dense globally consistent surfel-based maps of the inner organs explored by an endoscopic capsule robot in real time. This is achieved by using dense frame-to-model camera tracking and windowed surfelbased fusion coupled with frequent model refinement through non-rigid surface deformations.
A Deep Learning Based 6 Degree-of-Freedom Localization Method for Endoscopic Capsule Robots
May 15, 2017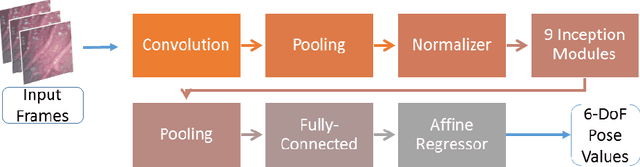
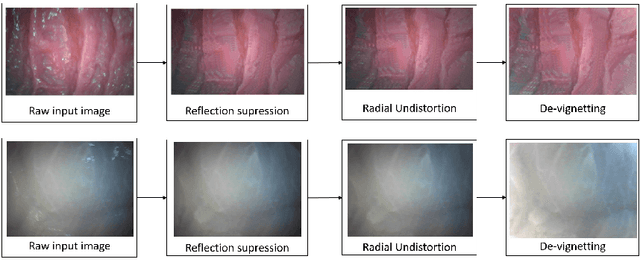
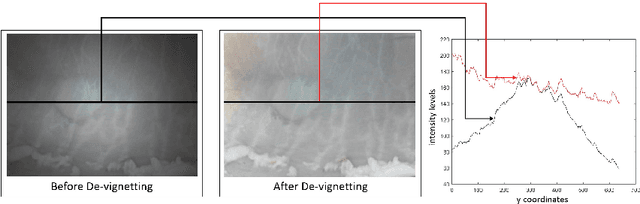
We present a robust deep learning based 6 degrees-of-freedom (DoF) localization system for endoscopic capsule robots. Our system mainly focuses on localization of endoscopic capsule robots inside the GI tract using only visual information captured by a mono camera integrated to the robot. The proposed system is a 23-layer deep convolutional neural network (CNN) that is capable to estimate the pose of the robot in real time using a standard CPU. The dataset for the evaluation of the system was recorded inside a surgical human stomach model with realistic surface texture, softness, and surface liquid properties so that the pre-trained CNN architecture can be transferred confidently into a real endoscopic scenario. An average error of 7:1% and 3:4% for translation and rotation has been obtained, respectively. The results accomplished from the experiments demonstrate that a CNN pre-trained with raw 2D endoscopic images performs accurately inside the GI tract and is robust to various challenges posed by reflection distortions, lens imperfections, vignetting, noise, motion blur, low resolution, and lack of unique landmarks to track.