 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevati: Transparent GPU-Free Time-Warp Emulation for LLM Serving
Jan 01, 2026Deploying LLMs efficiently requires testing hundreds of serving configurations, but evaluating each one on a GPU cluster takes hours and costs thousands of dollars. Discrete-event simulators are faster and cheaper, but they require re-implementing the serving system's control logic -- a burden that compounds as frameworks evolve. We present Revati, a time-warp emulator that enables performance modeling by directly executing real serving system code at simulation-like speed. The system intercepts CUDA API calls to virtualize device management, allowing serving frameworks to run without physical GPUs. Instead of executing GPU kernels, it performs time jumps -- fast-forwarding virtual time by predicted kernel durations. We propose a coordination protocol that synchronizes these jumps across distributed processes while preserving causality. On vLLM and SGLang, Revati achieves less than 5% prediction error across multiple models and parallelism configurations, while running 5-17x faster than real GPU execution.
dtControl 2.0: Explainable Strategy Representation via Decision Tree Learning Steered by Experts
Jan 15, 2021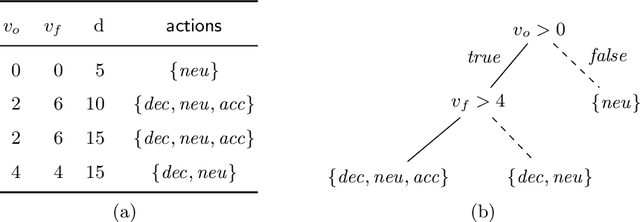
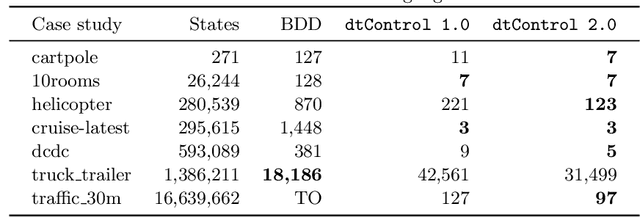
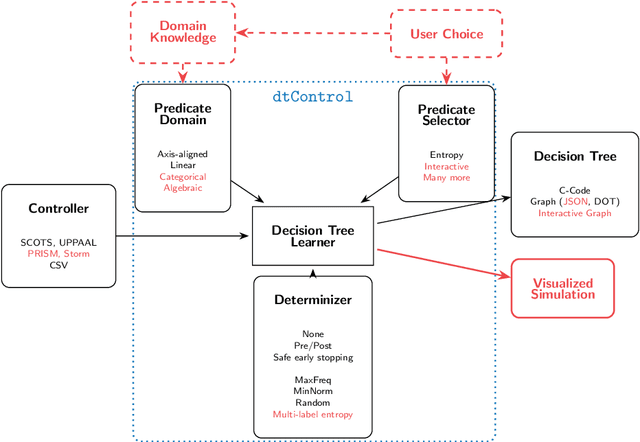
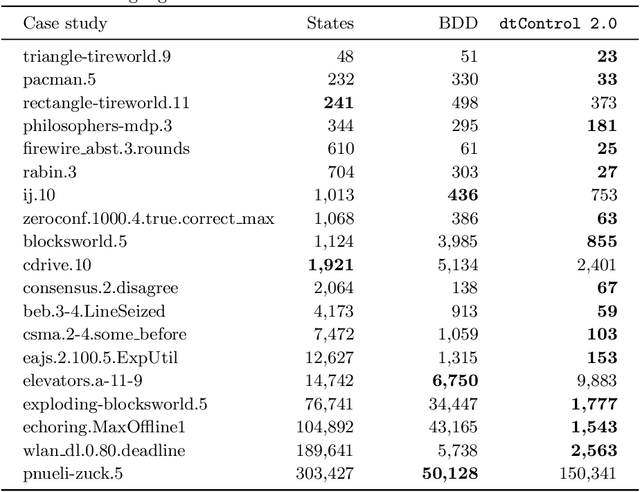
Recent advances have shown how decision trees are apt data structures for concisely representing strategies (or controllers) satisfying various objectives. Moreover, they also make the strategy more explainable. The recent tool dtControl had provided pipelines with tools supporting strategy synthesis for hybrid systems, such as SCOTS and Uppaal Stratego. We present dtControl 2.0, a new version with several fundamentally novel features. Most importantly, the user can now provide domain knowledge to be exploited in the decision tree learning process and can also interactively steer the process based on the dynamically provided information. To this end, we also provide a graphical user interface. It allows for inspection and re-computation of parts of the result, suggesting as well as receiving advice on predicates, and visual simulation of the decision-making process. Besides, we interface model checkers of probabilistic systems, namely Storm and PRISM and provide dedicated support for categorical enumeration-type state variables. Consequently, the controllers are more explainable and smaller.