 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample Complexity of Probabilistic Roadmaps via $ε$-nets
Sep 20, 2019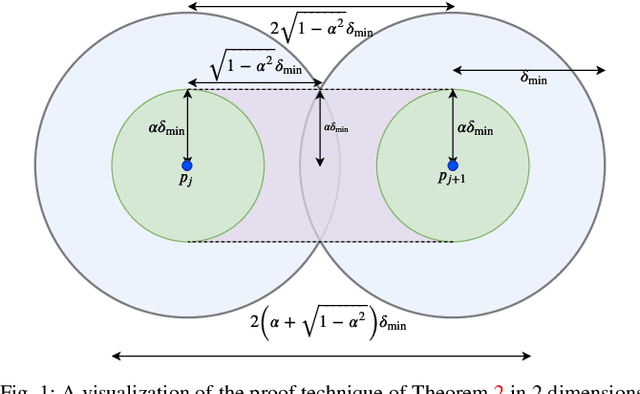
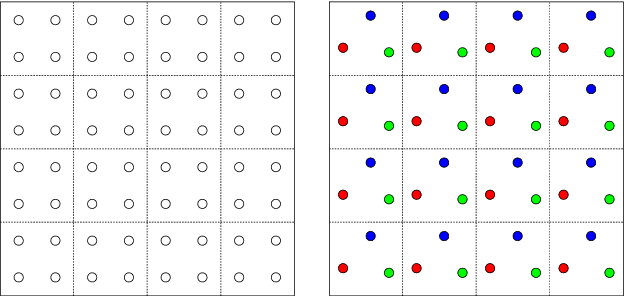
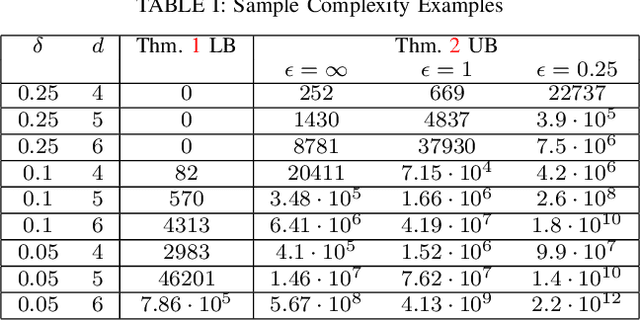
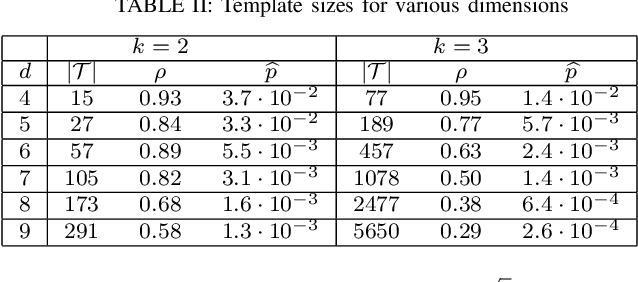
We study fundamental theoretical aspects of probabilistic roadmaps (PRM) in the finite time (non-asymptotic) regime. In particular, we investigate how completeness and optimality guarantees of the approach are influenced by the underlying deterministic sampling distribution ${\mathcal{X}}$ and connection radius ${r>0}$. We develop the notion of ${(\delta,\epsilon)}$-completeness of the parameters ${\mathcal{X}, r}$, which indicates that for every motion-planning problem of clearance at least ${\delta>0}$, PRM using ${\mathcal{X}, r}$ returns a solution no longer than ${1+\epsilon}$ times the shortest ${\delta}$-clear path. Leveraging the concept of ${\epsilon}$-nets, we characterize in terms of lower and upper bounds the number of samples needed to guarantee ${(\delta,\epsilon)}$-completeness. This is in contrast with previous work which mostly considered the asymptotic regime in which the number of samples tends to infinity. In practice, we propose a sampling distribution inspired by ${\epsilon}$-nets that achieves nearly the same coverage as grids while using significantly fewer samples.
Robust and Adaptive Planning under Model Uncertainty
Jan 09, 2019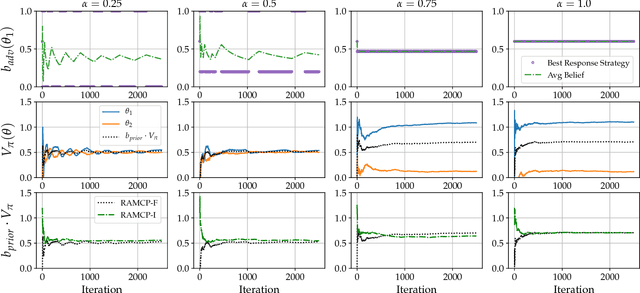
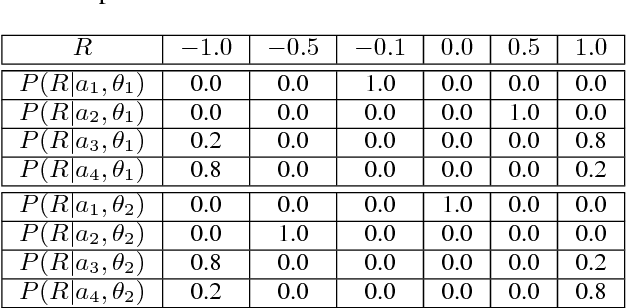
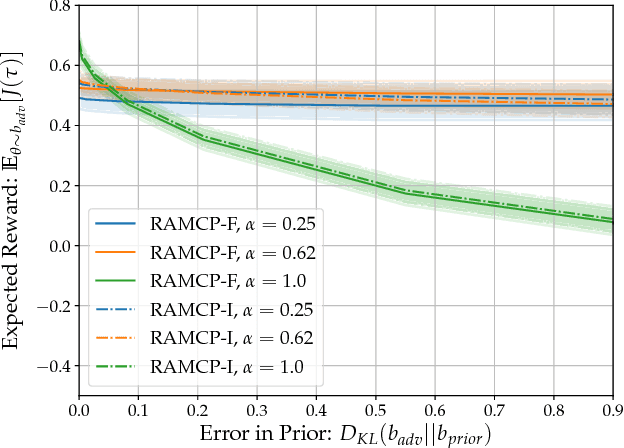
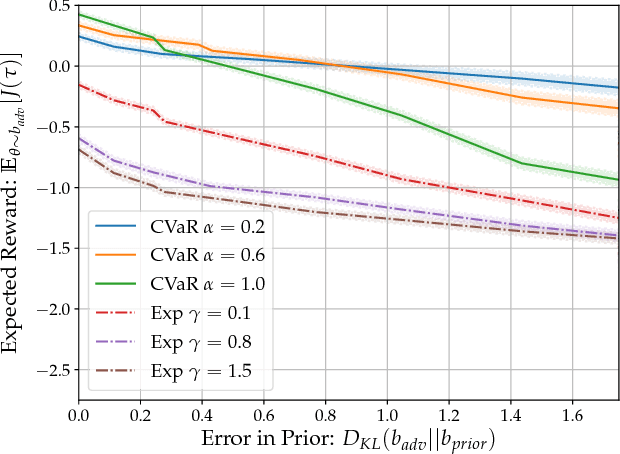
Planning under model uncertainty is a fundamental problem across many applications of decision making and learning. In this paper, we propose the Robust Adaptive Monte Carlo Planning (RAMCP) algorithm, which allows computation of risk-sensitive Bayes-adaptive policies that optimally trade off exploration, exploitation, and robustness. RAMCP formulates the risk-sensitive planning problem as a two-player zero-sum game, in which an adversary perturbs the agent's belief over the models. We introduce two versions of the RAMCP algorithm. The first, RAMCP-F, converges to an optimal risk-sensitive policy without having to rebuild the search tree as the underlying belief over models is perturbed. The second version, RAMCP-I, improves computational efficiency at the cost of losing theoretical guarantees, but is shown to yield empirical results comparable to RAMCP-F. RAMCP is demonstrated on an n-pull multi-armed bandit problem, as well as a patient treatment scenario.